TurnipBit之DIY无线遥控智能小车
一、准备工作
TurnipBit 开发板 2块
TurnipBit 扩展板 1块
数据线 1条
智能小车器件 1套
电机驱动模块(L298N) 1个
在线可视化编程 点击进入
二、思路设计
2块TurnipBit开发板,1块模拟体感器,用于采集人体的动作变化,并将这些信息发送给接收器;另1块当做接收器,用来接收模拟设备的数据,同时控制小车执行相应的动作。
三、无线智能遥控车的实现
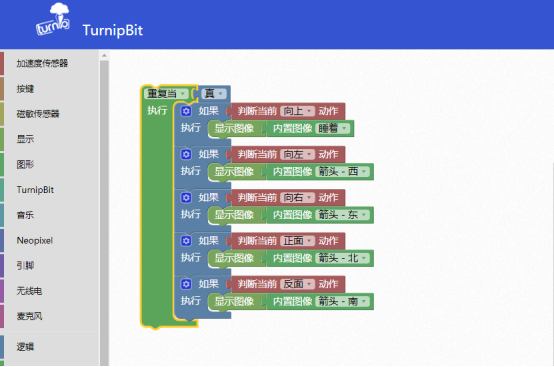
1、功能区点击加速度传感器,选择判断当前…的动作。如下图:

本次实验主要涉及到5种动作,即:向上、向左、向右、正面、反面。
接下来展开分析一下,这5种动作对应的TurnipBit板子的实物状态。
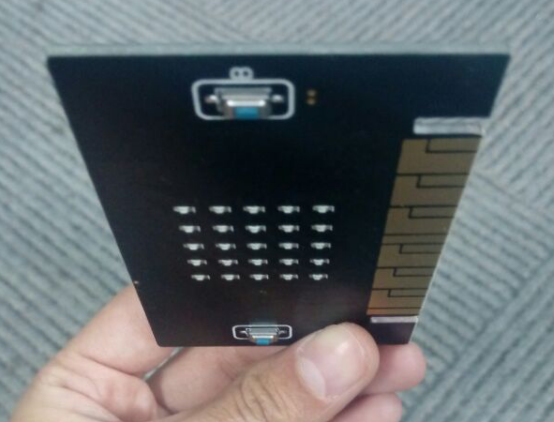
向上:TurnipBit正面(带有LED灯、按键)朝向我们,如下图:

向左:依照向上的动作,逆时针向左旋转90度。如下图:
向右:依照向上的动作,顺时针向右旋转90度。如下图:

正面:依照向上的动作,逆时针向下旋转90度。如下图:

反面:依照向上的动作,顺时针向下旋转90度。如下图:
大家可以尝试实验其他动作,再结合一些想法,实现更有趣酷炫的效果。
2、接下来分配这5种情况下小车的动作:
|
TurnipBit的动作状态 |
对应小车的操作 |
|
向上 |
停止 |
|
向左 |
左转 |
|
向右 |
右转 |
|
正面 |
前进 |
|
反面 |
倒退 |
