Python+OpenCV图像处理(十二)—— 图像梯度
简介:图像梯度可以把图像看成二维离散函数,图像梯度其实就是这个二维离散函数的求导。
Sobel算子是普通一阶差分,是基于寻找梯度强度。拉普拉斯算子(二阶差分)是基于过零点检测。通过计算梯度,设置阀值,得到边缘图像。
以下各种算子的原理可参考:https://blog.csdn.net/poem_qianmo/article/details/25560901
一、Sobel算子
代码如下:
import cv2 as cv
#Sobel算子
def sobel_demo(image):
grad_x = cv.Sobel(image, cv.CV_32F, 1, 0) #对x求一阶导
grad_y = cv.Sobel(image, cv.CV_32F, 0, 1) #对y求一阶导
gradx = cv.convertScaleAbs(grad_x) #用convertScaleAbs()函数将其转回原来的uint8形式
grady = cv.convertScaleAbs(grad_y)
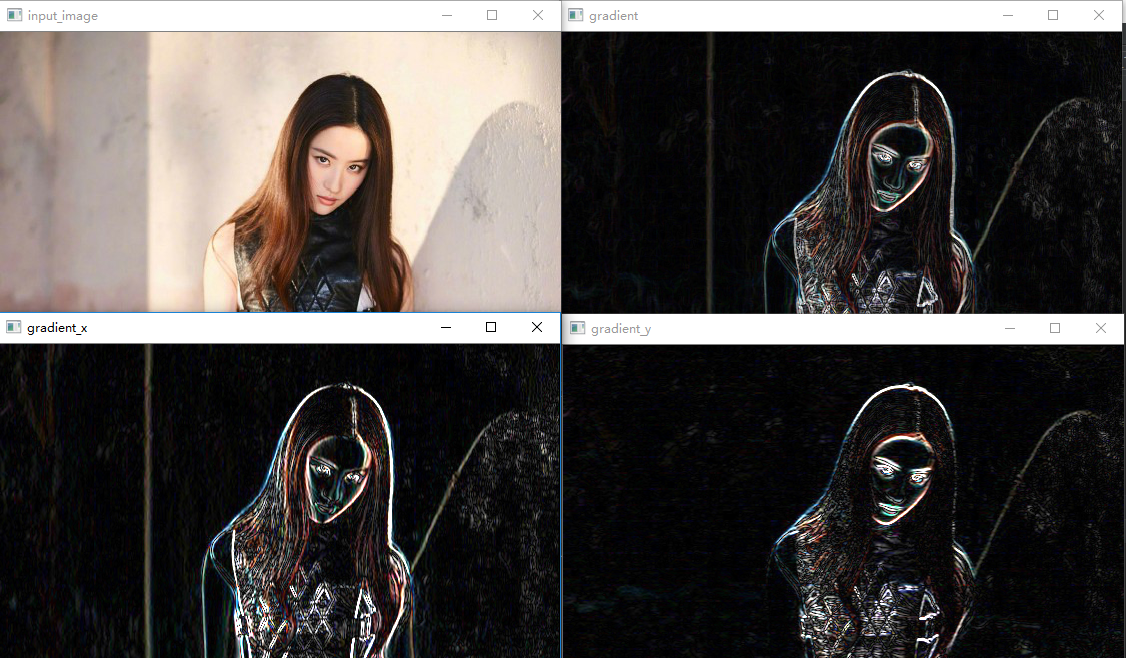
cv.imshow("gradient_x", gradx) #x方向上的梯度
cv.imshow("gradient_y", grady) #y方向上的梯度
gradxy = cv.addWeighted(gradx, 0.5, grady, 0.5, 0) #图片融合
cv.imshow("gradient", gradxy) src = cv.imread('E:/imageload/liu.jpg')
cv.namedWindow('input_image', cv.WINDOW_NORMAL) #设置为WINDOW_NORMAL可以任意缩放
cv.imshow('input_image', src)
sobel_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
运行结果:
注意:
1.Sobel算子用来计算图像灰度函数的近似梯度。Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
2.Sobel具有平滑和微分的功效。即:Sobel算子先将图像横向或纵向平滑,然后再纵向或横向差分,得到的结果是平滑后的差分结果。
OpenCV的Sobel函数原型为:Sobel(src, ddepth, dx, dy[, dst[, ksize[, scale[, delta[, borderType]]]]]) -> dst
src参数表示输入需要处理的图像。
ddepth参数表示输出图像深度,针对不同的输入图像,输出目标图像有不同的深度。
具体组合如下:
src.depth() = CV_8U, 取ddepth =-1/CV_16S/CV_32F/CV_64F (一般源图像都为CV_8U,为了避免溢出,一般ddepth参数选择CV_32F)
src.depth() = CV_16U/CV_16S, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_32F, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_64F, 取ddepth = -1/CV_64F
注:ddepth =-1时,代表输出图像与输入图像相同的深度。
dx参数表示x方向上的差分阶数,1或0 。
dy参数表示y 方向上的差分阶数,1或0 。
dst参数表示输出与src相同大小和相同通道数的图像。
