相机标定与矫正opencv+MATLAB
博客转载自:http://blog.csdn.net/Loser__Wang/article/details/51811347
本文目的在于记录如何使用MATLAB做摄像机标定,并通过opencv进行校正后的显示。
首先关于校正的基本知识通过OpenCV官网的介绍即可简单了解:
http://docs.opencv.org/2.4/doc/tutorials/calib3d/camera_calibration/camera_calibration.html
对于摄像机我们所关心的主要参数为摄像机内参,以及几个畸变系数。上面的连接中后半部分也给了如何标定,然而OpenCV自带的标定程序稍显繁琐。因而在本文中我主推使用MATLAB的工具箱。下面让我们开始标定过程。
标定板
标定的最开始阶段最需要的肯定是标定板。两种方法,直接从opencv官网上能下载到:
http://docs.opencv.org/2.4/_downloads/pattern.png
{kind=link}
方法二:逼格满满(MATLAB)
J = (checkerboard(300,4,5)>0.5);
figure, imshow(J);
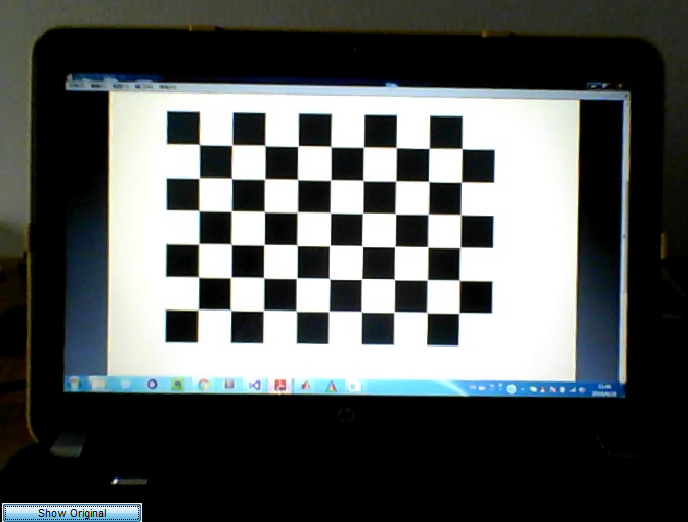
采集数据
那么有了棋盘格之后自然是需要进行照片了。不多说,直接上程序。按q键即可保存图像,尽量把镜头的各个角度都覆盖好。

#include "opencv2/opencv.hpp"
#include <string>
#include <iostream> using namespace cv;
using namespace std; int main()
{
VideoCapture inputVideo(0);
//inputVideo.set(CV_CAP_PROP_FRAME_WIDTH, 320);
//inputVideo.set(CV_CAP_PROP_FRAME_HEIGHT, 240);
if (!inputVideo.isOpened())
{
cout << "Could not open the input video " << endl;
return -1;
}
Mat frame;
string imgname;
int f = 1;
while (1) //Show the image captured in the window and repeat
{
inputVideo >> frame; // read
if (frame.empty()) break; // check if at end
imshow("Camera", frame);
char key = waitKey(1);
if (key == 27)break;
if (key == 'q' || key == 'Q')
{
imgname = to_string(f++) + ".jpg";
imwrite(imgname, frame);
}
}
cout << "Finished writing" << endl;
return 0;
}
保存大约15到20张即可。大家可以看到我的方法,直接对着实验室的屏幕拍摄的。这个阶段有个注意事项就是测量好屏幕上每个方格的大小,这个标定的时候会用到。

进行标定
直接而在MATLAB的Command Window里面输入cameraCalibrator即可调用标定应用。

首先先把之前照好的图像添加进去,这是出现:

这就是之前让你记录的标定板中每个方格的大小。 输入无误后就涉及到最关键的一步了(MATLAB的这个实在太方便了,都是傻瓜式操作),选择参数。
为什么说他关键呢,因为如果你仔细阅读了OpenCV的说明之后你会大概明白畸变参数,总共有五个,径向畸变3个(k1,k2,k3)和切向畸变2个(p1,p2)。
径向畸变

