Arduino ULN2009驱动步进电机
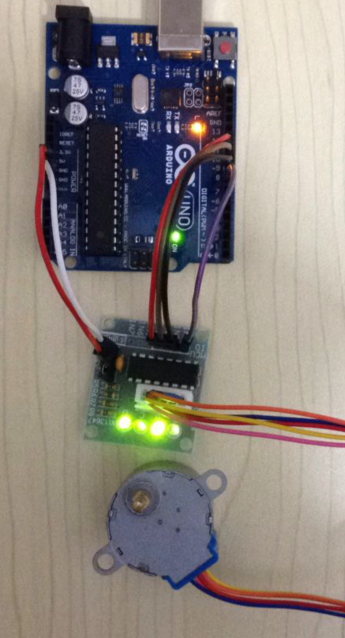
一.实物图
二.例子代码
注:代码来自老外 http://www.4tronix.co.uk/arduino/Stepper-Motors.php
功能:控制电机正反转
// This Arduino example demonstrates bidirectional operation of a
// 28BYJ-48, using a ULN2003 interface board to drive the stepper.
// The 28BYJ-48 motor is a 4-phase, 8-beat motor, geared down by
// a factor of 68. One bipolar winding is on motor pins 1 & 3 and
// the other on motor pins 2 & 4. The step angle is 5.625/64 and the
// operating Frequency is 100pps. Current draw is 92mA.
//////////////////////////////////////////////// //declare variables for the motor pins
int motorPin1 = 8; // Blue - 28BYJ48 pin 1
int motorPin2 = 9; // Pink - 28BYJ48 pin 2
int motorPin3 = 10; // Yellow - 28BYJ48 pin 3
int motorPin4 = 11; // Orange - 28BYJ48 pin 4
// Red - 28BYJ48 pin 5 (VCC) int motorSpeed = 1200; //variable to set stepper speed
int count = 0; // count of steps made
int countsperrev = 512; // number of steps per full revolution
int lookup[8] = {B01000, B01100, B00100, B00110, B00010, B00011, B00001, B01001}; //////////////////////////////////////////////////////////////////////////////
void setup() {
//declare the motor pins as outputs
pinMode(motorPin1, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(motorPin4, OUTPUT);
Serial.begin(9600);
} //////////////////////////////////////////////////////////////////////////////
void loop(){
if(count < countsperrev )
clockwise();
else if (count == countsperrev * 2)
count = 0;
else
anticlockwise();
count++;
} //////////////////////////////////////////////////////////////////////////////
//set pins to ULN2003 high in sequence from 1 to 4
//delay "motorSpeed" between each pin setting (to determine speed)
void anticlockwise()
{
for(int i = 0; i < 8; i++)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
} void clockwise()
{
for(int i = 7; i >= 0; i--)
{
setOutput(i);
delayMicroseconds(motorSpeed);
}
} void setOutput(int out)
{
digitalWrite(motorPin1, bitRead(lookup[out], 0));
digitalWrite(motorPin2, bitRead(lookup[out], 1));
digitalWrite(motorPin3, bitRead(lookup[out], 2));
digitalWrite(motorPin4, bitRead(lookup[out], 3));
}
Arduino ULN2009驱动步进电机的更多相关文章
- arduino中驱动 步进电机
参考:https://www.arduino.cn/thread-75936-1-1.html 知识点: 步进电机是一种将电脉冲转化为角位移的执行机构.通俗一点讲:当步进驱动器接收到一个脉冲信号 ...
- FPGA驱动步进电机
步进电机 步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛.在非超载的情况下,电机的转速.停止的位置只取决于脉冲信号的频率和脉冲数,而不受 ...
- python代码实现树莓派3b+驱动步进电机
python代码实现树莓派3b+驱动步进电机 之前买了个树莓派,刚买回来那会儿热情高涨,折腾了一段时间,然后就放那吃灰了.前几天忽然想起来这个东西了,决定再玩玩儿,于是就从某宝上购买了一套步进电机.驱 ...