ksize参数表示Sobel算子的大小,必须为1、3、5、7。
scale参数表示缩放导数的比例常数,默认情况下没有伸缩系数。
delta参数表示一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中。
borderType表示判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
参考:
https://blog.csdn.net/streamchuanxi/article/details/51542141
https://blog.csdn.net/sunny2038/article/details/9170013
Sobel算子原理:https://www.cnblogs.com/lancidie/archive/2011/07/17/2108885.html
2.OpenCV的convertScaleAbs函数使用线性变换转换输入数组元素成8位无符号整型。函数原型:convertScaleAbs(src[, dst[, alpha[, beta]]]) -> dst
3.OpenCV的addWeighted函数是计算两个数组的加权和。函数原型:addWeighted(src1, alpha, src2, beta, gamma[, dst[, dtype]]) -> dst
src1参数表示需要加权的第一个输入数组。
alpha参数表示第一个数组的权重。
src2参数表示第二个输入数组,它和第一个数组拥有相同的尺寸和通道数。
beta参数表示第二个数组的权重。
gamma参数表示一个加到权重总和上的标量值。
dst参数表示输出的数组,它和输入的两个数组拥有相同的尺寸和通道数。
dtype参数表示输出数组的可选深度。当两个输入数组具有相同的深度时,这个参数设置为-1(默认值),即等同于src1.depth()。
二、Scharr算子
代码如下:
import cv2 as cv
#Scharr算子(Sobel算子的增强版,效果更突出)
def Scharr_demo(image):
grad_x = cv.Scharr(image, cv.CV_32F, 1, 0) #对x求一阶导
grad_y = cv.Scharr(image, cv.CV_32F, 0, 1) #对y求一阶导
gradx = cv.convertScaleAbs(grad_x) #用convertScaleAbs()函数将其转回原来的uint8形式
grady = cv.convertScaleAbs(grad_y)
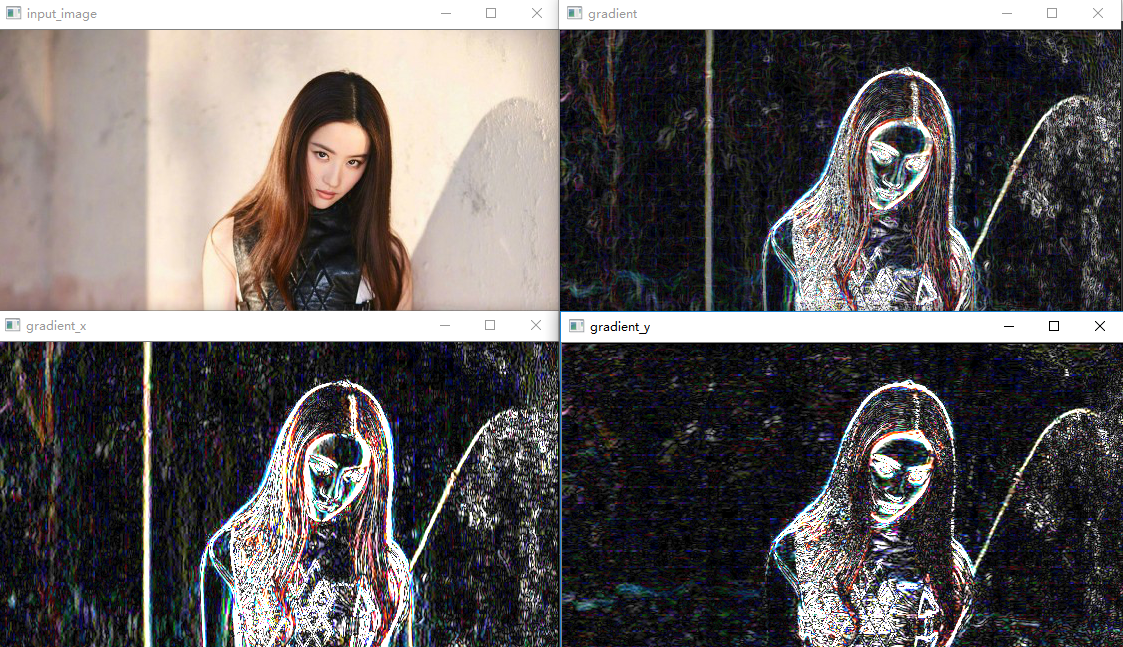
cv.imshow("gradient_x", gradx) #x方向上的梯度
cv.imshow("gradient_y", grady) #y方向上的梯度
gradxy = cv.addWeighted(gradx, 0.5, grady, 0.5, 0)
cv.imshow("gradient", gradxy)
src = cv.imread('E:/imageload/liu.jpg')
cv.namedWindow('input_image', cv.WINDOW_NORMAL) #设置为WINDOW_NORMAL可以任意缩放
cv.imshow('input_image', src)
Scharr_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
运行结果:
注意:
