Crashing Robots
Description
A robot crashes with a wall if it attempts to move outside the area of the warehouse, and two robots crash with each other if they ever try to occupy the same spot.
Input
The second line contains two integers, 1 <= N, M <= 100, denoting the numbers of robots and instructions respectively.
Then follow N lines with two integers, 1 <= Xi <= A, 1 <= Yi <= B and one letter (N, S, E or W), giving the starting position and direction of each robot, in order from 1 through N. No two robots start at the same position.
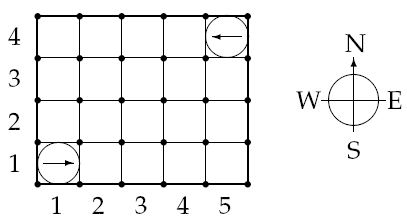
Figure 1: The starting positions of the robots in the sample warehouse
Finally there are M lines, giving the instructions in sequential order.
An instruction has the following format:
< robot #> < action> < repeat>
Where is one of
- L: turn left 90 degrees,
- R: turn right 90 degrees, or
- F: move forward one meter,
and 1 <= < repeat> <= 100 is the number of times the robot should perform this single move.
Output
- Robot i crashes into the wall, if robot i crashes into a wall. (A robot crashes into a wall if Xi = 0, Xi = A + 1, Yi = 0 or Yi = B + 1.)
- Robot i crashes into robot j, if robots i and j crash, and i is the moving robot.
- OK, if no crashing occurs.
Only the first crash is to be reported.
Sample Input
4
5 4
2 2
1 1 E
5 4 W
1 F 7
2 F 7
5 4
2 4
1 1 E
5 4 W
1 F 3
2 F 1
1 L 1
1 F 3
5 4
2 2
1 1 E
5 4 W
1 L 96
1 F 2
5 4
2 3
1 1 E
5 4 W
1 F 4
1 L 1
1 F 20
Sample Output
Robot 1 crashes into the wall
Robot 1 crashes into robot 2
OK
Robot 1 crashes into robot 2
解释一下输入输出
这是一个机器人跑动的问题,给出机器人坐标和场地范围,以及行动指令;如果撞墙或者撞到其它机器人就停止(注意,输入要完成)
输入:4是4组数据
#include<cstdio>
#include<cstring>
#include<iostream>
using namespace std ;
int len,high;
int a,b,j ;
struct node
{
int x;
int y ;
int dire;
} s[];
int judge(int k)
{
int i;
if(s[k].x > len||s[k].x< ||s[k].y>high||s[k].y<)
{
printf("Robot %d crashes into the wall\n",k);
return ;
}
for(i = ; i <= a ; i++)
{
if(i == k)
continue;
if(s[i].x == s[k].x&&s[i].y == s[k].y)
{
printf("Robot %d crashes into robot %d\n",k,i);
return ;
}
}
return ;
}
int main()
{
int n ;
cin>>n;
for(int i = ; i <= n ; i++)
{
cin>>len>>high;
cin>>a>>b ;
char dire ;
for(j = ; j <= a ; j++)
{
cin>>s[j].x>>s[j].y>>dire;
if(dire == 'N')
s[j].dire = ;
if(dire == 'W')
s[j].dire = ;
if(dire == 'S')
s[j].dire = ;
if(dire == 'E')
s[j].dire = ;
}
int num,repeat,flag = ;
char order ;
for(j = ; j <= b ; j++)
{
cin>>num>>order>>repeat ;
for(int h = ; h <= repeat ; h++ )//把这个放在外边是为了底下的左右指令时比较好处理
{
if(order == 'F')
{
if(s[num].dire == )
{
s[num].y++ ;
if(!judge(num))
{
flag = ;
break ;
}
}
else if(s[num].dire == )
{
s[num].x--;
if(!judge(num))
{
flag = ;
break ;
}
}
else if(s[num].dire == )
{
s[num].y--;
if(!judge(num))
{
flag = ;
break ;
}
}
else if(s[num].dire == )
{
s[num].x++ ;
if(!judge(num))
{
flag = ;
break ;
}
}
}
if(order == 'L')
s[num].dire = (+s[num].dire)% ;
if(order == 'R')
s[num].dire = (s[num].dire-+)%;
}
if(flag == )
break ;
}
if(j < b)
for(++j ; j <= b ; j++)
cin>>num>>order>>repeat ;
if(flag == )
printf("OK\n");
}
return ;
}
Crashing Robots的更多相关文章
- poj2632 Crashing Robots
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 9859 Accepted: 4209 D ...
