ros kinect calibration
RGB camera
Bring up the OpenNI driver:
roslaunch openni_launch openni.launch
Now follow the standard monocular camera calibration instructions. Use the following command (substituting the correct dimensions of your checkerboard):
rosrun camera_calibration cameracalibrator.py image:=/camera/rgb/image_raw camera:=/camera/rgb --size 5x4 --square 0.0245
Don't forget to Commit your successful calibration.
IR (depth) camera
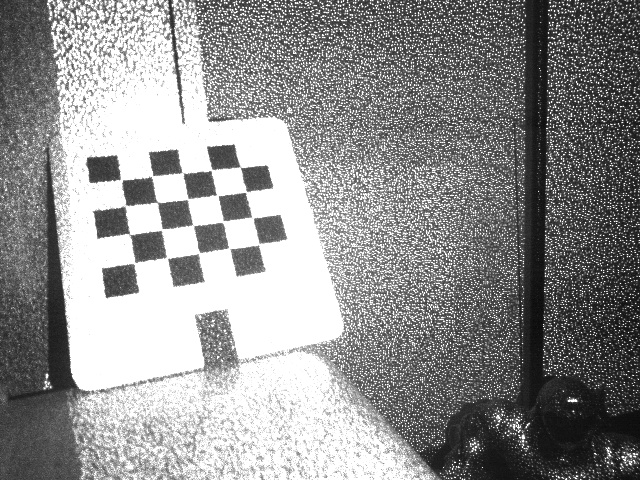
The Kinect detects depth by using an IR camera and IR speckle projector as a pseudo-stereo pair. We will calibrate the "depth" camera by detecting checkerboards in the IR image, just as we calibrated the RGB camera.
The speckle pattern makes it impossible to detect the checkerboard corners accurately in the IR image. The simplest solution is to cover the projector (lone opening on the far left) with one or two Post-it notes, mostly diffusing the speckles. An ideal solution is to block the projector completely and provide a separate IR light source. Good illumination sources include sunlight, halogen lamps, or incandescent lamps.
|
|
|
|
IR with speckle pattern |
IR with projector covered by Post-it note |

As before, follow the monocular camera calibration instructions:
rosrun camera_calibration cameracalibrator.py image:=/camera/ir/image_raw camera:=/camera/ir --size 5x4 --square 0.0245
The Kinect camera driver cannot stream both IR and RGB images. It will decide which of the two to stream based on the amount of subscribers, so kill nodes that subscribe to RGB images before doing the IR calibration.
Don't forget to Commit your successful calibration.
Where are the intrinsics saved?
When you click Commit, cameracalibrator.py sends the new calibration to the camera driver as a service call. The driver immediately begins publishing the updated calibration on its camera_info topic.
openni_camera uses camera_info_manager to manage calibration parameters. By default, it saves intrinsics to $HOME/.ros/camera_info/NAME.yaml and identifies them by the device serial number:
$ ls ~/.ros/camera_info/
depth_B00362708888047B.yaml rgb_B00362708888047B.yaml
Whenever you bring up the OpenNI driver, it will look for a previously saved calibration. If you want to share the intrinsics among multiple users, move them somewhere public (e.g. /public/path/) and use a launch file which configures the camera info URLs:
<launch> <!-- Include official launch file and specify camera_info urls -->
<include file="$(find openni_launch)/launch/openni.launch">
<!-- provide arguments to that launch file -->
<arg name="rgb_camera_info_url"
value="file:///public/path/rgb_B00362708888047B.yaml" />
<arg name="depth_camera_info_url"
value="file:///public/path/depth_B00362708888047B.yaml" />
</include> </launch>
Wiki: openni_launch/Tutorials/IntrinsicCalibration (last edited 2015-02-06 01:36:34 by AlexanderReimann)
http://wiki.ros.org/openni_launch/Tutorials/IntrinsicCalibration
使用ls ~/.ros/camera_info/之后,发现有7个.yaml后缀文件。使用cat ~/.ros/camera_info/1.yaml
image_width:
image_height:
camera_name: head_camera
camera_matrix:
rows:
cols:
data: [370.515976248363, , 313.8790868840471, , 372.6830969227434, 231.7153990263267, , , ]
distortion_model: plumb_bob
distortion_coefficients:
rows:
cols:
data: [-0.3004104519610615, 0.07652258370676726, -0.001477826771302646, -0.001199374872901745, ]
rectification_matrix:
rows:
cols:
data: [, , , , , , , , ]
projection_matrix:
rows:
cols:
data: [270.0549621582031, , 307.5854707490471, , , 317.0104064941406, 226.6749221178361, , , , , ]xiaoqiang@xiaoqiang-desktop:~$
2.yaml