3、实现模拟体感器的代码。主要功能是不断检测TurnipBit的动作,先用内置图像来表示当前的动作的方向。
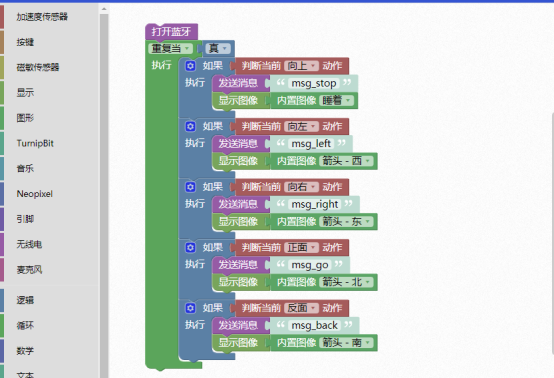
4、体感部分的工作已经完成了,那么该如何将这些信息传送给接收器?不用担心,细心的同学不难发现,功能区内有一个无线电的模块,我们用它来实现两块TurnipBit开发板之间的通信。
首先选择打开蓝牙,放在循环外,然后在每个动作判断内添加发送的消息,消息内容可以自定义。参考下图:
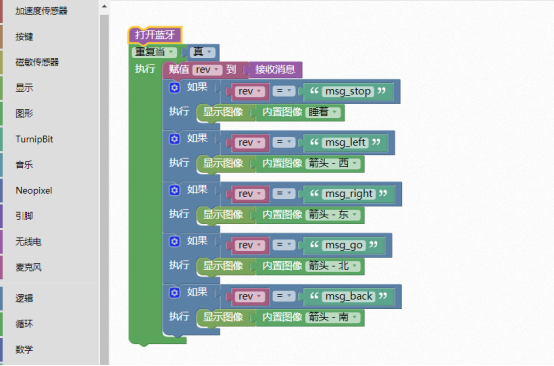
5、现在来完成接收器的代码。主要功能为接收模拟体感器发送的数据,分析数据得出对应的动作,像模拟体感器一样用图案表示出来。如下图:
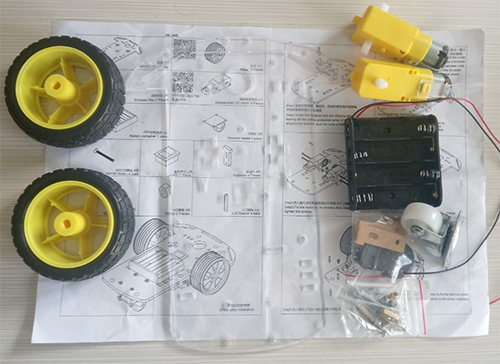
6、接下来我们组装小车,首先晒一下小车的整体器件。包括:2个轮子、2个减速电机、1个万向轮、1包铜柱螺丝包、1个电池盒、1个底板、1个开关。如下图:
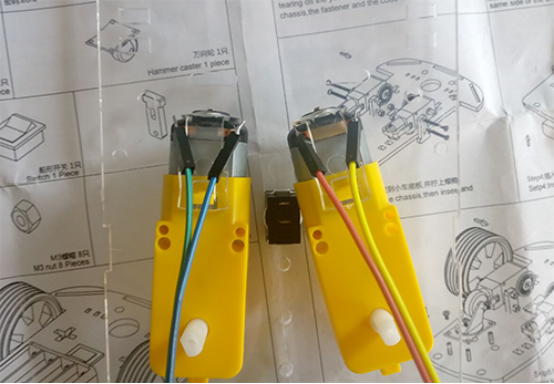
先用焊枪把减速电机两边的引脚片焊上公头杜邦线,方便接入电机驱动模块。如下图:
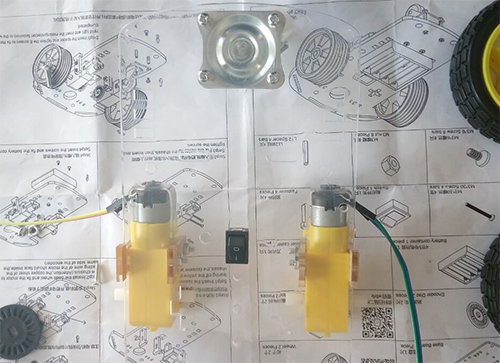
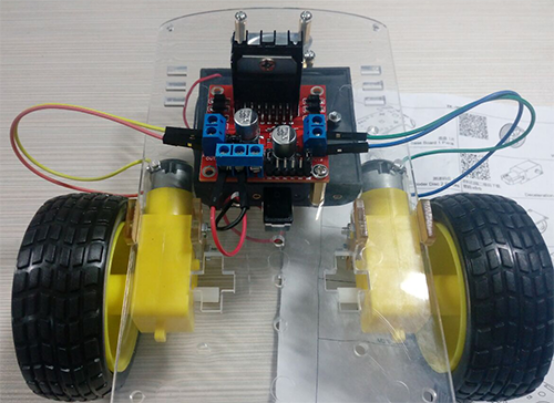
将减速电机、万向轮和开关安装在底板上。如下图:
将轮子安装在两侧的电机上,电池盒安装在底板上。将电池盒的正极(红色导线)焊接在开关的1个铜片上,开关的另一个铜片焊接上公头杜邦线。如下图:

