ROS 安装kinect驱动+测试
有时 ,需要用到kinect 的所有需要驱动才能使用kinect ,turtlebot2上的传感器就是kinect ,所以kinect 的用处还是很多的 , 今天就来讲一下kinect 驱动在unbuntu 中的安装。
1.第一步要有个ubuntu 系统, 我的系统是 14.04.5的 还要有一个kinect 加上kinect 的适配器。还有就是要把驱动的包下载下来。这四个条件的都具备了 ,我们开始安装驱动。
OpenNI: https://pan.baidu.com/s/1o7YzAgq (百度云的链接) SensorKinect: https://pan.baidu.com/s/1o8Nk5z8 (百度云的分享)
2.接下来安装步骤,进行安装,尽量不要拷贝,多用tab 提示
//libfreenect for kinect
sudo apt-get install libfreenect-dev
sudo apt-get install ros-indigo-freenect-launch //openni
//Installing dependencies:
sudo apt-get install g++ python libusb-1.0-0-dev freeglut3-dev
sudo apt-get install doxygen graphviz mono-complete
sudo apt-get install openjdk-7-jdk //Intalling OpenNI:
git clone https://github.com/OpenNI/OpenNI.git
cd OpenNI
git checkout Unstable-1.5.4.0
cd Platform/Linux/CreateRedist
sudo chmod +x RedistMaker
./RedistMaker
cd ../Redist/OpenNI-Bin-Dev-Linux-[xxx]
sudo ./install.sh //Installing Kinect driver
git clone git://github.com/ph4m/SensorKinect.git
cd SensorKinect/Platform/Linux/CreateRedist
sudo chmod +x RedistMaker
./RedistMaker
cd ../Redist/Sensor-Bin-Linux-x64-v*
sudo ./install.sh
按照上边的步骤安装,如果没有错误。就说明驱动安装没有什么问题。
3.下载测试的程序,进行测试kinect 的是否安装成功。
cd ~/catkin_ws/src
git clone https://github.com/ros-drivers/openni_launch
git clone https://github.com/ros-drivers/openni_camera
cd ..
catkin_make
source devel/setup.bash
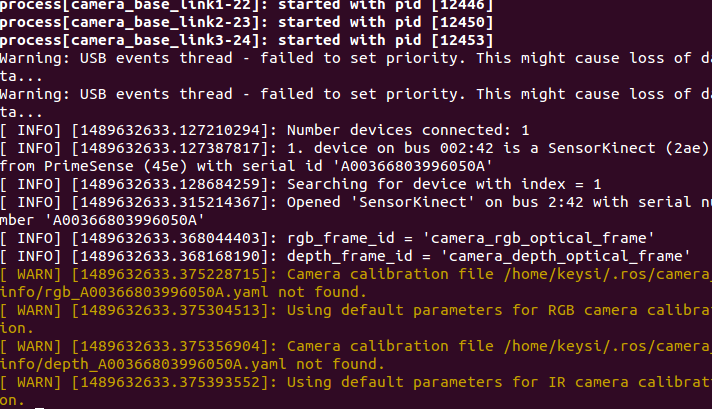
4.运行launch 文件启动kinect
roslaunch openni_launch openni.launch
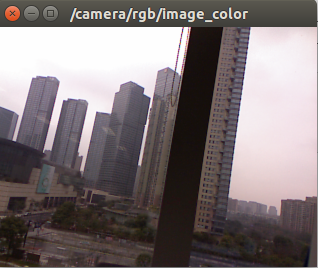
5.显示kinect 中的话题
rosrun image_view image_view image:=/camera/rgb/image_color
ROS 安装kinect驱动+测试的更多相关文章
- ARM TK1 安装kinect驱动
首先安装usb库 $ git clone https://github.com/libusb/libusb.git 编译libusb需要的工具 $ sudo apt-get install autoc ...
- Jetson TX1 安装Kinect驱动
1.添加Universe源 $ sudo apt-add-repository universe $ sudo apt-get update 2.安装编译工具和依赖项 $ sudo apt-get i ...