切向畸变

以及在OpenCV中的畸变系数的排列(这点一定要注意k1,k2,p1,p2,k3),千万不要以为k是连着的。

并且通过实验表明,三个参数的时候由于k3所对应的非线性较为剧烈。估计的不好,容易产生极大的扭曲,所以我们在MATLAB中选择使用两参数,并且选择错切和桶形畸变。

点击开始后等待一段时间即可完成标定。并且MATLAB给出的可视化还是很不错的,可以对比校正前后的样子

点击show Undistorted即可看到无畸变的图像
到这为止,你已经完成了标定过程。选择导出参数,即可把参数进行保存。

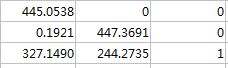
保存后可以退出标定应用,在MATLAB主界面中将保存的Mat文件打开
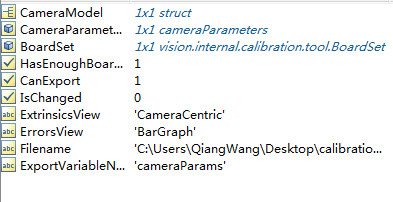
第二行就是参数
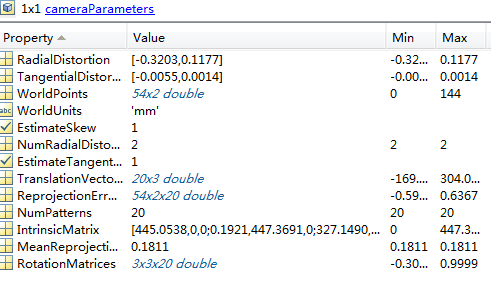
里面的RadialDistortion对应k1,k2,k3设置为0了。
TangentialDistortion对应p1,p2。
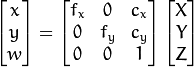
IntrinsicMatrix对应内参,注意这个和OpenCV中是转置的关系,注意不要搞错。
对应
OpenCV中查看标定的结果
#include "opencv2/opencv.hpp"
#include <iostream> using namespace cv;
using namespace std; int main()
{
VideoCapture inputVideo(0);
if (!inputVideo.isOpened())
{
cout << "Could not open the input video: " << endl;
return -1;
}
Mat frame;
Mat frameCalibration; inputVideo >> frame;
Mat cameraMatrix = Mat::eye(3, 3, CV_64F);
cameraMatrix.at<double>(0, 0) = 4.450537506243416e+02;
cameraMatrix.at<double>(0, 1) = 0.192095145445498;
cameraMatrix.at<double>(0, 2) = 3.271489590204837e+02;
cameraMatrix.at<double>(1, 1) = 4.473690628394497e+02;
cameraMatrix.at<double>(1, 2) = 2.442734958206504e+02; Mat distCoeffs = Mat::zeros(5, 1, CV_64F);
distCoeffs.at<double>(0, 0) = -0.320311439187776;
distCoeffs.at<double>(1, 0) = 0.117708464407889;
distCoeffs.at<double>(2, 0) = -0.00548954846049678;
distCoeffs.at<double>(3, 0) = 0.00141925006352090;
distCoeffs.at<double>(4, 0) = 0; Mat view, rview, map1, map2;
Size imageSize;
imageSize = frame.size();
initUndistortRectifyMap(cameraMatrix, distCoeffs, Mat(),
getOptimalNewCameraMatrix(cameraMatrix, distCoeffs, imageSize, 1, imageSize, 0),
imageSize, CV_16SC2, map1, map2); while (1) //Show the image captured in the window and repeat
{
inputVideo >> frame; // read
if (frame.empty()) break; // check if at end
remap(frame, frameCalibration, map1, map2, INTER_LINEAR);
imshow("Origianl", frame);
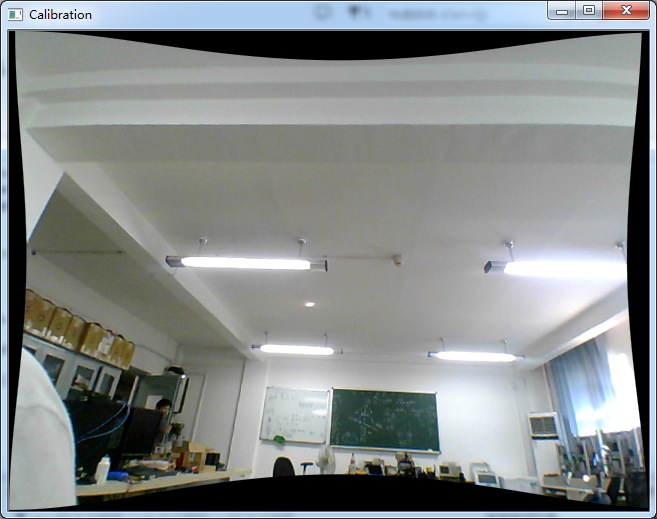
imshow("Calibration", frameCalibration);
char key = waitKey(1);
if (key == 27 || key == 'q' || key == 'Q')break;
}
return 0;
}
修复之前和之后的结果对比

