ROS-Rviz-turtlebot3仿真信息查看
前言:Rviz是ROS自带的一种3D可视化工具。
一、安装turtlebot3功能包
1.1 安装依赖包
sudo apt-get install ros-kinetic-joy ros-kinetic-teleop-twist-joy ros-kinetic-teleop-twist-keyboard ros-kinetic-laser-proc ros-kinetic-rgbd-launch ros-kinetic-depthimage-to-laserscan ros-kinetic-rosserial-arduino ros-kinetic-rosserial-python ros-kinetic-rosserial-server ros-kinetic-rosserial-client ros-kinetic-rosserial-msgs ros-kinetic-amcl ros-kinetic-map-server ros-kinetic-move-base ros-kinetic-urdf ros-kinetic-xacro ros-kinetic-compressed-image-transport ros-kinetic-rqt-image-view ros-kinetic-gmapping ros-kinetic-navigation
1.2 安装功能包
cd ~/catkin_ws/src/ git clone https://github.com/ROBOTIS-GIT/turtlebot3.git git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git cd ~/catkin_ws && catkin_make
二、仿真并查看
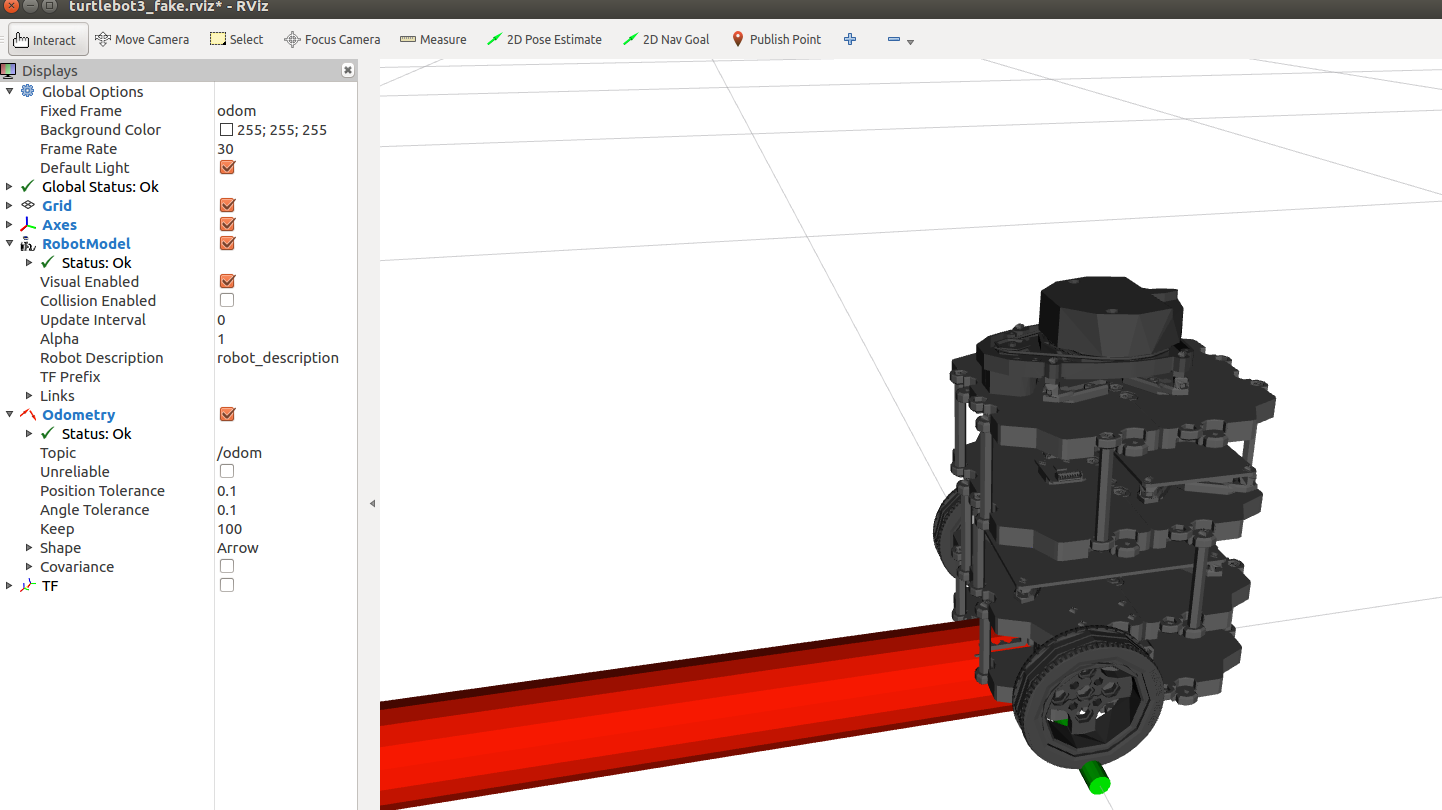
2.1 加载三维模型
cd /home/cdq/catkin_ws/src/turtlebot3_simulations/turtlebot3_fake/launch
export TURTLEBOT3_MODEL=burgerroslaunch turtlebot3_fake.launch
----------------------------------------
解析:
第二条是设置环境变量。
第三条运行了tur tlebot3_fake_node节点(三维模型)和robot_state_publisher节点(发布车轮信息)。
显示如下:
2.2 开启控制命令
启用命令后可以用wasd控制方向。
cd ~/catkin_ws/src/turtlebot3/turtlebot3_teleop/launch export