Scharr算子也是计算x或y方向上的图像差分。OpenCV的Scharr函数原型为:Scharr(src, ddepth, dx, dy[, dst[, scale[, delta[, borderType]]]]) -> dst
参数和Sobel算子的几乎差不多,意思也一样,只是没有ksize大小。
三、拉普拉斯算子
代码如下:
import cv2 as cv
#拉普拉斯算子
def Laplace_demo(image):
dst = cv.Laplacian(image, cv.CV_32F)
lpls = cv.convertScaleAbs(dst)
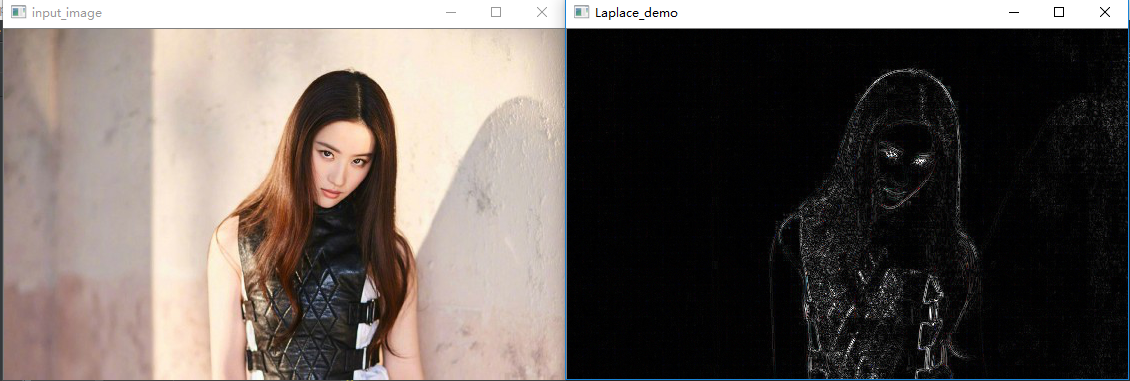
cv.imshow("Laplace_demo", lpls)
src = cv.imread('E:/imageload/liu.jpg')
cv.namedWindow('input_image', cv.WINDOW_NORMAL) #设置为WINDOW_NORMAL可以任意缩放
cv.imshow('input_image', src)
Laplace_demo(src)
cv.waitKey(0)
cv.destroyAllWindows()
运行结果:
注意:
1.拉普拉斯算子(Laplace Operator)是n维欧几里德空间中的一个二阶微分算子,定义为梯度(▽f)的散度(▽·f)。
2.OpenCV的Laplacian函数原型为:Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]]) -> dst
src参数表示输入需要处理的图像。
ddepth参数表示输出图像深度,针对不同的输入图像,输出目标图像有不同的深度。
具体组合如下:
src.depth() = CV_8U, 取ddepth =-1/CV_16S/CV_32F/CV_64F (一般源图像都为CV_8U,为了避免溢出,一般ddepth参数选择CV_32F)
src.depth() = CV_16U/CV_16S, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_32F, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_64F, 取ddepth = -1/CV_64F
注:ddepth =-1时,代表输出图像与输入图像相同的深度。
dst参数表示输出与src相同大小和相同通道数的图像。
ksize参数表示用于计算二阶导数滤波器的孔径大小,大小必须是正数和奇数。
scale参数表示计算拉普拉斯算子值的比例因子,默认情况下没有伸缩系数。
delta参数表示一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中。
borderType表示判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
补:
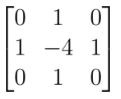
这里ksize参数默认值为1,此时Laplacian()函数采用以下3x3的孔径:
Python+OpenCV图像处理(十二)—— 图像梯度的更多相关文章
- Python+OpenCV图像处理(二)——打印图片属性、设置图片存储路径、电脑摄像头的调取和显示
一. 打印图片属性.设置图片存储路径 代码如下: #打印图片的属性.保存图片位置 import cv2 as cv import numpy as np #numpy是一个开源的Python科学计算库 ...
