2D Convex Hulls and Extreme Points( Convex Hull Algorithms) CGAL 4.13 -User Manual
1 Introduction
A subset S⊆R2 is convex if for any two points p and q in the set the line segment with endpoints p and q is contained in S. The convex hull of a set S is the smallest convex set containing S. The convex hull of a set of points P is a convex polygon with vertices in P. A point in P is an extreme point (with respect to P) if it is a vertex of the convex hull of P. A set of points is said to be strongly convex if it consists of only extreme points.
This chapter describes the functions provided in CGAL for producing convex hulls in two dimensions as well as functions for checking if sets of points are strongly convex are not. There are also a number of functions described for computing particular extreme points and subsequences of hull points, such as the lower and upper hull of a set of points.
一个点集S⊆R2,如果对于点集中任意两个点 p 和 q ,以p 和q 为端点的线段被包在这个子集(构成的多边形)中,我们称S是凸的(convex )。一个点集S的凸包(convex hull )是包含S的最小凸集。一个点集P的凸包(convex hull )是一个以P中的点为顶点的多项式。如果P中一个点是其凸包(convex hull )中的一个顶点,则该点是一个P的极点(extreme point )。一个点集被称为强凸的(strongly convex )如果它只包含极点。
本章描述CGAL提供的在2维中生成凸包(convex hulls)的函数和用于检查点集是否强凸的(strongly convex )的函数。还有一些函数用于计算特定极点以及包(hull)生成之后的其他函数,如点集的下半包和上半包。
2 Convex Hull
CGAL provides implementations of several classical algorithms for computing the counterclockwise sequence of extreme points for a set of points in two dimensions (i.e., the counterclockwise sequence of points on the convex hull). The algorithms have different asymptotic running times and require slightly different sets of geometric primitives. Thus you may choose the algorithm that best fits your setting.
Each of the convex hull functions presents the same interface to the user. That is, the user provides a pair of iterators, first and beyond, an output iterator result, and a traits class traits. The points in the range [first, beyond) define the input points whose convex hull is to be computed. The counterclockwise sequence of extreme points is written to the sequence starting at position result, and the past-the-end iterator for the resulting set of points is returned. The traits classes for the functions specify the types of the input points and the geometric primitives that are required by the algorithms. All functions provide an interface in which this class need not be specified and defaults to types and operations defined in the kernel in which the input point type is defined.
Given a sequence of n input points with h extreme points, the function convex_hull_2() uses either the output-sensitive O(nh) algorithm of Bykat [5] (a non-recursive version of the quickhull [4] algorithm) or the algorithm of Akl and Toussaint, which requires O(nlogn) time in the worst case. The algorithm chosen depends on the kind of iterator used to specify the input points. These two algorithms are also available via the functions ch_bykat() and ch_akl_toussaint(), respectively. Also available are the O(nlogn) Graham-Andrew scan algorithm [3], [9] (ch_graham_andrew()), the O(nh) Jarvis march algorithm [8] (ch_jarvis()), and Eddy's O(nh)algorithm [6] (ch_eddy()), which corresponds to the two-dimensional version of the quickhull algorithm. The linear-time algorithm of Melkman for producing the convex hull of simple polygonal chains (or polygons) is available through the function ch_melkman().
CGAL提供了2d空间中的几种典型的算法来计算逆时针序的极点集(即凸包的逆时针序的点集)。各个算法有着不同的渐近线时间效率,需要稍有不同的几何元语集合。这样你可以选择最适合你的算法。
每个计算凸包的函数提供了相同的接口。用户提供一对 iterator , first和beyond,一个输出iterator result, 和一个traits类 traits。在范围[first, beyond)的点用于定义输入的需要计算其凸饭点集。逆时针序的极点集被写入了始于result的序列中,且最后一个点的(past-the-end)iterator被 返回。traits 类用于确定输入点的数的类型和算法所要求的几何元语集合。所有的函数提供了一个接口,使用这个接口时这个类不需要指定,输入点的缺省类型(All functions provide an interface in which this class need not be specified and defaults to types and operations defined in the kernel in which the input point type is defined)。
给定n个输入点的序列,其中有h个极点,
(1)Bykat 算法(output-sensitive O(nh) algorithm of Bykat, 一种quickhull算法的非回归版本),
(2)Akl 和 Toussaint算法,它们最差的情况下需要O(nlogn)时间。算法的选择依赖于指定的输入点集。这两个算法也可以通过ch_bykat() 和 ch_akl_toussaint()函数分别得到。
(3)Graham-Andrew 扫描算法(Graham-Andrew scan algorithm , (ch_graham_andrew()),)其算法时间为O(nlogn) 。
(4)Jarvis march算法(Jarvis march algorithm, (ch_jarvis()), O(nh))
(5)Eddy'算法(Eddy's O(nh)algorithm,ch_eddy()),它对应于quickhull算法的2维版本。
(6)Melkman 算法提供线性时间,为简单多边形链计算凸包(函数ch_melkman())
3 Example using Graham-Andrew's Algorithm
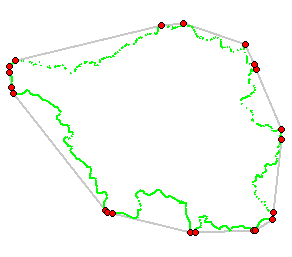
In the following example a convex hull is constructed from point data read from standard input using Graham_Andrew algorithm. The resulting convex polygon is shown at the standard output console. The same results could be achieved by substituting the function ch_graham_andrew() by other functions such as ch_bykat().