- kinect在ros上的初步测试---17
摘要: 原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 1.在使用本贴前必须先按照我的上一个博文正确在ubuntu上安装kinect驱动:http:// ...
- Kinect for Xbox one(v2) + Ubuntu 14.04 +ROS 安装
相比于kinect for xbox 360(v1)通过结构光来获取深度,Kinect for Xbox one(v2) 采用time flight技术,极大改善了深度图像的性能. kinect fo ...
- Kinect1驱动 PCL OpenCV ROS 安装
1. OpenCV安装 1)在终端安装依赖项sudo apt-get install build-essential libgtk2.0-dev libjpeg-dev libtiff4-dev li ...
- Debian/Ubuntu手动编译安装MongoDB C++11驱动及驱动测试
本文章仅限cnblogs网站内转载!请某网站自觉,遵纪守法,尊重原创! 系统环境情况: 最小化.无桌面环境 新安装的Debian 8 Server 版本操作系统虚拟机一台 手动编译安装MongoDB ...
- ROS学习笔记一:ROS安装与测试
1 Ubuntu和ROS版本的对应关系 Ubuntu 和 ROS 都存在不同的版本,其对应关系如下: 注:如果Ubuntu版本和ROS版本不对应的话,安装就不会成功了- 笔者安装的是Ubuntu14. ...
- ubuntu16.04+ROS安装kinectV1
1.安装驱动 安装ROS软件包以下2种方式,任选一种即可,当然全部安装也没有问题 1)使用openni_launch sudo apt-get install ros-kinetic-openni-c ...
- ROS与深度相机入门教程-在ROS使用kinect v1摄像头
ROS与深度相机入门教程-在ROS使用kinect v1摄像头 说明: 介绍在ros安装和使用kinect v1摄像头 介绍freenect包 安装驱动 deb安装 $ sudo apt-get in ...
随机推荐
- python中强大优雅的列表推导表达式
推导表达式其实就是简化一些循环判断操作等 生成一个数字1-10的列表,可以有多少种方法? >>> l = [ 1, 2, 3, 4, 5, 6, 7, 8, 9, 10 ] > ...
- HDU1824(2-SAT)
Let's go home Time Limit: 10000/1000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)To ...
- python去掉字符串中空格的方法
1.strip():把头和尾的空格去掉 2.lstrip():把左边的空格去掉 3.rstrip():把右边的空格去掉 4.replace('c1','c2'):把字符串里的c1替换成c2.故可以用r ...
- python的深浅拷贝以及fromkeys的用法
1.join()的用法:使用前面的字符串.对后面的列表进行拼接,拼接结果是一个字符串 # lst = ["alex","dsb",'wusir','xsb'] ...
- MySQL两种存储引擎: MyISAM和InnoDB
MySQL两种存储引擎: MyISAM和InnoDB 简单总结 MyISAM是MySQL的默认数据库引擎(5.5版之前),由早期的ISAM(Indexed Sequential Access Me ...
- 获取windows鼠标的当前坐标
#先下载pyautogui库,pip install pyautogui import os,time import pyautogui as pag try: while True: print ( ...
- Bootstrap源码分析系列之整体架构
作为一名合格的前端工程师,你肯定听说过Bootstarp框架.确实可以说Bootstrap框架是最流行的前端框架之一.可是也有人说Bootstrap是给后端和前端小白用的,我认为只要学习它能给我们前端 ...
- linq not in 查询
想要的sql: select A.* from BL_BCSS_Invoice A join BL_BCSS_OfflineInvoice B on A.ID!=B.InvoiceID; 不知道如何写 ...
- SQL Server 从2000复制数据到2008及以上版本的一种方法
1.通过Linked Servers 执行sql出现错误提示,无法执行复制数据操作. sql: insert into tb_User select from [**.**.*.**].DB.dbo. ...
- mysql processlist 线程状态
Analyzing 线程是对MyISAM 表的统计信息做分析(例如, ANALYZE TABLE ). checking permissions 线程是检查服务器是否具有所需的权限来执行该 ...