- Crashing Robots(imitate)
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 8124 Accepted: 3528 D ...
- 模拟 POJ 2632 Crashing Robots
题目地址:http://poj.org/problem?id=2632 /* 题意:几个机器人按照指示,逐个朝某个(指定)方向的直走,如果走过的路上有机器人则输出谁撞到:如果走出界了,输出谁出界 如果 ...
- Crashing Robots 分类: POJ 2015-06-29 11:44 10人阅读 评论(0) 收藏
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 8340 Accepted: 3607 D ...
- poj 2632 Crashing Robots
点击打开链接 Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 6655 Accepted: ...
- Poj OpenJudge 百练 2632 Crashing Robots
1.Link: http://poj.org/problem?id=2632 http://bailian.openjudge.cn/practice/2632/ 2.Content: Crashin ...
- POJ2632——Crashing Robots
Crashing Robots DescriptionIn a modernized warehouse, robots are used to fetch the goods. Careful pl ...
- POJ 2632 Crashing Robots (坑爹的模拟题)
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 6599 Accepted: 2854 D ...
- Crashing Robots(水题,模拟)
1020: Crashing Robots 时间限制(普通/Java):1000MS/10000MS 内存限制:65536KByte 总提交: 207 测试通过:101 ...
- HDU 2300 Crashing Robots
Crashing Robots 题意 模拟多个机器人在四个方向的移动,检测crash robot, crash wall, OK这些状态 这是个模拟题需要注意几点: 理解转变方向后移动多少米,和转动方 ...
随机推荐
- JWS-webservice 与Axis2-webservice的高速实现
在详细介绍这两种框架下的webservice之前,先跟大家交流一下SOA认识,也就是面向服务的体系结构.SOA所要解决的主要问题是在现有基础环境的前提下,通过对现有应用程序和基础结构进行又一次的组合以 ...
- shell脚本实现冒泡排序 分类: 学习笔记 linux ubuntu 2015-07-10 14:16 79人阅读 评论(0) 收藏
手动输入一行字符串,并对其排序. 脚本如下: #!/bin/bash #a test about sort echo "please input a number list" re ...
- CentOS 6.7增加SWAP交换分区
任务:新增一个1GB的SWAP分区,并开机自动挂载 1.在/var目录下新增SWAPFILE交换区文件 2.生成SWAP分区 mkswap /var/SWAPFILE 3.激活SWAP分区 swapo ...
- js兼容各个浏览器的复制功能
看似简单的复制功能,用js做起来竟然遇到各种情况.刚开始在网上搜索到复制功能的几种实现方法,但是都不兼容.最后还是用的插件代码如下 html模板 <tr> <td>1</ ...
- RSA签名验签
import android.util.Base64; import java.security.KeyFactory; import java.security.PrivateKey; import ...
- Android开发手记(25) 简单Service的实现
本文将通过实现一个简单的Service发送简单消息,然后通过一个BroadcastReceiver接收Service发送的消息,从而改变一个TextView的文本颜色. 这里,我们需要三个java文件 ...
- android Services注意地方
使用service前需要在manifest声明: <manifest ... > ... <application ... > <service android:name ...
- Linq 调试
void Main() { var MyMonitor = new Devart.Data.Oracle.OracleMonitor(); MyMonitor.IsActive = true; var ...
- 【转】iOS开发6:UIActionSheet与UIAlertView
原文: http://my.oschina.net/plumsoft/blog/42763 iOS程序中的Action Sheet就像Windows中的 “确定-取消”对话框一样,用于强制用户进行选择 ...
- 关于ios8斯坦福公开课第二课
在这个课程中,我们遇到了这样的代码 @IBAction func oprate(sender: UIButton) { let opration = sender.currentTitle! if u ...