下面的例子使用标准输入点数据生成凸包,使用ch_graham_andrew()算法。其结果凸多边形输出到标准输出窗口。换函数ch_bykat()可得到相同结果。
File Convex_hull_2/ch_from_cin_to_cout.cpp
4 Extreme Points and Hull Subsequences
In addition to the functions for producing convex hulls, there are a number of functions for computing sets and sequences of points related to the convex hull.
The functions lower_hull_points_2() and upper_hull_points_2() provide the computation of the counterclockwise sequence of extreme points on the lower hull and upper hull, respectively. The algorithm used in these functions is Andrew's variant of Graham's scan algorithm [3], [9], which has worst-case running time of O(nlogn).
There are also functions available for computing certain subsequences of the sequence of extreme points on the convex hull. The function ch_jarvis_march() generates the counterclockwise ordered subsequence of extreme points between a given pair of points and ch_graham_andrew_scan() computes the sorted sequence of extreme points that are not left of the line defined by the first and last input points.
Finally, a set of functions (ch_nswe_point(), ch_ns_point(), ch_we_point(), ch_n_point(), ch_s_point(), ch_w_point(), ch_e_point()) is provided for computing extreme points of a 2D point set in the coordinate directions.
另外,还有一些函数用于与凸包相关的点集计算。
(1)lower_hull_points_2() 和 upper_hull_points_2()用于计算逆时针序的下半包和上半包。这个算法是Graham's scan algorithm的Andrew'变种,最差为O(nlogn);
(2)还有一些函数用于计算已经生成的凸包中的极点的子序列(subsequence )的函数。ch_jarvis_march()用于计算给定两点之间的逆时针序的极点的子序列,ch_graham_andrew_scan()用于生成一个逆时针排列的极点的子序列,这个子序列的所有极点均不在给定输入点的左侧。(computes the sorted sequence of extreme points that are not left of the line defined by the first and last input points.)
(3)最后,一个函数集用于计算给定坐标方向( coordinate directions)的极点集(ch_nswe_point(), ch_ns_point(), ch_we_point(), ch_n_point(), ch_s_point(), ch_w_point(), ch_e_point()).
5 Traits Classes
Each of the functions used to compute convex hulls or extreme points is parameterized by a traits class, which specifies the types and geometric primitives to be used in the computation. There are several implementations of 2D traits classes provided in the library. The class Convex_hull_traits_2 corresponds to the default traits class that provides the types and predicates presented in the 2-dimensional CGAL kernel in which the input points lie. The class Convex_hull_constructive_traits_2 is a second traits class based on CGAL primitives but differs from Convex_hull_traits_2 in that some of its primitives reuse intermediate results to speed up computation.
In addition, the 2D and 3D Linear Geometric Kernel provides three projective traits classes (Projection_traits_xy_3, Projection_traits_xz_3, and Projection_traits_yz_3), which may be used to compute the convex hull of a set of three-dimensional points projected into each of the three coordinate planes.
每个计算凸包或极点的函数都被一个traits类参数化,这个traits指定了计算中使用的类型和几何元语。库中有几个2D traits类。
(1)Convex_hull_traits_2 类对应于2D CGAL内核中缺省的traits 类,提供了类型和判定(The class Convex_hull_traits_2 corresponds to the default traits class that provides the types and predicates presented in the 2-dimensional CGAL kernel in which the input points lie. )。
(2)Convex_hull_constructive_traits_2类是第二个基于CGAL元语的traits类,与 Convex_hull_traits_2不同的是,它的元语复用了中间结果来加速计算。
(3)另外, 2D 和3D Linear Geometric Kernel 提供了三个投射traits类(projective traits classes ),分别是Projection_traits_xy_3, Projection_traits_xz_3, 的Projection_traits_yz_3,用于计算3维点投射到三个坐标平面的点集的凸包。
6 Convexity Checking
The functions is_ccw_strongly_convex_2() and is_cw_strongly_convex_2() check whether a given sequence of 2D points forms a (counter)clockwise strongly convex polygon. These are used in postcondition testing of the two-dimensional convex hull functions.