TURTLEBOT3_MODEL=burger roslaunch turtlebot3_teleop_key.launch
----------------------------------
命令解析:
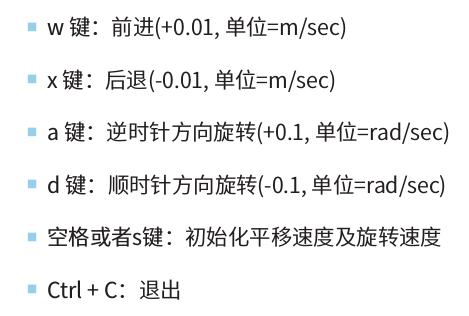
显示如下:
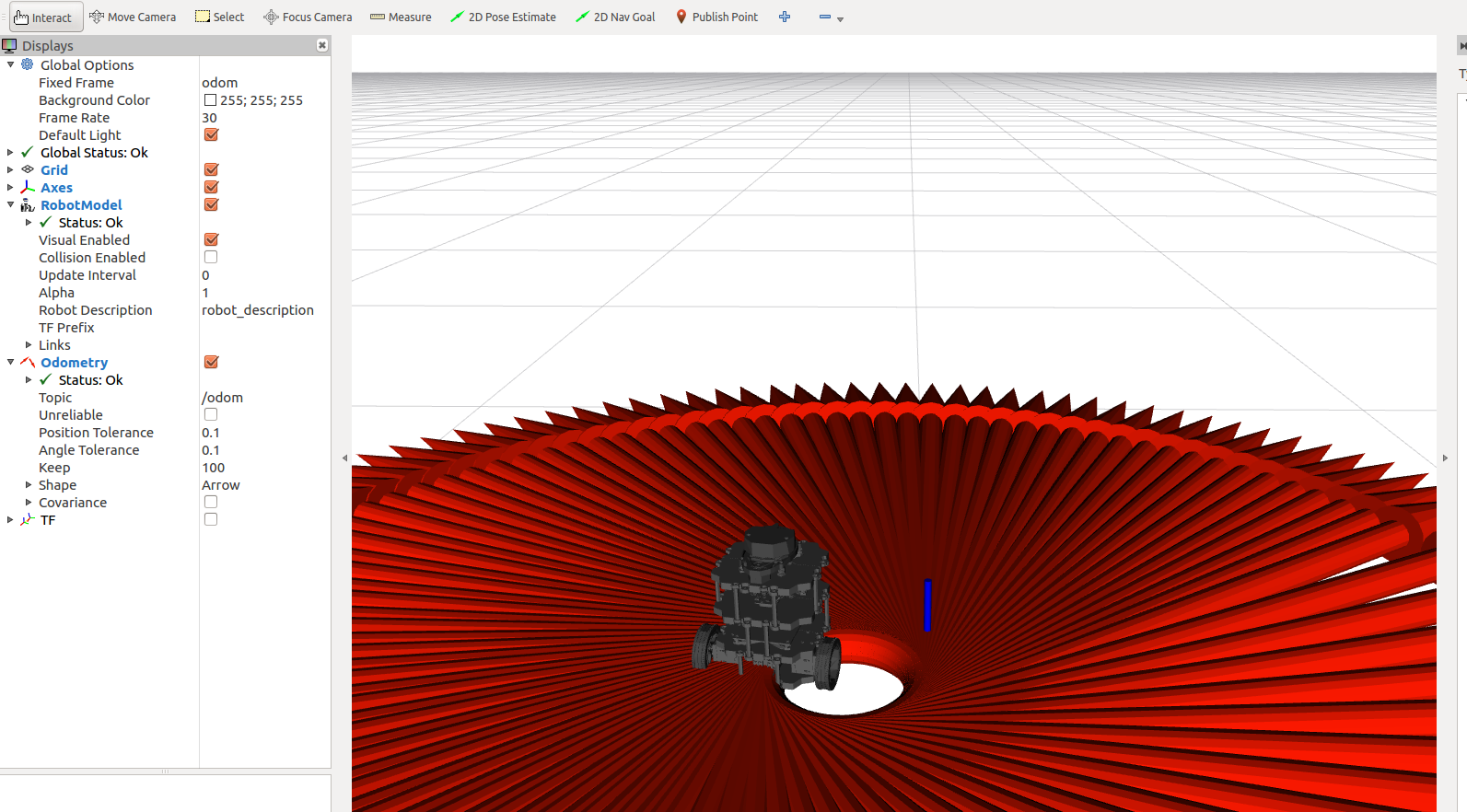
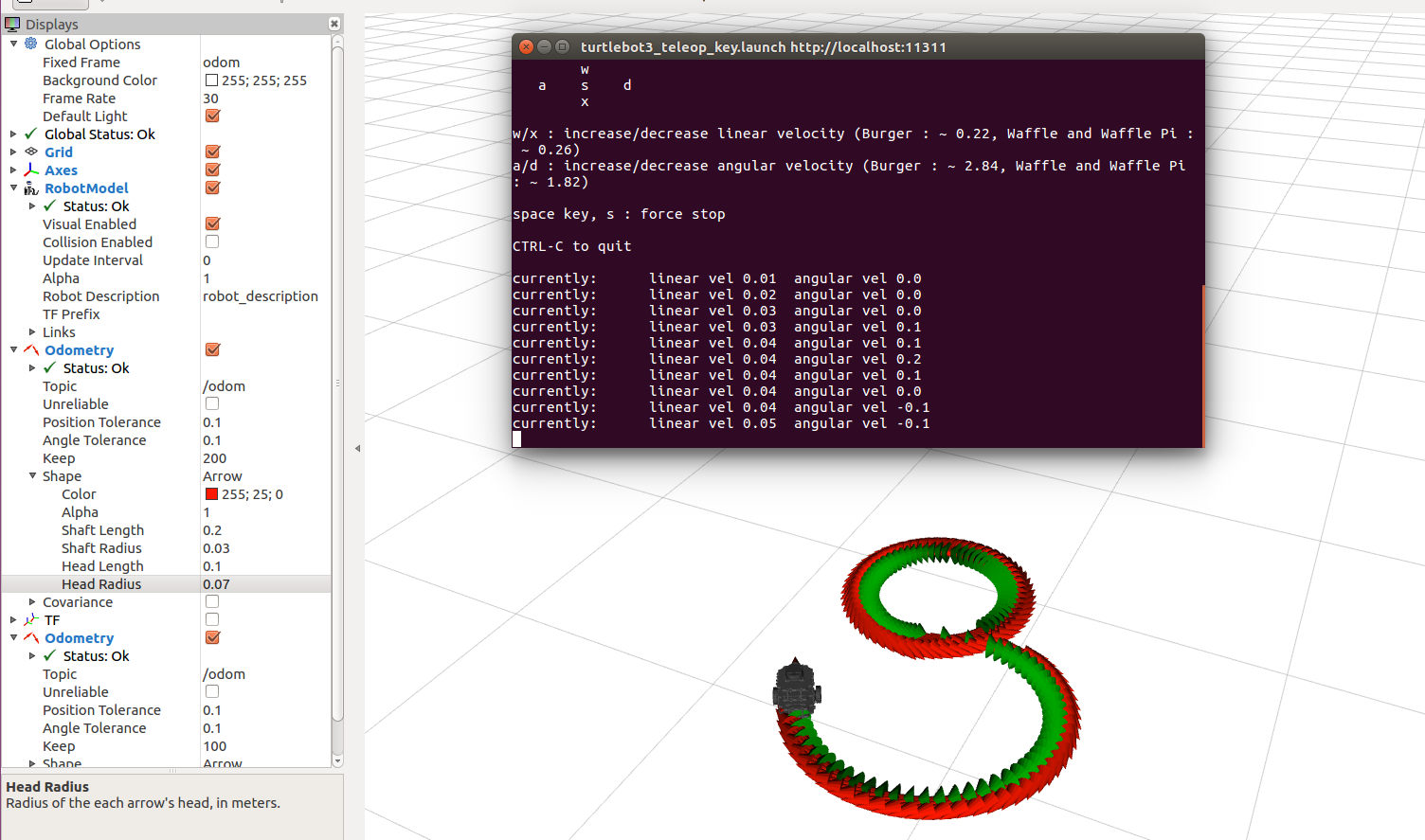
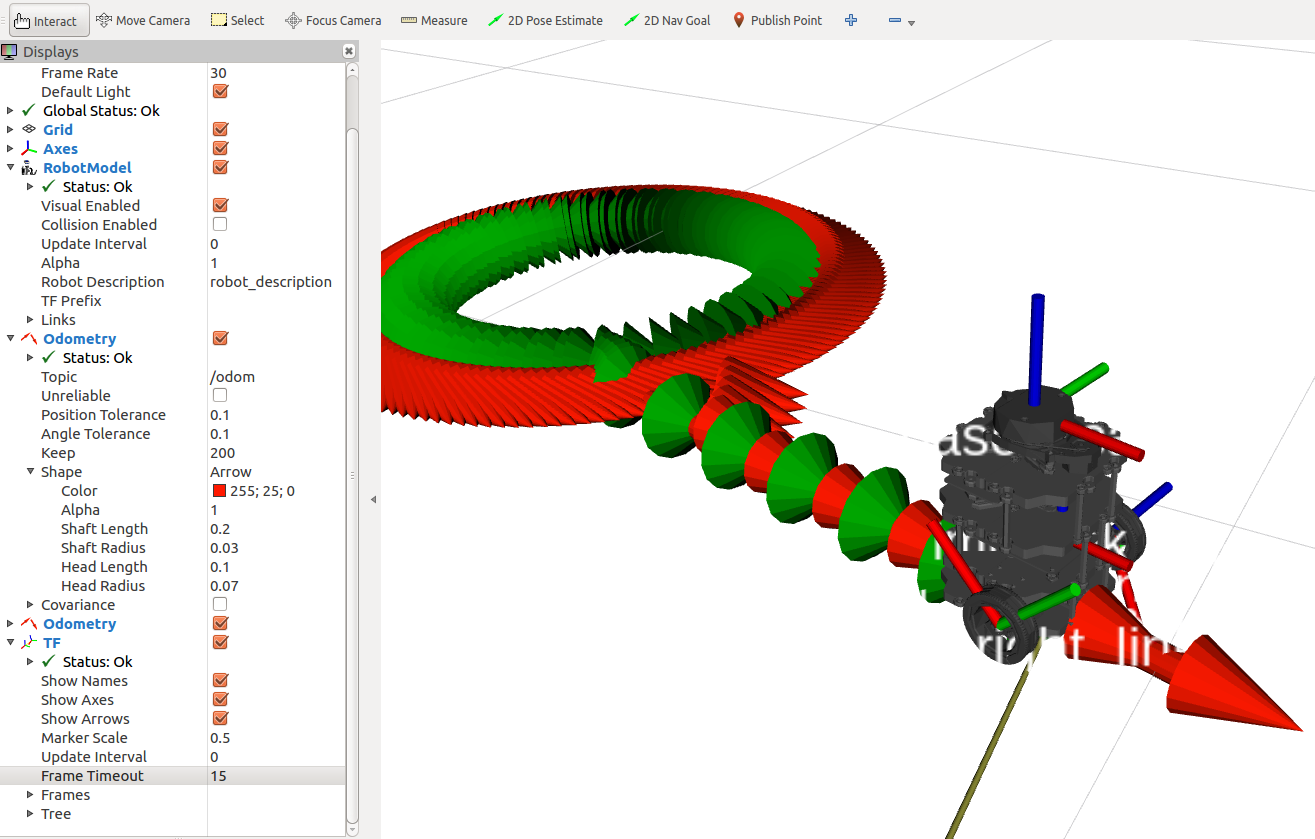
2.3 添加里程计信息
ADD->By Topic->Odometry
初始箭头很大,按图调整一下:
ADD->TF
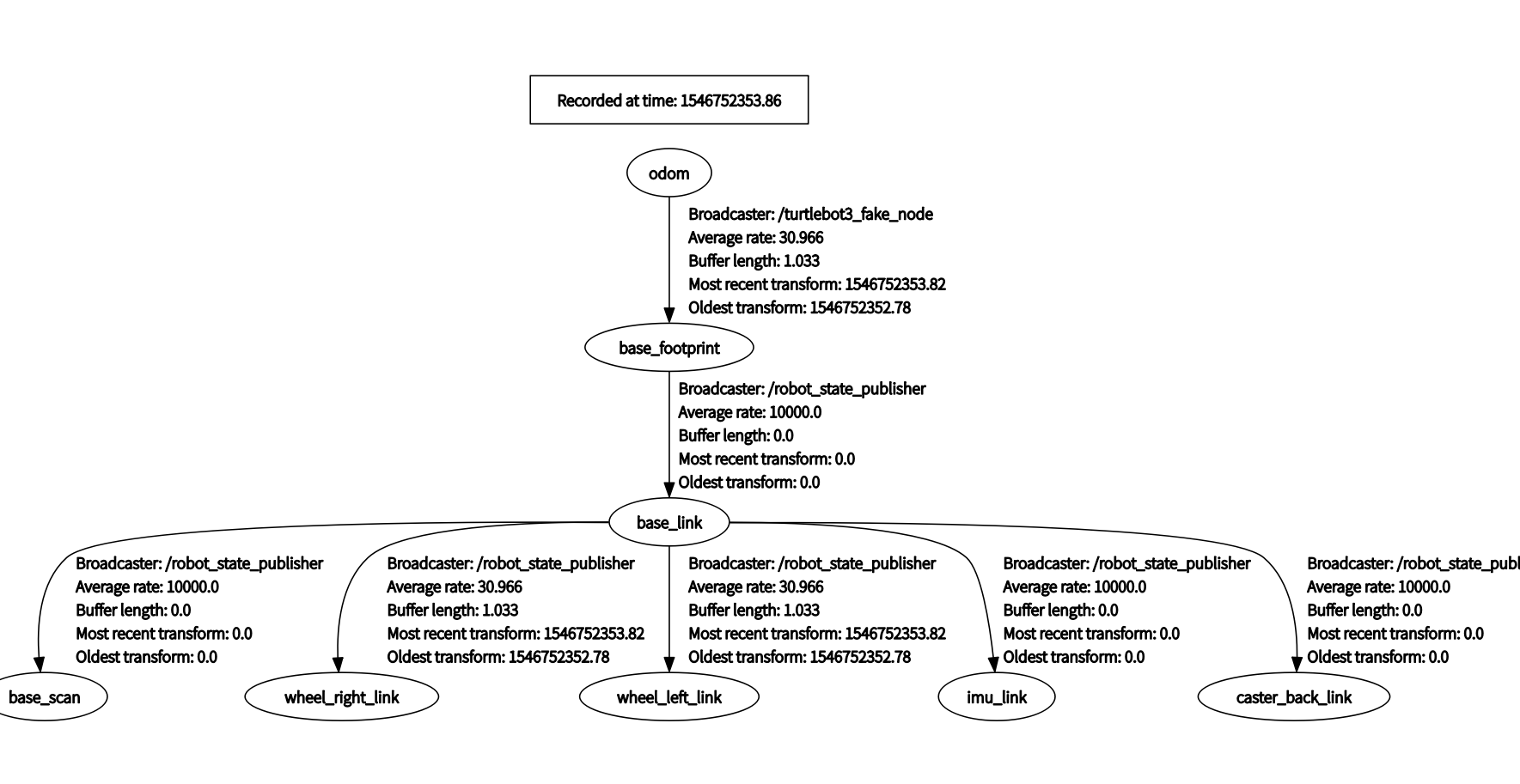
通过rqt_tf_tree查看tf话题
rosrun rqt_tf_tree rqt_tf_tree
-------------------------------------------
显示如下:
-END-
ROS-Rviz-turtlebot3仿真信息查看的更多相关文章
- Ubuntu 18.04 + ROS Melodic + TurtleBot3仿真
1. 下载安装包 官网地址: http://wiki.ros.org/action/show/Robots/TurtleBot?action=show&redirect=TurtleBot 所 ...
- ROS(indigo)_turtlebot仿真示例包括stage和gazebo
ROS(indigo)_turtlebot仿真示例包括stage和gazebo 现上参考网址: turtlebot:http://wiki.ros.org/Robots/TurtleBot stage ...
