ROS 安装kinect驱动+测试
有时 ,需要用到kinect 的所有需要驱动才能使用kinect ,turtlebot2上的传感器就是kinect ,所以kinect 的用处还是很多的 , 今天就来讲一下kinect 驱动在unbuntu 中的安装。
1.第一步要有个ubuntu 系统, 我的系统是 14.04.5的 还要有一个kinect 加上kinect 的适配器。还有就是要把驱动的包下载下来。这四个条件的都具备了 ,我们开始安装驱动。
OpenNI: https://pan.baidu.com/s/1o7YzAgq (百度云的链接) SensorKinect: https://pan.baidu.com/s/1o8Nk5z8 (百度云的分享)
2.接下来安装步骤,进行安装,尽量不要拷贝,多用tab 提示
//libfreenect for kinect
sudo apt-get install libfreenect-dev
sudo apt-get install ros-indigo-freenect-launch //openni
//Installing dependencies:
sudo apt-get install g++ python libusb-1.0-0-dev freeglut3-dev
sudo apt-get install doxygen graphviz mono-complete
sudo apt-get install openjdk-7-jdk //Intalling OpenNI:
git clone https://github.com/OpenNI/OpenNI.git
cd OpenNI
git checkout Unstable-1.5.4.0
cd Platform/Linux/CreateRedist
sudo chmod +x RedistMaker
./RedistMaker
cd ../Redist/OpenNI-Bin-Dev-Linux-[xxx]
sudo ./install.sh //Installing Kinect driver
git clone git://github.com/ph4m/SensorKinect.git
cd SensorKinect/Platform/Linux/CreateRedist
sudo chmod +x RedistMaker
./RedistMaker
cd ../Redist/Sensor-Bin-Linux-x64-v*
sudo ./install.sh
按照上边的步骤安装,如果没有错误。就说明驱动安装没有什么问题。
3.下载测试的程序,进行测试kinect 的是否安装成功。
cd ~/catkin_ws/src
git clone https://github.com/ros-drivers/openni_launch
git clone https://github.com/ros-drivers/openni_camera
cd ..
catkin_make
source devel/setup.bash
4.运行launch 文件启动kinect
roslaunch openni_launch openni.launch
5.显示kinect 中的话题
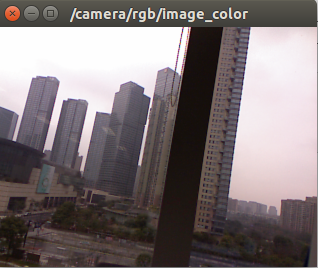
rosrun image_view image_view image:=/camera/rgb/image_color
ROS 安装kinect驱动+测试的更多相关文章
- ARM TK1 安装kinect驱动
首先安装usb库 $ git clone https://github.com/libusb/libusb.git 编译libusb需要的工具 $ sudo apt-get install autoc ...
- Jetson TX1 安装Kinect驱动
1.添加Universe源 $ sudo apt-add-repository universe $ sudo apt-get update 2.安装编译工具和依赖项 $ sudo apt-get i ...
- kinect在ros上的初步测试---17
摘要: 原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 1.在使用本贴前必须先按照我的上一个博文正确在ubuntu上安装kinect驱动:http:// ...
- Kinect for Xbox one(v2) + Ubuntu 14.04 +ROS 安装
相比于kinect for xbox 360(v1)通过结构光来获取深度,Kinect for Xbox one(v2) 采用time flight技术,极大改善了深度图像的性能. kinect fo ...
- Kinect1驱动 PCL OpenCV ROS 安装
1. OpenCV安装 1)在终端安装依赖项sudo apt-get install build-essential libgtk2.0-dev libjpeg-dev libtiff4-dev li ...
- Debian/Ubuntu手动编译安装MongoDB C++11驱动及驱动测试
本文章仅限cnblogs网站内转载!请某网站自觉,遵纪守法,尊重原创! 系统环境情况: 最小化.无桌面环境 新安装的Debian 8 Server 版本操作系统虚拟机一台 手动编译安装MongoDB ...
- ROS学习笔记一:ROS安装与测试
1 Ubuntu和ROS版本的对应关系 Ubuntu 和 ROS 都存在不同的版本,其对应关系如下: 注:如果Ubuntu版本和ROS版本不对应的话,安装就不会成功了- 笔者安装的是Ubuntu14. ...
- ubuntu16.04+ROS安装kinectV1
1.安装驱动 安装ROS软件包以下2种方式,任选一种即可,当然全部安装也没有问题 1)使用openni_launch sudo apt-get install ros-kinetic-openni-c ...
- ROS与深度相机入门教程-在ROS使用kinect v1摄像头
ROS与深度相机入门教程-在ROS使用kinect v1摄像头 说明: 介绍在ros安装和使用kinect v1摄像头 介绍freenect包 安装驱动 deb安装 $ sudo apt-get in ...
随机推荐
- linux系统编程:cp的另外一种实现方式
之前,这篇文章:linux系统编程:自己动手写一个cp命令 已经实现过一个版本. 这里再来一个版本,涉及知识点: linux系统编程:open常用参数详解 Linux系统编程:简单文件IO操作 /*= ...
- 【 js 基础 】为什么 call 比 apply 快?
这是一个非常有意思的问题. 在看源码的过程中,总会遇到这样的写法: var triggerEvents = function(events, args) { var ev, i = -1, l = e ...
- js-ES6学习笔记-Promise对象(2)
1.Promise实例具有then方法,也就是说,then方法是定义在原型对象Promise.prototype上的.它的作用是为Promise实例添加状态改变时的回调函数. 2.Promise.pr ...
- windows 远程连接
* 方法1:windows自带的远程工具 缺点:如果操作系统是家庭版,会一致连接不上:尽管想办法把这个功能打开: 步骤: * 打开允许远程连接: 点进去自己设置就行,没有什么好说的 设置完之后,需要允 ...
- MiUI开发者版刷入xposed框架--简洁方法
一,首先要确定手机是否解锁 可以去这里查看怎么解锁: http://www.miui.com/unlock/index.html 二,手机系统需要是开发者版,且在安全中心的授权管理打开了ROOT授权 ...
- [CENTOS7] 将域群组加入到Sudoer里
文章来源:https://derflounder.wordpress.com/2012/12/14/adding-ad-domain-groups-to-etcsudoers/ Adding AD d ...
- (笔记)MySQL 之 Metadata Locking 研究(5.5版本)
MySQL5.5 中引入了 metadata lock. 顾名思义,metadata lock 不是为了保护表中的数据的,而是保护 database objects(元数据)的.包括表结构.sch ...
- Android分区
1. Android 分区: 2. Android各个分区的作用: 2.1 modem分区 实现手机必需的通信功能,大家通常所的刷RADIO就是刷写modem分区,在所有适配的ROM中这部分是不动,否 ...
- apache 允许 访问软链接 ( Apache won't follow symlinks (403 Forbidden) )
当我们在 apache 中 进行访问 www 文件夹之外的目录的时候,我们可以使用软链接的方式来进行协助访问. 我在 html 文件夹 下面创建 了 如下软链接 link: [root@dhcp-- ...
- Centos 6.5-yum安装出现错误解决方案
最近在用Centos 6.5 的时候出现了以下情况: 遇到这种问题试试以下方法: 1.检查是否能上网:ping www.baidu.com 如果显示没有连接的话,就说明没网,也就无法使用yum 命令安 ...