函数is_ccw_strongly_convex_2() 和is_cw_strongly_convex_2() 检查给定一个序列的2D点集是否形成一个(顺)逆时针的强凸多边形。这些函数用于对2维凸包函数的后置条件进行测试。
2D Convex Hulls and Extreme Points( Convex Hull Algorithms) CGAL 4.13 -User Manual的更多相关文章
- 2D and 3D Linear Geometry Kernel ( Geometry Kernels) CGAL 4.13 -User Manual
1 Introduction CGAL, the Computational Geometry Algorithms Library, is written in C++ and consists o ...
- 2D Polygons( Poygon) CGAL 4.13 -User Manual
1 Introduction A polygon is a closed chain of edges. Several algorithms are available for polygons. ...
- 2D Circular Geometry Kernel ( Geometry Kernels) CGAL 4.13 -User Manual
1 Introduction The goal of the circular kernel is to offer to the user a large set of functionalitie ...
- Android + OpenCV - Finding extreme points in contours
原文链接:http://answers.opencv.org/question/134783/android-opencv-finding-extreme-points-in-contours/ 导 ...
- 【UVa11426】GCD - Extreme (II)(莫比乌斯反演)
[UVa11426]GCD - Extreme (II)(莫比乌斯反演) 题面 Vjudge 题解 这.. 直接套路的莫比乌斯反演 我连式子都不想写了 默认推到这里把.. 然后把\(ans\)写一下 ...
- Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields(理解)
0 - 人体姿态识别存在的挑战 图像中的个体数量.尺寸大小.位置均未知 个体间接触.遮挡等影响检测 实时性要求较高,传统的自顶向下方法运行时间随着个体数越多而越长 1 - 整体思路 整个模型架构是自底 ...
- Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields(翻译)
0 - Abstract 我们提出了一种方法去在一张图片中有效地识别多个人体的2D姿势.这个方法使用了一个无参数表示法,我们将其叫为Part Affinity Fields(PAFs),其是去在图片中 ...
- R语言:多个因变量时,如何在plot函数中画多条曲线(plot,points,lines,legend函数)
最近阅读一篇文献<Regional and individual variations in the function of the human eccrine sweat gland>, ...
- Visible Lattice Points (莫比乌斯反演)
Visible Lattice Points 题意 : 从(0,0,0)出发在(N,N,N)范围内有多少条不从重合的直线:我们只要求gcd(x,y,z) = 1; 的点有多少个就可以了: 比如 : 点 ...
随机推荐
- vsftp上传文件出现553 Could not create file
没有权限创建文件或是目录,原因是selinux引起的登陆问题. 通过如下命令查看状态: > sestatus -b|grep ftp 设置allow_ftpd_full_access为on. 在 ...
- Raft 一致性算法论文译文
本篇博客为著名的 RAFT 一致性算法论文的中文翻译,论文名为<In search of an Understandable Consensus Algorithm (Extended Vers ...
- 03 解析库之Beautifulsoup模块
Beautifulsoup模块 一 介绍 Beautiful Soup 是一个可以从HTML或XML文件中提取数据的Python库.它能够通过你喜欢的转换器实现惯用的文档导航,查找,修改文档的方式 ...
- Jmeter Ant Task如果报告中有错误,在邮件内容里面直接显示出来 系列2
由于部门有多个项目,将自动化测试框架运用于多个项目时,希望针对每个项目修改的东西越少越好,为此,做如下修改: D:\apache-jmeter-2.7\extras\jmeter-results-de ...
- eclipse 远程调试mapreduce
使用环境:centos6.5+eclipse(4.4.2)+hadoop2.7.0 1.下载eclipse hadoop 插件 hadoop-eclipse-plugin-2.7.0.jar 粘贴到 ...
- Linux IPC 之信号量
信号量(也叫信号灯)是一种用于提供不同进程间或一个给定进程的不同线程间同步手段的原语. 信号量是进程/线程同步的一种方式,有时候我们需要保护一段代码,使它每次只能被一个执行进程/线程运行,这种工作就需 ...
- Type mismatch in value from map: expected org.apache.hadoop.io.longWritable
hadoop 编译的程序的报错 执行了命令: hadoop fs -put HTTP_20130313143750.dat /date.dochadoop jar MyDataCount.jar co ...
- qmake -简介
qmake 简化了在不同平台下开发项目时构建处理的过程. qmake 自动产生Makefiles文件,只需要几行信息来构建每个Makefile.qmake可以被用于任何软件项目,不管是否使用Qt. q ...
- 测试setsockopt设置超时是否生效代码
// 测试setsockopt设置超时是否生效代码 #include <arpa/inet.h> #include <netinet/in.h> #include <st ...
- [译]window.onerror事件
本文翻译youtube上的up主kudvenkat的javascript tutorial播放单 源地址在此: https://www.youtube.com/watch?v=PMsVM7rjupU& ...