机器人学 —— 轨迹规划(Artificial Potential)

今天终于完成了机器人轨迹规划的最后一次课了,拜拜自带B - BOX 的 Prof. TJ Taylor.
最后一节课的内容是利用势场来进行轨迹规划。此方法的思路非常清晰,针对Configration Space 里面的障碍物进行 DT变换,用DT变换值作为罚函数的输入,让机器人尽可能的远离障碍物,同时再终点设计抛物面函数,让机器人有向终点靠近的趋势。最后所获得的就是机器人的一种可行运动轨迹。由于此轨迹是梯度下降的,并且罚函数是连续的,所以如果机器人不陷入局部最优,那么就可以获得全局最优路径(我本人不持这样的观点,二阶Hessian矩阵大写的不服,凭什么贪婪算法是最短路径?)
1、基于DT变换生成罚函数图
DT变换是2D2值图像中的一种算法,其作用是找到某像素到最近非0像素的距离。换言之,就是机器人到最近障碍物的距离。这种距离再机器人学运动中非常容易获得,只要有实时的距离传感器,就能够找到机器人再不同位置下,到最近障碍物的距离。从而生成 f - map (罚函数图)
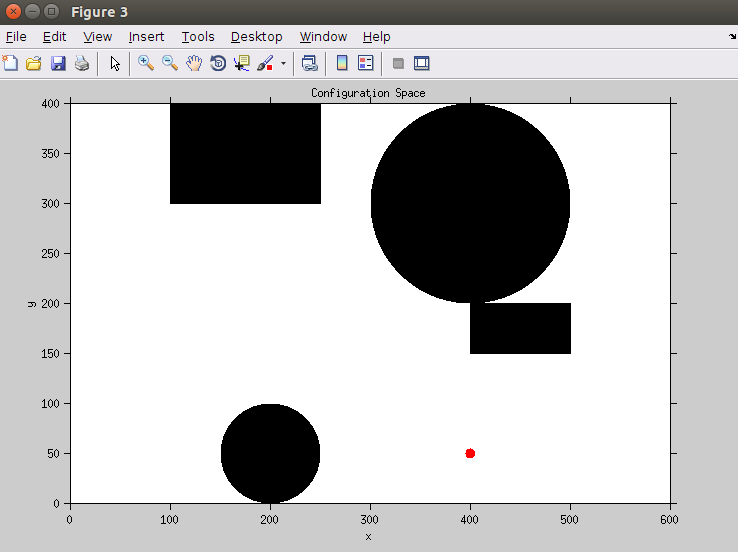
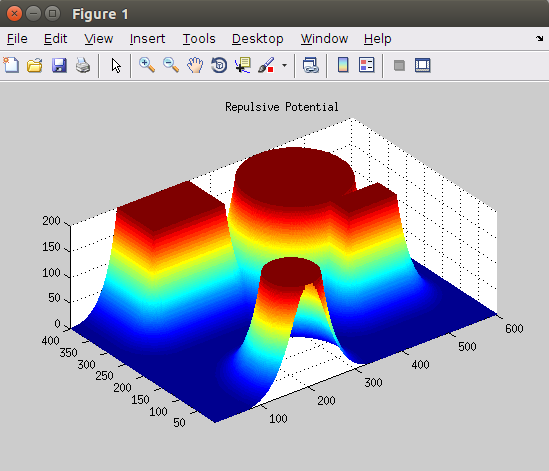
机器人的Configuration Space 与 f - map 如上图所示。
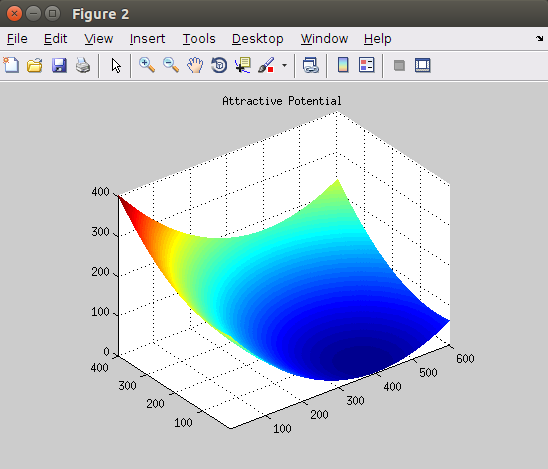
2、拉向终点的势
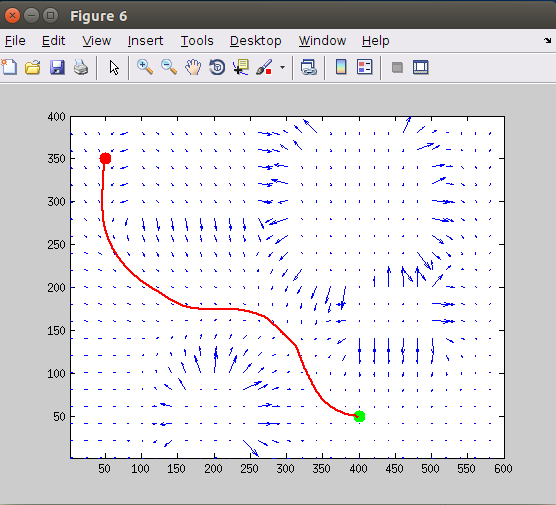
除了罚函数以外,机器人还需要一个拉向终点的势 —— Configuration Space 上一个以终点为中心的抛物面。将其与f - map 相加后,即可得到最终的Artificial Potential.