- 11g RAC集群启动关闭、各种资源检查、配置信息查看汇总。
简要:一:集群的启动与关闭 1. rac集群的手动启动[root@node1 bin]# ./crsctl start cluster -all2. 查看rac集群的状态[root@node1 bin ...
- node-webkit教程(13)gpu支持信息查看
node-webkit教程(13)gpu支持信息查看 文/玄魂 目录 node-webkit教程(13)gpu支持信息查看 前言 13.1操作步骤 (一)打开node-webkit,输入chrome: ...
- oracle10g 统计信息查看、收集
1. 统计信息查看 1.1 单个表的全局统计信息.统计效果查看 2. 统计信息分析(收集) 2.1 分析工具选择 2.2 分析前做index重建 2.3 分析某数据表,可以在PL/SQL的comm ...
- 【Python】 系统配置/进程等信息查看 psutil
psutil 原以为psutil只是跟进程有关的一个模块,没想到它其实提供了从CPU到内存各种各样的信息,十分IMBA.记录一下 我用了pip install psutil安装的这个模块,不过路中遇到 ...
- ROS(indigo)_pr2_simulator仿真(gazebo)示例
ROS(indigo)_pr2_simulator仿真(gazebo)示例 1 开启pr2仿真 ~$ roslaunch gazebo_ros empty_world.launch ~$ roslau ...
- linux基础之用户登录信息查看命令
用户登录信息查看命令 1.who命令 同一个账号通过不同终端登录也属于不同的登录信息,这里不同的终端包含虚拟终端和模拟终端,因为一个用户通过一个终端登录属于一个session 基本介绍 打印当前系统上 ...
- extract_by_one 根据二维数组中某字段来提取数组信息,查看有无重复信息
public function tt(){ $param = array( array ( 'hykno' => '2222222-CB', 'tcdk_fid' => '458B6D70 ...
随机推荐
- 数据结构——栈的实现(数组、Java)
巩固数据结构 栈是一种有限制的线性表 只能对表尾进行操作 package com.shine.test.datastruct; import java.util.Arrays; public clas ...
- 最小环 hdu1599 poj1734
最小环用floyd改编. hdu1599特殊一些.要求至少有三个不同的点,并且除了起点与终点重合外,中间不能有环.有点很奇怪,最大值不能为0x3f3f3f3f. poj1374就没那么讲究. //hd ...
- 【Oracle】开、关、删归档日志(archivelog)
归档日志:当redo日志发生切换时,归档进程(ARCn)会把redo日志自动归档,产生归档日志. 1.启动归档模式 –确定数据库为非归档模式 SYS@LGR> archive log list; ...
- win7利用tsmmc.msc远程管理工具
win7和xp默认不带tsmmc.msc远程管理工具.我们只需要从2003的windows\system32目录下复制 mstsmhst.dll ,mstsmmc.dll 和tsmmc.msc文件放到 ...
- 文件IO详解(四)---标准输入、标准输出和标准错误
每个进程都会默认打开3个文件描述符,即0.1.2.其中0代表标准输入流.1代表标准输出流.2代表标准错误流.通常标准输入流对应着键盘的设备文件.标准输出流和错误流对应着显示器的设备文件.在编程中通常使 ...
- js 正则 测试
var str0 = '2013-6-7()'; var AAAAADD = str0.match(/(\d)/g); //11个空字符串 //["2", "0" ...
- VMware虚拟机共享文件夹问题: /mnt下没有hgfs文件夹
在使用vmware虚拟机共享文件夹功能的时候,发现在/mnt目录下面没有hgfs文件夹,但是vmware-tool的命令vmhgfs-fuse确实存在于系统中.在使用vmhgfs-fuse建立宿主机到 ...
- Redis详解入门篇(转载)
Redis详解入门篇(转载) [本教程目录] 1.redis是什么2.redis的作者3.谁在使用redis4.学会安装redis5.学会启动redis6.使用redis客户端7.redis数据结构 ...
- SQL SEVER (ROLLUP与CUBE,ROW_NUMBER())使用方法
1.建立测试专用数据: if object_id('TESTDB') is not null drop table TESTDB ), B INT) insert into TESTDB union ...
- 商品的CRUD操作
(1)新增商品:新增文档,建立索引 PUT /index/type/id{ "json数据"} PUT /ecommerce/product/1{ "name" ...