ROS安装与卸载
1 版本选择
ROS 虽说也叫操作系统,但它是寄生在 LINUX 操作系统之下的,所以要求大兄弟你的电脑里至少要先有一个 LINUX 操作系统。
而对 ROS 兼容性最好的当属 Ubuntu 操作系统了,所以大兄弟,嘿嘿嘿,你自己看着办!
首先有一点需要说明,ROS是用来干“大事业”的,所以不推荐也不认同更不接受大家使用虚拟机。之前博主抱着玩一玩ROS的态度,在虚拟机里装了Ubuntu, 然后装ROS,结果,结果,结果被ROS给玩了...
1.1 Ubuntu 和 ROS 版本对应
即便是大兄弟用了Ubuntu,也是不能随便找一个版本的ROS装滴...
为啥呢,因为 Ubuntu 和 ROS 都是存在不同的版本滴,而且ROS各个版本之间还很接地气的(谁说的,打死他)互不兼容,所以每一个 ROS 版本都对应着一个或两个对应的 Ubuntu 版本。
具体咋对应的?请看:
| ROS发布日期 | ROS版本 | 对应Ubutnu版本 |
| 2016.3 |
ROS Kinetic Kame |
Ubuntu 16.04 (Xenial) / Ubuntu 15.10 (Wily) |
| 2015.3 |
ROS Jade Turtle |
Ubuntu 15.04 (Wily) / Ubuntu LTS 14.04 (Trusty) |
| 2014.7 |
ROS Indigo Igloo |
Ubuntu 14.04 (Trusty) |
| 2013.9 |
ROS Hydro Medusa |
Ubuntu 12.04 LTS (Precise) |
| 2012.12 |
ROS Groovy Galapagos |
Ubuntu 12.04 (Precise) |
| ... | ... | ... |
所以大兄弟,看到了吧,如果系统版本和ROS版本不对应,那是万万装不上滴。。。博主此处已嫩牛满面。。。
1.2 博主的配置
据博主的不完全统计(压根就没统计)的数据显示,现在学ROS的兄弟们普遍安装的是 Indigo 和 Hydro 版本, 但是现在已经时2016年啦,新的一年就要有新气象,所以,博主就能别人所不能(呵呵),安装了Kinetic。
具体配置如下:
华硕笔记本 + Windows 10 + Ubuntu 16.04 双系统
- Ubuntu 硬盘大小: 100G
- 内存: 8G
- 显卡: 也不是用来打dota, 所以随便啦啦啦~\(≧▽≦)/~啦啦啦
Ros版本:ROS Kinetic Kame
博主分别用过 Indigo 和 Kinetic,其实在使用过程中差距并不大,除了极少数第三方库,只支持 Indigo版本,毕竟 Kinetic 刚刚发布,存在一些第三方库还没有及时跟进啦。。。
2 开始安装
既然选定好版本,我们就开始安装啦!
前提还是大兄弟已经自己安装好了 Ubuntu 16.04 哦!如果是 Ubuntu 14.04,只需要把下面所有出现 *-kinetic-* 的地方换成 *-indigo-* 就好了。
2.1 软件中心配置
首先打开软件和更新对话框,具体可以在 Ubuntu 最左上角的搜索按钮中搜索。
打开后按照下图进行配置(确保你的"restricted", "universe," 和 "multiverse."前是打上勾的):
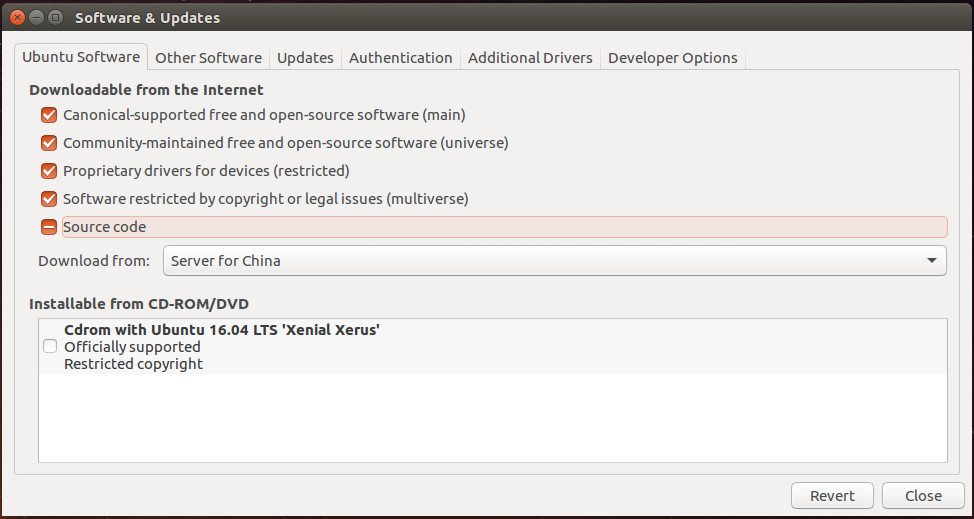
配置完成后就可以关闭该窗口了。
2.2 添加源
打开一个控制台(Ctrl + Alt + T), 输入如下指令:
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
设置秘钥:
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
2.3 安装 ROS
首先确保系统软件处于最新版
$ sudo apt-get update
然后我们就可以安装 ROS 啦,但是问题又出现了,ROS kinetic 也有很多版本,比如工业版,基础版,高级版,豪华版,至尊豪华...