还有就是之前讨论的为什么选2系数而不是3系数。因为。。。。。。。 下面是三系数的修正结果,惨不忍睹啊
相机标定与矫正opencv+MATLAB的更多相关文章
- 使用OpenCV进行相机标定
1. 使用OpenCV进行标定 相机已经有很长一段历史了.但是,伴随着20世纪后期的廉价针孔照相机的问世,它们已经变成我们日常生活的一种常见的存在.不幸的是,这种廉价是由代价的:显著的变形.幸运的是, ...
- 【视频开发】【计算机视觉】相机标定(Camera calibration)原理、步骤
相机标定(Camera calibration)原理.步骤 author@jason_ql(lql0716) http://blog.csdn.net/lql0716 在图像测量过程以及机器视觉应用 ...
- Camera Calibration 相机标定
Camera Calibration 相机标定 一.相机标定方法 在opencv中提供了一组函数用于实现相机的标定,标定返回的值包括:相机内参矩阵(fx fy xc yc).相机外参矩阵(R t)以及 ...
- 相机标定过程(opencv) + matlab参数导入opencv + matlab标定和矫正
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 辛苦原创所得,转载请注明出处 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% ...
- 相机标定 matlab opencv ROS三种方法标定步骤(1)
一 . 理解摄像机模型,网上有很多讲解的十分详细,在这里我只是记录我的整合出来的资料和我的部分理解 计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系,实际上就是要用矩阵来表 示各个 ...
- 相机标定 matlab opencv ROS三种方法标定步骤(2)
二 ubuntu下Opencv的相机标定 一般直接用Opencv的源码就可以进行相机的标定,但是可能只是会实现结果,却不懂实现的过程,我也是模模糊糊的看了<计算机视觉中的多视图几何>以及 ...
- 相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定 刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机, 要知道如何查看节点之间的流程图 rosrun r ...
- 相机标定问题-Matlab & Py-Opencv
一.相机标定基本理论 1.相机成像系统介绍 图中总共有4个坐标系: 图像坐标系:Op 坐标表示方法(u,v) Unit:Dots(个) 成像坐标系:Oi ...
- Opencv——相机标定
相机标定的目的:获取摄像机的内参和外参矩阵(同时也会得到每一幅标定图像的选择和平移矩阵),内参和外参系数可以对之后相机拍摄的图像就进行矫正,得到畸变相对很小的图像. 相机标定的输入:标定图像上所有内角 ...
随机推荐
- 【原创】Apache ab结果参数详解
解释如下: Server Software 服务器软件软件名称. Server Hostname 被测服务器的主机名. Server Port 被测试的Web服务器的监听端口. SSL/TLS Pro ...
- 七:Java之封装、抽象、多态和继承
本文章介绍了关于Java中的面向对象封装.抽象.继承.多态特点 Java面向对象主要有四大特性:封装.抽象.继承和多态. 一.封装 封装就是将抽象得到的数据和行为(或功能)相结合,形成一个有机的总体, ...
- shell基础--字符串和变量的操作
一.统计字符串长度 1.wc –L [root@~_~day4]# echo "hello" | wc -L 5 2.expr length string [root@~_~day ...
- R函数-时间序列ETS参数说明
alpha\beta\gamma分别代表水平.趋势.季节分量的平滑参数α.β.γ.这三个参数我们希望接近于0,以便于更平滑,即越小越平滑.在乘法模型的情况下,参数需要非常低,否则模型会对噪声太敏感. ...
- Oracle透明网关访问SQLServer数据库
针对oracle数据库不同实例之间的数据访问,我们可以直接通过dblink访问,如果oracle数据库想访问mysql/sqlserver等数据库的数据,我们可以通过配置oracle透明网关实现异构数 ...
- Angular7教程-01-Angular开发环境配置
本教程基于angular7(2018-11-04) 1. 安装node.js 下载地址: http://nodejs.cn/download/ 下载对应自己操作系统的版本安装即可. 2.安装 angu ...
- jQuery,js如何扩展自定义方法
(jQuery.fn.myMethod=function () { alert('myMethod'); }) (function ($) { $.fn.extend({ myMethod : fun ...
- jQuery----初识jQuery
一.jQuery好处: ①写得少,做的多 ②链式编程 ③隐式迭代 ④解决兼容性问题 二.顶级对象 Dom中的顶级对象:document------>页面中的顶级对象 document.点出来的是 ...
- PHP代码优化—array_push
PHP中数组插入数据通常有这么几种: 定义的时候直接赋值 $arr = array('apple', 'banana'); 使用数组变量操作 $arr = array(); $arr[] = 'app ...
- 【转】CSDN离线网页html文件自动跳转
问题: 最近使用OneNote2016剪辑csdn的文章时,发现一些公式/文本框不能被正确识别,所以离线保存网页的html文件. 但是每次打开html文件,都会自动跳转的CSDN主页,即使断网,也会自 ...