image_width:
image_height:
camera_name: head_camera
camera_matrix:
rows:
cols:
data: [366.8006737481114, , 313.2319307503966, , 369.4691705536239, 225.8932701116596, , , ]
distortion_model: plumb_bob
distortion_coefficients:
rows:
cols:
data: [-0.2955066415987022, 0.07398741879692314, 0.001109057089446478, 0.0005550013886223383, ]
rectification_matrix:
rows:
cols:
data: [, , , , , , , , ]
projection_matrix:
rows:
cols:
data: [267.2522277832031, , 310.626720252556, , , 314.1973266601562, 220.8795998314854, , , , , ]xiaoqiang@xiaoqiang-desktop:~$
3.yaml
image_width:
image_height:
camera_name: head_camera
camera_matrix:
rows:
cols:
data: [367.7203842386191, , 312.1633776999364, , 369.8504643810227, 222.327969033836, , , ]
distortion_model: plumb_bob
distortion_coefficients:
rows:
cols:
data: [-0.3028043701396974, 0.08016316913146398, 0.001972259854054233, -0.0005855105383069578, ]
rectification_matrix:
rows:
cols:
data: [, , , , , , , , ]
projection_matrix:
rows:
cols:
data: [271.3121643066406, , 309.4569959074397, , , 313.3587341308594, 216.6703090559513, , , , , ]xiaoqiang@xiaoqiang-desktop:~$
4.yaml
image_width:
image_height:
camera_name: head_camera
camera_matrix:
rows:
cols:
data: [374.4079261743749, , 312.6902058006406, , 377.1063870868036, 231.8591658323552, , , ]
distortion_model: plumb_bob
distortion_coefficients:
rows:
cols:
data: [-0.3010382975004438, 0.07439561116406565, -0.001492430415890119, -0.0003780448972454258, ]
rectification_matrix:
rows:
cols:
data: [, , , , , , , , ]
projection_matrix:
rows:
cols:
data: [271.7996520996094, , 307.0881469125889, , , 321.7455749511719, 226.9183813513646, , , , , ]xiaoqiang@xiaoqiang-desktop:~$
5.yaml
image_width:
image_height:
camera_name: head_camera
camera_matrix:
rows:
cols:
data: [373.5111594774043, , 315.8084189513565, , 375.5234360862851, 229.6133929271384, , , ]
distortion_model: plumb_bob
distortion_coefficients:
rows:
cols:
data: [-0.2970245237058798, 0.07110293616491861, -0.0001459348712873391, -0.0009524327516462756, ]
rectification_matrix:
rows:
cols:
data: [, , , , , , , , ]
projection_matrix:
rows:
cols:
data: [257.2185668945312, , 313.4603221630314, , , 259.698974609375, 229.0707409084716, , , , , ]xiaoqiang@xiaoqiang-desktop:~$
6.yaml
image_width:
image_height:
camera_name: head_camera
camera_matrix:
rows:
cols:
data: [371.5469859488027, , 313.7857920360233, , 374.1714701553096, 230.9875296271416, , , ]
distortion_model: plumb_bob
distortion_coefficients:
rows:
cols:
data: [-0.3041189203607426, 0.07966724101404286, -0.001437047423319973, -0.0007192846641734516, ]
rectification_matrix:
rows:
cols:
data: [, , , , , , , , ]
projection_matrix:
rows:
cols:
data: [262.8392028808594, , 312.3786083245795, , , 265.9633483886719, 227.7569378555927, , , , , ]xiaoqiang@xiaoqiang-desktop:~$
7.yaml
image_width:
image_height:
camera_name: head_camera
camera_matrix:
rows:
cols:
data: [371.5334862939256, , 315.9415386864103, , 374.2254744680155, 230.2973984145617, , , ]
distortion_model: plumb_bob
distortion_coefficients:
rows:
cols:
data: [-0.3008205280473007, 0.07564784106509534, -0.0009834589984554513, -0.001248593384655783, ]
rectification_matrix:
rows:
cols:
data: [, , , , , , , , ]
projection_matrix:
rows:
cols:
data: [259.6164855957031, , 313.3351599445923, , , 262.554443359375, 227.852100494405, , , , , ]xiaoqiang@xiaoqiang-desktop:~$


相机矩阵(Camera Matrix):https://blog.csdn.net/zb1165048017/article/details/71104241
ros kinect calibration的更多相关文章
- 关于ros将opencv版本固定“写死”的一些想法
今天主要工作是将ros和zed结合起来,但是发现自己安装了opencv3.1,ros indigo安装的是opencv2.4.8,这就麻烦了,zed支持的是opencv3.1.一开始使用slam2时, ...