- 使用Arduino Nano驱动Lora模块
使用Arduino Nano驱动Lora模块 为什么选用Lora 射频通信芯片有很多种,但是一般在同样功耗下,距离没有Lora远;同等范围下,没有Lora节能. Lora通信只适用于低速率,高延时的场 ...
- Arduino+A4988驱动两相四线步进电机
先吐槽一下,在某宝买东西这么多年碰到的不靠谱的卖家也没这几天多.丝杆发短,42电机只有32大,碳杆上的鱼眼粘的没法再歪了还死紧……所以组装还得几天.于是先玩了一下DC-DC降压模块和A4988,规划了 ...
- 使用Pretues仿真Arduino驱动步进电机
这几天想做一个给金鱼自动喂食的装置,所以学习了下如何操控步进电机,现在做个记录. 使用Pretues仿真Arduino的话,可以参考:http://www.geek-workshop.com/thre ...
- arduino驱动步进电机
https://learn.adafruit.com/adafruit-motor-shield-v2-for-arduino/install-software 1安装库 Adafruit_Motor ...
- Arduino SPI驱动7引脚0.96寸OLED SSD1306 调试笔记
https://www.geek-workshop.com/thread-37818-1-1.html 2.下载最新库https://learn.adafruit.com/monoc ... ibra ...
- 使用STM32控制TMC5160驱动步进电机
首先先来了解一下TMC5160的3种工作模式 TMC5160通过两个引脚来控制它的工作模式:SD_MODE和SPI_MODE. 1.当SD_MODE接地,SPI_MODE拉高,TMC5160即工作在模 ...
随机推荐
- 【[Offer收割]编程练习赛 14 A】小Hi和小Ho的礼物
[题目链接]:http://hihocoder.com/problemset/problem/1505 [题意] [题解] 考虑Meet in the middle. 因为两个数的和不是很大; 直接用 ...
- 【codeforces 527D】Clique Problem
[题目链接]:http://codeforces.com/contest/527/problem/D [题意] 一维线段上有n个点 每个点有坐标和权值两个域分别为xi,wi; 任意一对点(i,j) 如 ...
- noip模拟赛 对刚
3 分析:约瑟夫环问题,可以用链表模拟做,也可以套用公式,比较水. #include <cmath> #include <cstdio> #include <cstrin ...
- What you can talk
data buffer who locked the account hash join cost memory and nested loop do not. How to make it hash ...
- IDFTP连不上FTP服务器的解决方法
使用IDFTP连不上FTP服务端. 原来是IDFTP有2种模式:主动模式和被动模式. IDFTP默认是使用主动模式,如果FTP服务端设置使用被动模式,使用IDFTP连不上FTP服务端的. 解决方法: ...
- apache zookeeper的安装
original article:http://zookeeper.praveendeshmane.co.in/zookeeper/zookeeper-3-4-6-single-server-setu ...
- 设计模式C++实现——外观模式
模式定义: 外观模式提供了一个统一的接口,用来訪问子系统中的一群接口.外观定义了一个高层接口,让子系统更easy使用. 模式结构: watermark/2/text/aHR0cDovL2Jsb2cuY ...
- 怎样在BIOS中设置RAID?
随着价格的下降和相应主板的支持.眼下SATA硬盘已经逐渐成为主流. 但因为受芯片组和操作系统的影响.不少用户对SATA硬盘的使用及安装系统掌握不足,今天小编就给大家介绍一下SATA硬盘的日常应用技巧. ...
- linux下查看监听port相应的进程
使用netstat查看进程PID [root@test ~]# netstat -anp|grep 5001 tcp 0 0 :::5001 :::* LISTEN 12886/java 之后各位看官 ...
- android測试工具MonkeyRunner--google官网翻译
近期在复习之前的笔记,在回想MonkeyRunner时看了看google官网的内容,写得不错.就翻译出来分享下.事实上google官网真是一个学习的好地方. 基础知识 MonkeyRunner工具提供 ...