既然我们想要学习ROS,那就安装至尊豪华全功能版吧,指令如下:
$ sudo apt-get install ros-indigo-desktop-full
好,打完指令,就可以整瓶啤酒,撸个烤串,看看电视消遣消遣,坐等ROS安装完成。
如果大兄弟家的网够快的话,没准分分钟就完事儿了。。。
...3...
...2...
...1...
倒数三个数,好,现在就当大兄弟安装完了,而且一切顺利,没有小虫子(BUG)粗现...
安装完成后,可以用下面的命令来查看可使用的包:
$ apt-cache search ros-indigo
到现在,虽然是安装完了,但是还不能用ROS哦,大兄弟别着急,心急吃不到豆腐...哦,是吃不到热豆腐...
2.4 初始化ROS
首先呢,需要先初始化 rosdep,嗯?这是啥?这不就是那个啥嘛,对吧,哈哈哈。。。⊙﹏⊙b汗
具体如下:
$ sudo rosdep init
$ rosdep update
然后初始化环境变量:
$ echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
上面两句非常非常非常重要,很多小伙伴在日常的开发过程中,有的找不到 Package, 找不到node, 很多情况下都是没有添加source, 这里展开说就有点跑偏了,如果小伙伴们遇到问题,可以在留言中提出来...
最后呢,对,这是最后的最后了,安装一个非常常用的插件:
$ sudo apt-get install python-rosinstall
好,到这里,所有安装就都完事啦。。哈哈哈。。为了保险,重启一下,测试测试我们的ROS吧....
对了,这里要提醒一下,ros中很多的第三方插件的安装格式是:
$ sudo apt-get install ros-indigo-...
例如:
$ sudo apt-get install ros-indigo-turtlebot*
3 创建工作空间
mkdir -p ~/catkin_ws/src
cd ..
catkin_make
cd
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
echo "source /home/<your dir>/catkin_ws/devel/setup.bash" >> ~/.bashrc
4 测试ROS
安装完了好歹要测试一下吧,不然怎么对的起那瓶啤酒啊...大兄弟,你还清醒吗...
首先,启动ROS环境
$ roscore
看看显示 started core service [/rosout] 了没有?如果没问题,恭喜大兄弟,你成功了。
什么?出问题了?那好吧,估计是啤酒喝多了,再从头来一遍吧,这次就别喝了。。。
这里链接一下我总结的ROS指令字典,大兄弟今后想查什么指令,直接看这个就好了
http://www.cnblogs.com/liu-fa/p/5761448.html
5 ROS卸载
sudo apt-get remove ros-*
ROS安装与卸载的更多相关文章
- ROS的安装和卸载
Robot Operating System (ROS) 是一个得到广泛应用机器人系统的软件框架,它包含了一系列的软件库和工具用于构建机器人应用.从驱动到最先进的算法,以及强大的开发者工具,ROS 包 ...
- ROS系统的安装以及卸载
ROS系统的安装 ROS系统的安装方式有两种,通过软件源和源码编译安装.软件源安装只需要通过简单的命令,因此,我们使用软件源来安装ROS 配置系统软件源 打开Ubuntu软件中心的软件源配置界面,勾选 ...
- ROS入门笔记(二):ROS安装与环境配置及卸载(重点)
ROS入门笔记(二):ROS安装与环境配置及卸载(重点) [TOC] 1 ROS安装步骤 1.1 ROS版本 ROS目前只支持在Linux系统上安装部署, 它的首选开发平台是Ubuntu. 发布时间 ...