- ROS indigo下Kinect v1的驱动安装与调试
ROS indigo下Kinect v1的驱动安装与调试 本文简要叙述了在ROS indigo版本下Kinect v1的驱动安装与调试过程. 1. 实验环境 (1)硬件: 台式机和Kinect v1 ...
- kinect在ros上的初步测试---17
摘要: 原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 1.在使用本贴前必须先按照我的上一个博文正确在ubuntu上安装kinect驱动:http:// ...
- ubuntu14.04 and ros indigo install kinect driver--16
摘要: 原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 今日多次测设ros indigo install kinect driver ,提示各种失败,然 ...
- ubuntu14.04下 Kinect V2+Ros接口安装
1. 首先git下载代码,放到主文件夹下面 git clone https://github.com/OpenKinect/libfreenect2.git 2. 然后安装依赖项如下,最好事先编译安装 ...
- ROS与深度相机入门教程-在ROS使用kinect v1摄像头
ROS与深度相机入门教程-在ROS使用kinect v1摄像头 说明: 介绍在ros安装和使用kinect v1摄像头 介绍freenect包 安装驱动 deb安装 $ sudo apt-get in ...
- ORB-SLAM2实现(kinect V1/ROS)
实验室电脑环境ubuntu14.04和ROS indigo已经装好. 1. 构建工作空间[非常重要的一步] mkdir -p ~/catkin_ws/src cd ~/catkin_ws/ catki ...
- Kinect for Xbox one(v2) + Ubuntu 14.04 +ROS 安装
相比于kinect for xbox 360(v1)通过结构光来获取深度,Kinect for Xbox one(v2) 采用time flight技术,极大改善了深度图像的性能. kinect fo ...
- ROS学习(一)Ros 中使用kinect
上的安装说明如下: 官网上明确写了如果安装windows kinect还需要安装一个驱动,但是有些ROS的书上并没有这么做,只提到了使用如下两步进行安装即可使用: sudo apt-get insta ...
随机推荐
- keepalive配置db层的ha的一些注意点
具体db是那种都一样 db先做好replica,可以用自己带的,或者drbd的磁盘复制 db和keepalived必须在同一主机 keepalived里面的rs必须只有一个(否则,做不了主从,理论上会 ...
- 通过BeanFactoryPostProcessor来获取bean
一.现在我们很多时候都在spring的容器中,进行bean的提取和操作,但是配置里面首先需要扫描相应的包来实现相关bean的注入 但是问题来了.如果我们在另外一个线程需要用的时候,并且没有配置扫描该类 ...
- 20165233 实验一 Java开发环境的熟悉
20165233 实验一 Java开发环境的熟悉 实验要求 1.没有Linux基础的同学建议先学习<Linux基础入门(新版)><Vim编辑器> 课程: 2.完成实验.撰写实验 ...
- webdriver定位页面元素时使用set_page_load_time()和JavaScript停止页面加载
webdriver定位页面元素时使用set_page_load_time()和JavaScript停止页面加载 原文:https://my.oschina.net/u/2344787/blog/400 ...
- 《OpenCL异构并行编程实战》补充笔记散点,第一至四章
▶ 总体印象:适合 OpenCL 入门的书,有丰富的代码和说明,例子较为简单.先把 OpenCL 代码的基本结构(平台 → 设备 → 上下文 → 命令队列 → 创建缓冲区 → 读写缓冲区 → 编译代码 ...
- 【CentOS 6.5】QtCreator启动时关于dbus-1的错误解决方法
关于上篇文章留下的启动QtCreator提示:dbus_connection_can_send_type的错误,解决办法: 更新dbus版本来解决.. 首先去 http://dbus.freedesk ...
- Git 知识总结
版本控制git之一 - 仓库管理 版本控制git之二-分支 git https://mp.weixin.qq.com/s/96FS12DTzbjAJQ1ynRNqdg git init 初始化目录 g ...
- email 解析 ,发送 邮件
email 来源:https://blog.csdn.net/xyang81/article/details/7675160 详见此人其它mail 篇 参考2:http://lib.csdn. ...
- javascript中所谓的“坑”收录
坑一: // 反例myname = "global"; // 全局变量function func() { alert(myname); // "undefined&quo ...
- ERROR 程序出错,错误原因:'bytes' object has no attribute 'read'
使用json解析数据时,通常遇到这里就会出现问题'bytes' object has no attribute 'read',这是由于使用的json内置函数不同,一个是load另一个是loads. i ...