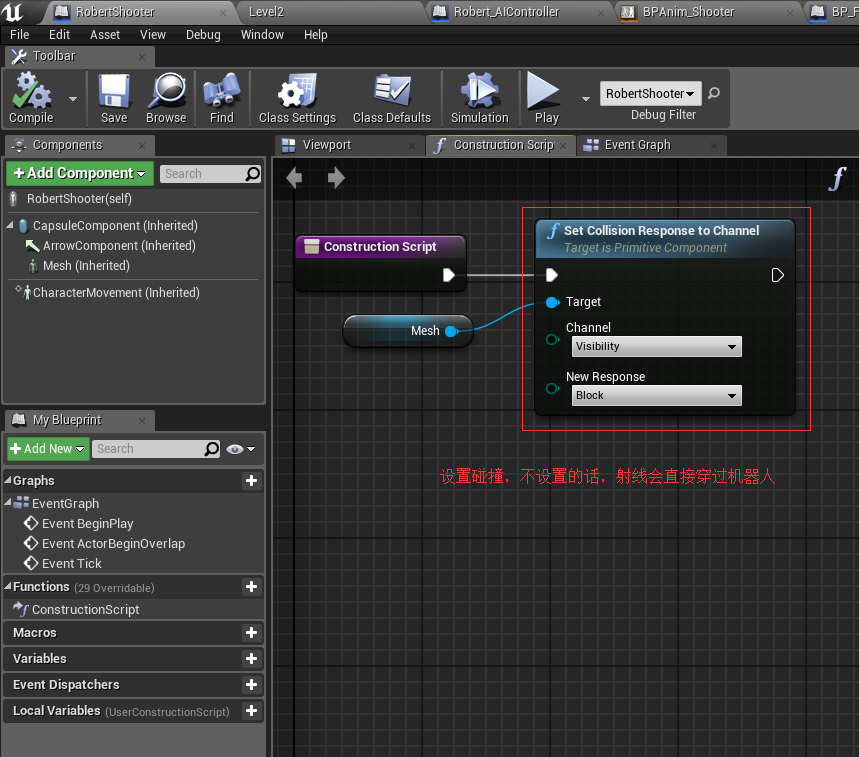
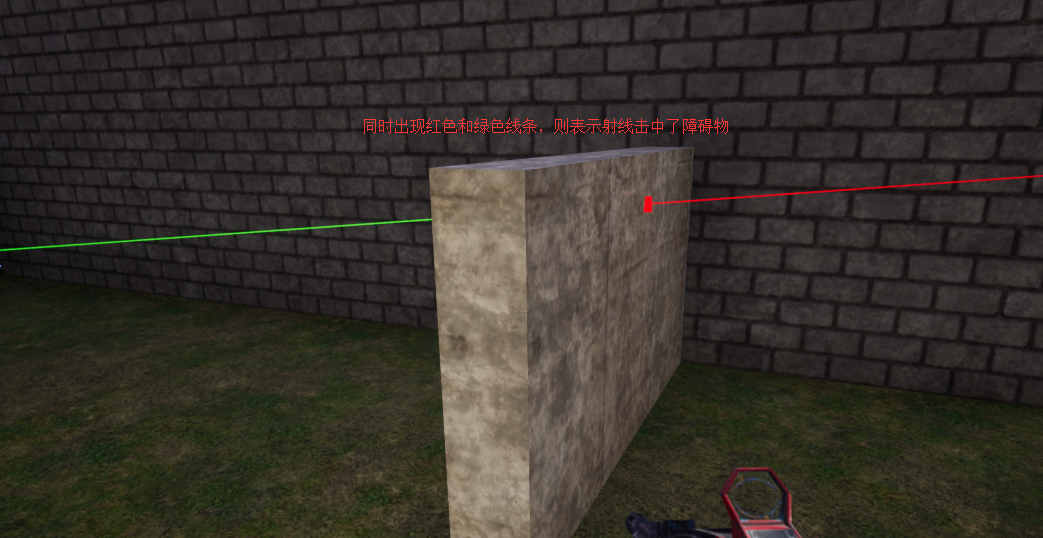
[UE4]射中机器人
[UE4]射中机器人的更多相关文章
- [UE4]增加机器人
一.新增蓝图继承自Shooter名为AIShooter.玩家角色也是继承自Shooter. 二.使用AIMoveTo追踪玩家.玩家控制的角色调用这个方法没反应. 三.关卡中添加组件NavMeshBou ...