- ROS学习笔记一:ROS安装与测试
1 Ubuntu和ROS版本的对应关系 Ubuntu 和 ROS 都存在不同的版本,其对应关系如下: 注:如果Ubuntu版本和ROS版本不对应的话,安装就不会成功了- 笔者安装的是Ubuntu14. ...
- C#创建、安装、卸载、调试Windows Service(Windows 服务)的简单教程
前言:Microsoft Windows 服务能够创建在它们自己的 Windows 会话中可长时间运行的可执行应用程序.这些服务可以在计算机启动时自动启动,可以暂停和重新启动而且不显示任何用户界面.这 ...
- 教你一招:解决win10/win8.1系统在安装、卸载软件时出现2502、2503错误代码的问题
经常遇到win10/win8.1系统在安装.卸载软件时出现2502.2503错误代码的问题. 解决办法: 1.打开任务管理器后,切换到“详细信息”选项卡,找到explore.exe这个进程,然后结束进 ...
- Android随笔之——静默安装、卸载
随笔之所以叫随笔,就是太随意了,说起来,之前的闹钟系列随笔还没写完,争取在十月结束之前找时间把它给写了吧.今天要讲的Android APK的静默安装.卸载.网上关于静默卸载的教程有很多,更有说要调用隐 ...
- Windows服务安装与卸载
Windows服务安装与卸载,使用到了InstallUtil.exe 安装: c: cd "C:\Windows\Microsoft.NET\Framework\v4.0.30319&quo ...
- Windows服务一:新建Windows服务、安装、卸载服务
Windows 服务(即,以前的 NT 服务)使您能够创建在它们自己的 Windows 会话中可长时间运行的可执行应用程序.这些服务可以在计算机启动时自动启动,可以暂停和重新启动而且不显示任何用户界面 ...
随机推荐
- day30 __new__ 以及单例模式
__new__ # __new__ # object.__new__() class A : def __init__(self): self.x = 1 print("init执行啦&qu ...
- C/C++ 各种进制的表示方法/ 进制前缀
C/C++ 各种进制的表示方法/ 进制前缀 来源 https://blog.csdn.net/qq_38282836/article/details/81784112 在C/C++ 中天然的支持除10 ...
- MT【205】寻找对称中心
函数$f(x)=\dfrac{x}{x+1}+\dfrac{x+1}{x+2}+\cdots+\dfrac{x+2018}{x+2019}$ 的图像的对称中心_____ 提示:根据定义域可知如果有对称 ...
- 自学Linux Shell9.3-基于Red Hat系统工具包:RPM属性依赖的解决方式-YUM在线升级
点击返回 自学Linux命令行与Shell脚本之路 9.3-基于Red Hat系统工具包:RPM属性依赖的解决方式-YUM在线升级 本节主要介绍基于Red Had的系统(测试系统centos) yum ...
- 安装 Minio服务
#MINIO SERVER Minio是在Apache License v2.0下发布的对象存储服务器.它与Amazon S3云存储服务兼容. 它最适合存储非结构化数据,如照片,视频,日志文件,备份和 ...
- suoi08 一收一行破 (tarjanLca+树状数组)
用一个差分树状数组维护一下每个深度的和,然后每次拿着路径端点和lca加一加减一减就行了 #include<bits/stdc++.h> #define pa pair<int,int ...
- 最长上升子序列LIS(51nod1134)
1134 最长递增子序列 基准时间限制:1 秒 空间限制:131072 KB 分值: 0 难度:基础题 收藏 关注 给出长度为N的数组,找出这个数组的最长递增子序列.(递增子序列是指,子序列的元素是递 ...
- rsync同步官方zabbix仓库搭建本地yum源
1.同步资源 # rsync -vrt rsync://repo.zabbix.com/mirror/zabbix/3.4/rhel/7/x86_64/ /home/mirrors/zabbix/3. ...
- BSGS&EXBSGS 大手拉小手,大步小步走
大步小步走算法处理这样的问题: A^x = B (mod C) 求满足条件的最小的x(可能无解) 其中,A/B/C都可以是很大的数(long long以内) 先分类考虑一下: 当(A,C)==1 即A ...
- 获取get值&DOM例题
获取get值: <body> <form action="9.26获取get值.html" method="get"> ...