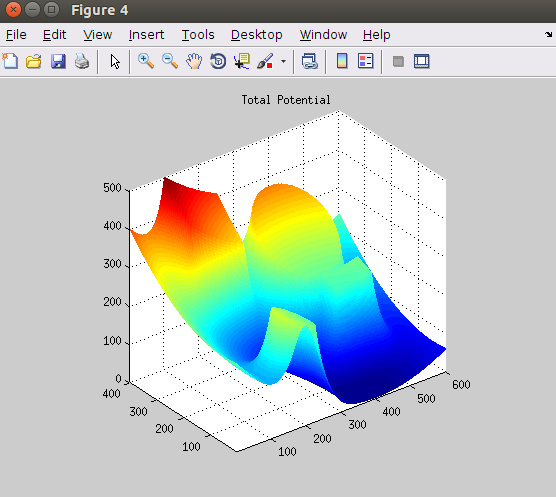
3、梯度下降
在Artificial Potential 上执行梯度下降算法,获得机器人运动轨迹。
4、总结
机器人轨迹规划是很有前景的学科,以后有前途的方向包括以下:
非同性机器人:无人汽车不能随时倒车
动力学约束下的规划:考虑机器人的加速减速
多机器人轨迹规划
针对移动障碍轨迹规划
针对不确定环境轨迹规划
机器人学 —— 轨迹规划(Artificial Potential)的更多相关文章
- 机器人学 —— 轨迹规划(Introduction)
轨迹规划属于机器人学中的上层问题,其主要目标是计划机器人从A移动到B并避开所有障碍的路线. 1.轨迹计划的对象 轨迹规划的对象是map,机器人通过SLAM获得地map后,则可在地图中选定任意两点进行轨 ...
- 机器人学 —— 轨迹规划(Sampling Method)
上一篇提到,机器人轨迹规划中我们可以在 Configuration Space 中运行A* 或者 DJ 算法.无论A* 还是DJ 算法,都必须针对邻域进行搜索,如果2自由度则有4邻域,2自由度则有8邻 ...
- 机器人学 —— 轨迹规划(Configuration Space)
之前的轨迹规划中,我们只考虑了质点,没有考虑机器人的外形与结构.直接在obstacle map 中进行轨迹规划,然而世纪情况中,机器人有固定外形,可能会和障碍物发生碰撞.此情况下,我们针对机器人自由度 ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人关节空间轨迹规划--S型速度规划
关节空间 VS 操作空间 关节空间与操作空间轨迹规划流程图如下(上标$i$和$f$分别代表起始位置initial和目标位置final): 在关节空间内进行轨迹规划有如下优点: 在线运算量更小,即无需进 ...
- 机器人中的轨迹规划(Trajectory Planning )
Figure. Several possible path shapes for a single joint 五次多项式曲线(quintic polynomial) $$\theta(t)=a_0+ ...
- zz自动驾驶中轨迹规划的探索和挑战
大家好,今天我们主要介绍一下轨迹规划的探索和挑战,我主要从四个方面介绍: 轨迹规划的概念 决策 横向规划 纵向规划 轨迹规划的概念: 轨迹规划的核心就是要解决车辆该怎么走的问题.比如我们知道了附近有行 ...
- Minimum Snap轨迹规划详解(2)corridor与时间分配
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值.为了解决这些问题有两种思路: 思路 ...
- Minimum Snap轨迹规划详解(1)轨迹规划
一. 轨迹规划是什么? 在机器人导航过程中,如何控制机器人从A点移动到B点,通常称之为运动规划.运动规划一般又分为两步: 1.路径规划:在地图(栅格地图.四\八叉树.RRT地图等)中搜索一条从A点到B ...
随机推荐
- python 环境搭建和Spyder的安装应用
http://blog.csdn.net/BurneAris/article/details/75214976
- 解决springboot druid 数据库批量更新错误问题
原文:https://www.2cto.com/kf/201712/706399.html springboot druid 数据库多SQL错误multi-statement not allow Ca ...
- WordPress基础:极简手动安装教程
1.下载WordPress 2.将解压后的文件夹,放到网站根目录,并重命名为你喜欢的目录如:w, 3.重命名文件wp-config-sample.php 为 wp-config.php,并进行配置 4 ...
- Docker修改daemon.json后无法启动的问题
本文的运行环境为Centos 7.3,Docker与Kubernetes的安装方式见kubeadm安装kubernetes V1.11.1 集群 最近在整理Docker和Kubernetes中的日志与 ...
- Spark:实现行转列
示例JAVA代码: import static org.apache.spark.sql.functions.col; import static org.apache.spark.sql.funct ...
- UVa 902 - Password Search
题目:给你一个小写字母组成大的串和一个整数n.找到里面长度为n出现最频繁的子串. 分析:字符串.hash表.字典树. 这里使用hash函数求解,仅仅做一次扫描就可以. 说明:假设频率同样输出字典序最小 ...
- 微软BI 之SSIS 系列 - 在 SSIS 中将指定目录下的所有文件分类输出到不同文件夹
开篇介绍 比如有这样的一个需求,旧的一个业务系统通常将产出的文件输出到同一个指定的目录下的不同子目录,输出的文件类型有 XML,EXCEL, TXT 这些不同后缀的文件.现在需要在 SSIS 中将它们 ...
- 解锁scott账户方法
装完了数据库,忘了给scott账户解锁.这时可以在sql plus工具里,也可以在控制台通过命令行给scott账户解锁. 在第一种情况下,以system账户+自己安装时设置的密码,登录SQL Plus ...
- settings.xml配置详解
简单值 一半顶层settings元素是简单值,它们表示的一系列值可以配置Maven的核心行为:settings.xml中的简单顶层元素 < settings xmlns="http:/ ...
- Android 手动调用 返回键
有人想通过下面代码来实现手动调用返回键,很可惜会出现空指针异常. this.onKeyDown(KeyEvent.KEYCODE_BACK, null); 我们可以通过调用 onBackPressed ...