安装电机驱动模块。先看一下整体接线图,如下:
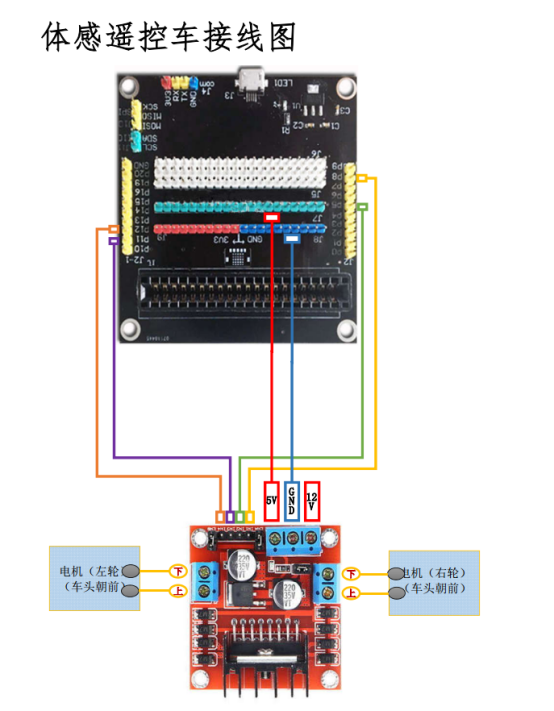
将电池盒的负极(黑色导线)接入电机驱动模块的GND端子,开关引出的公头杜邦线接入+12V端子。两边的电机分别接入电机驱动模块两侧的输出端子(标记OUT1~OUT4)。如下图:
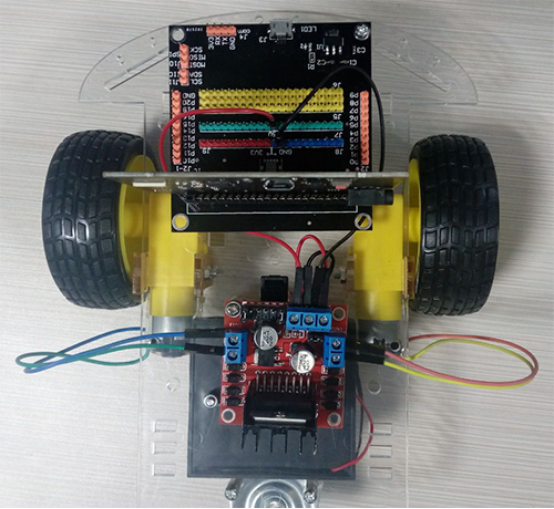
安装TurnipBit开发板和扩展板,将电机驱动模块的GND接入扩展板的GND,+5V接入扩展板的5V。将扩展板上的P5、P8、P11和P12引脚对应接入电机驱动模块的IN2、IN1、IN3和IN4。如下图:
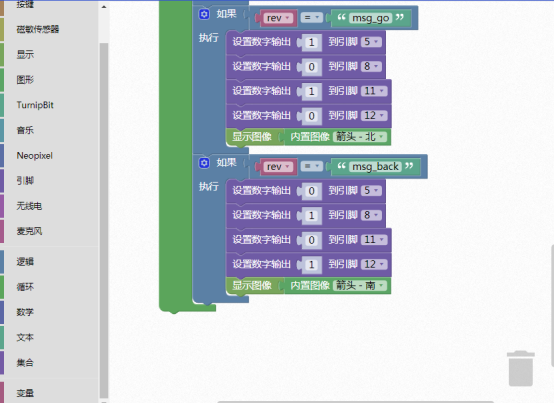
7、我们需要再完善一下接收器的代码。增加控制小车的功能。如下图:



8、将程序下载到用于接收器的TurnipBit的开发板内,再将板子对插到扩展板上,注意板子正面(带有LED)朝向有针脚的一面。
效果展示视频
http://v.youku.com/v_show/id_XMzIxMTY2NDk2MA==.html?spm=a2h3j.8428770.3416059.1
TurnipBit之DIY无线遥控智能小车的更多相关文章
- 基于pcDuino-V2的无线视频智能小车
这段时间抽空做了个智能视频小车.包含了pid电机控制.socket网络编程.多线程编程.epoll机制.gtk图形界面编程. 这是界面: 小车的底层是用的stm32f405系列的单片机+电机驱动做的一 ...