- [UE4]添加机器人
跟玩家角色一样,机器人也是继承自“Character”,动画蓝图也是跟角色玩家的一样,区别是机器人要使用“AIController”来控制
- [UE4]让机器人开枪射击
- [UE4]使机器人受伤
- 用UE4蓝图制作FPS_零基础学虚幻4第二季
课时1:案例演示 05:12 课时2:工程准备 07:35 (把一个项目从一个工程移动到另一个工程) 1.新建一个空白工程,不包含初学者内容 2.选择我们要复制的工程,按右键,如下图: 复制到新工程的 ...
- [UE4]控制台命令,生成机器人
在关卡蓝图中: 运行游戏的手,按“·”键(键盘第二行第一个键,数字1前面的一个键)呼出控制台输入界面,输入“ce 事件名称 参数值”,然后回车. 可以添加一个Trigger Box作为机器人的出生点
- [UE4]子弹穿透多个机器人
一.将机器人的碰撞类型改成“OverLap” 二.使用“MultiLineTraceByChannel”这个是可以穿透检测,可以检测到多个物体(前提是被检测物体的碰撞类型是“OverLap”).“Li ...
- [UE4]机器人自动寻路
要让机器人能够自动寻路,需要画出自动寻路的范围,可以使用“Nav Mesh Bounds Volume”组件来自定寻路范围 通过“Delay”节点可以实现让AI执行Move To以后停顿1秒,然后继 ...
- [UE4]机器人射击逻辑行为树
1.寻找敌人 2.如果没有找到,等待2秒,跳转到1 3.如果找到了,走向敌人 4.走向敌人的过程中,如果看见敌人了,则射击 5.如果敌人没有了,则跳转到1
随机推荐
- LibSVM文件转换为csv格式
Spark MLlib 的官方例子里面提供的数据大部分是 libsvm 格式的.这其实是一种非常蛋疼的文件格式,和常见的二维表格形式相去甚远,下图是里面的一个例子: libsvm 文件的基本格式如下: ...
- REST easy with kbmMW #4 – Access management
在前面有关如何使用kbmMW创建REST服务器的基础上,现在已经到了考虑该如何控制用户的访问.什么是访问管理?就是“允许谁做什么"的问题. 显然,这个世界中存在数据,应该保护他而不被未授权的 ...
- Linux rm的一次误用
今天在Linux下误用了一次rm -rf,经历惨痛,记录一下. 原因是我删除了一个文件到回收站,然后点错了将home下的所有东西都删到了回收站,然后我又从回收站拷贝回home目录而不是使用恢复,因为h ...
- 建立自己的Servlet--成功
1--用记事本新建一个servlet程序,文件名为HelloWorld.java,文件内容如下: import java.io.*; import javax.servlet.*; import ja ...
- android_serialport_api hacking
/************************************************************************************ * * android_se ...
- 五个对你有用的Everything搜索技巧
分享五个对你有用的Everything搜索技巧: 一, empty:(查找空文件夹);二, dupe:(查重复文档);三, 空格(与), |(或),!(非); 四, e:\ (路径搜索);五, wil ...
- ASP.NET MVC配置Redis服务
===================== 1.下载并安装Redis.官网并未提供Windows安装版,所以去Github 下载 下载地址: https://github.com/MicrosoftA ...
- web 常用网址及资源
一.web教程 w3school在线教程 菜鸟教程 二.学习路线 2017前端学习路线图,内附完整前端自学视频教程+工具经验-黑马程序员技术交流社区 三.工具 盘搜 百度地图 查物流 金山词霸 必应词 ...
- Nginx访问限制模块limit_conn_zone 和limit_req_zone配置使用
nginx可以通过limit_conn_zone 和limit_req_zone两个组件来对客户端访问目录和文件的访问频率和次数进行限制,另外还可以善用进行服务安全加固,两个模块都能够对客户端访问进行 ...
- 51Nod1526 分配笔名
分析 在trie树上贪心,将所有串加入trie树中,在深度较深的地方匹配会更优. 由于只需要知道最后的总质量,所以直接取每个点的子树中最大的匹配即可 复杂度\(O(\sum len)\) 加串的时候把 ...