- Python+OpenCV图像处理(一)
Python+OpenCV图像处理(一): 读取,写入和展示图片 调用摄像头拍照 调用摄像头录制视频 1. 读取.写入和展示图片 图像读入:cv2.imread() 使用函数cv2.imread() ...
- Python+OpenCV图像处理(一)——读取显示一张图片
先在此处先声明,后面学习python+opencv图像处理时均参考这位博主的博文https://blog.csdn.net/u011321546/article/category/7495016/2? ...
- 进击的Python【第十二章】:mysql介绍与简单操作,sqlachemy介绍与简单应用
进击的Python[第十二章]:mysql介绍与简单操作,sqlachemy介绍与简单应用 一.数据库介绍 什么是数据库? 数据库(Database)是按照数据结构来组织.存储和管理数据的仓库,每个数 ...
- Python+OpenCV图像处理(十四)—— 直线检测
简介: 1.霍夫变换(Hough Transform) 霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进算法.主要用来从图像中分离出具有某种相同特征的几何形状(如,直线 ...
- opencv学习笔记(六)---图像梯度
图像梯度的算法有很多方法:sabel算子,scharr算子,laplacian算子,sanny边缘检测(下个随笔)... 这些算子的原理可参考:https://blog.csdn.net/poem_q ...
- python 教程 第二十二章、 其它应用
第二十二章. 其它应用 1) Web服务 ##代码 s 000063.SZ ##开盘 o 26.60 ##最高 h 27.05 ##最低 g 26.52 ##最新 l1 26.66 ##涨跌 c ...
- python 教程 第十二章、 标准库
第十二章. 标准库 See Python Manuals ? The Python Standard Library ? 1) sys模块 import sys if len(sys.argv) ...
- OpenCV学习笔记(10)——图像梯度
学习图像梯度,图像边界等 梯度简单来说就是求导. OpenCV提供了三种不同的梯度滤波器,或者说高通滤波器:Sobel,Scharr和Lapacian.Sobel,Scharr其实就是求一阶或二阶导. ...
随机推荐
- Python3学习之路~2.9 字符编码与转码
详细文章: http://www.cnblogs.com/yuanchenqi/articles/5956943.html http://www.diveintopython3.net/strings ...
- MySQL语法和用户授权
管理数据库 create database 等同于 create schema #导入数据库脚本 MariaDB [db1]> source /root/mysql/hellodb_in ...
- 001-js-时间格式化
方法一. // 对Date的扩展,将 Date 转化为指定格式的String // 月(M).日(d).小时(h).分(m).秒(s).季度(q) 可以用 1-2 个占位符, // 年(y)可以用 1 ...
- NYOJ 92
1.深搜(会爆栈,通过开全局栈模拟递归) 爆栈代码 # include<iostream> # include<string> # include<string.h> ...
- 递归与非递归打印乘法口诀表--Scala(指令式、函数式思维练习)
object Test extends App { def printMultiTable() { var i = 1 while (i < 10) { var j = 1 while (j & ...
- clone git 项目到 非空目录
如果我们往一个非空的目录下 clone git 项目,就会提示错误信息: fatal: destination path '.' already exists and is not an empty ...
- Python笔记:调用函数,带扩号和和不带括号的区别
调用函数,如果带括号,那么是调用函数运行后的结果, 调用函数不带括号,调用的是函数本身 例如: def cun (a,b): return a+b print(cun) : 调用函数,打印的是函数 p ...
- 158A
#include <iostream> #include <algorithm> using namespace std; int main() { int groups[10 ...
- 112A
#include <iostream> #include <string> #include <cctype> using namespace std; int m ...
- Python生态工具、文本处理和系统管理(虚拟)
一.Python生态工具 一.Python内置小工具 1.秒级启动一个下载服务器 Python 内置了一个下载服务器就能够显著提升效率了 . 例如, 你的同事要让你传的文件位于某一个目录下,那么,你可 ...