- 基于pcDuino-V2的无线视频智能小车 - pcduino上的网络编程
通过获取从串口发送上来的数据 已经和上位机的连接通信和图像发送.已经对设备的控制 https://github.com/qq2216691777/pcduino_smartcar-pcduino
- 基于pcDuino-V2的无线视频智能小车 - UBUNTU系统上的gtk编程
详细的代码已经上传到git网站:https://github.com/qq2216691777/pcduino_smartcar
- 玩转X-CTR100 l STM32F4 l PS2无线手柄-4WD智能小车
我造轮子,你造车,创客一起造起来!更多塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 前面已介绍X-CTR100控制器解码PS2无线手 ...
- Micropython教程之TPYBoardv102 DIY蓝牙智能小车实例
1.实验目的 1.学习在PC机系统中扩展简单I/O接口的方法. 2.进一步学习编制数据输出程序的设计方法. 3.学习蓝牙模块的接线方法及其工作原理. 4.学习L298N电机驱动板模块的接线方法. 5. ...
- MicroPython教程之TPYBoard开发板DIY红外寻迹小车
智能小车现在差不多是电子竞赛或者DIY中的主流了,寻迹,壁障,遥控什么的,相信大家也都见得很多了,这次就大家探讨一下寻迹小车的制作方法,不同于以往的是这次的程序不用C语言写,而是要使用python语言 ...
- 20135223/20135234/20135229小组——亚博 Arduino智能小车实践报告
实验名称:Arduino智能小车组装和综合测试 实验小组成员:20135223何伟钦 20135234马启扬 20135229吕松鸿 实验日期:2015.10.27—2015.11.3 实验时长:24 ...
- Arduino智能小车实践学习报告
Arduino智能小车实践学习报告 参与人员: 20135316 王剑桥 20135312 吴汉彦 20135319 朱锂 一. 背景了解: 单片机:将中央处理单元CPU(进行运算.控制).随机存储器 ...
- 亚博 Arduino智能小车实验报告
亚博 Arduino智能小车实践报告 一. 程序安装准备 首先安装了Arduino板载USB转串口CH340驱动安装包, 若上述程序安装成功,则可以在我的电脑中找到相应的端口 本机端口号为CO ...
随机推荐
- ssm开发使用redis作为缓存,使用步骤
1.关于spring配置文件中对于redis的配置 <!-- redis配置 --> <bean id="jedisPoolConfig" class=" ...
- Java数据结构和算法(十)——二叉树
接下来我们将会介绍另外一种数据结构——树.二叉树是树这种数据结构的一员,后面我们还会介绍红黑树,2-3-4树等数据结构.那么为什么要使用树?它有什么优点? 前面我们介绍数组的数据结构,我们知道对于有序 ...
- handler 源代码分析
handler Looper 轮询器 MessageQueue 消息对象 1 主线程在一创建的时候就会调用, public static void prepareMainLooper() {}构造方法 ...
- js----数组处理之splice(有js原始addClass方法哦)
上次写了一个轮播的方法:http://blog.csdn.net/stronglyh/article/details/46833499 由于别人问我的时候,给了我html.于是乎我就看到了页面中引用了 ...
- 关于系统首页绘制问题(ext布局+c#后台加入数据)经html输出流输出响应client
关于系统首页绘制问题,业务需求 TODO 绘制系统首页(Main.aspx) 採用的技术:functioncharts+jquery+ext布局+c#+html 解说篇:1,服务端aspx,2,服务端 ...
- Elasticsearch布尔查询——bool
布尔查询允许我们利用布尔逻辑将较小的查询组合成较大的查询. 1.查询返回包含"mill"和"lane"的所有的账户 curl -XPOST 'localhost ...
- SpringCloud四:hystrix-propagation
注:pom.xml 及配置文件配置与上篇相同 package com.itmuch.cloud.controller; import org.springframework.beans.factory ...
- JavaScript操作符(布尔操作符、乘性操作符和加性操作符)
布尔操作符 布尔操作符用来测试两个值的关系,布尔操作符有三个,逻辑非(!).逻辑与(&&),逻辑或(||). 逻辑非由一个叹号(!)组成,可以应用于JavaScript任何值.逻辑非首 ...
- java并发编程的艺术——第五章总结(Lock锁与队列同步器)
Lock锁 锁是用来控制多个线程访问共享资源的方式. 一般来说一个锁可以防止多个线程同时访问共享资源(但有些锁可以允许多个线程访问共享资源,如读写锁). 在Lock接口出现前,java使用synchr ...
- CSS图片文字同行居中
img{ display:inline-block; vertical-align:middle; }