am335x system upgrade kernel uart(七)
1 Scope of Document
This document describes UART hardware design, uart driver porting
2 Requiremen
2.1 Function Requirement
Uboot enable uart0 for debug, Kernel enable uart0 uart1 uart2 uart3.
2.2 Performance Requirement
Support common uart rx tx function.
3 Hardware Overview
uart interface,pin map:
// uart 0
AM335X_UART0_RXD
AM335X_UART0_TXD
// uart 1
AM335X_UART1_RXD
AM335X_UART1_TXD
// uart 2
AM335X_UART2_RXD
AM335X_UART2_TXD
// uart 3
AM335X_UART3_RXD
AM335X_UART3_TXD

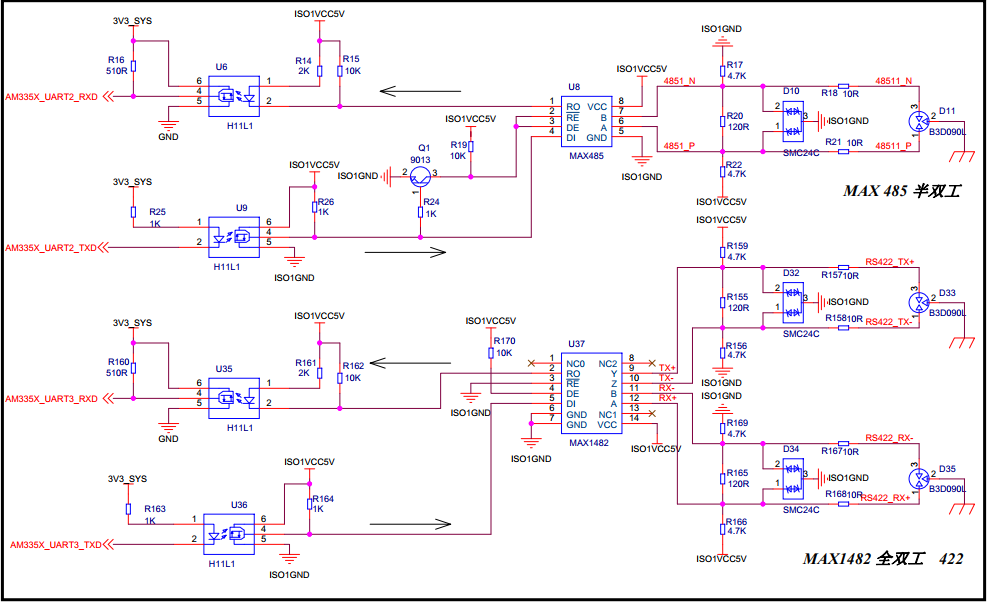
Figure 1 uart interface block diagram
4 Functional Description
4.1 UART DRIVER Overview
The UART Driver enables the UART’s available on the device. The driver configures the UART hardware and interfaces with a number of standard linux tools (ex. stty, minicom, etc.) to enable the configuration and usage of the hardware. The H/W UARTs available will vary by SoC and system configuration.
4.2 UART
4.2.1 Overview
The UART driver can be used to send/receive raw ASCII characters from the User Interface as shown by the below diagram..
4.2.1 User Layer
The UART driver leverages the TTY framework within Linux. This framework uses typical file I/O operations to interact with the UART. This interface allows userspace modules to easily be developed to read/write the /dev/ttyxx to exchange data over the UART. Since this is a very common Linux framework, there are many standard tools that can be used to interact with it. These tools, like stty, minicom, picocom, and many others, can easily be used to exercise a UART for data exchange.

Features
- Exposes UART to User Space via /dev/tty*
- Supports multiple baud rates and UART capabilities
- Hardware Flow Control
5 Porting
5.1 Uboot porting
In uboot default enable debug uart, so do not need to modify.
5.2 Kernel porting
Index: am335x-evm.dts
uart1_pins: pinmux_uart1_pins {
pinctrl-single,pins = <
AM33XX_IOPAD(0x980, PIN_INPUT_PULLUP | MUX_MODE1) /* uart1_rxd.uart1_rxd */
AM33XX_IOPAD(0x984, PIN_OUTPUT_PULLDOWN | MUX_MODE1) /* uart1_txd.uart1_txd */
>;
};
uart2_pins: pinmux_uart2_pins {
pinctrl-single,pins = <
AM33XX_IOPAD(0x92c, PIN_INPUT_PULLUP | MUX_MODE1) /* mii1_txclk.uart2_rxd */
AM33XX_IOPAD(0x930, PIN_OUTPUT_PULLDOWN | MUX_MODE1) /* mii1_rxclk.uart2_txd */
>;
};
uart3_pins: pinmux_uart3_pins {
pinctrl-single,pins = <
AM33XX_IOPAD(0x934, PIN_INPUT_PULLUP | MUX_MODE1) /* mii1_rxd3.uart3_rxd */
AM33XX_IOPAD(0x938, PIN_OUTPUT_PULLDOWN | MUX_MODE1) /* mii1_rxd2.uart3_txd */
>;
};
&uart1 {
pinctrl-names = "default";
pinctrl-0 = <&uart1_pins>;
status = "okay";
};
&uart2 {
pinctrl-names = "default";
pinctrl-0 = <&uart2_pins>;
status = "okay";
};
&uart3 {
pinctrl-names = "default";
pinctrl-0 = <&uart3_pins>;
status = "okay";
};
6 Follow-up
Uart loop test code:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <termios.h>
#include <errno.h>
#include <pthread.h>
#include <sys/ioctl.h>
#define FALSE 1
#define TRUE 0
int fd=-1;
char buff[512];
int speed_arr[] = { B115200, B57600, B38400, B19200, B9600, B4800,
B2400, B1200};
int name_arr[] = {115200, 57600, 38400, 19200, 9600, 4800, 2400, 1200};
#define debugnum(data,len,prefix) \
{ \
unsigned int i; \
for (i = 0;i < len;i++) { \
if(prefix) \
printf("0x%02x ",data[i]); \
else \
printf("%02x ",data[i]); \
} \
}
void set_speed(int fd, int speed)
{
int i;
int status;
struct termios Opt;
tcgetattr(fd, &Opt);
for ( i= 0; i < sizeof(speed_arr) / sizeof(int); i++)
{
if (speed == name_arr[i])
{
tcflush(fd, TCIOFLUSH);
cfsetispeed(&Opt, speed_arr[i]);
cfsetospeed(&Opt, speed_arr[i]);
status = tcsetattr(fd, TCSANOW, &Opt);
if (status != 0)
perror("tcsetattr fd1");
return;
}
tcflush(fd,TCIOFLUSH);
}
}
int set_Parity(int fd,int databits,int stopbits,int parity)
{
struct termios options;
if ( tcgetattr( fd,&options) != 0)
{
perror("SetupSerial 1");
return(FALSE);
}
options.c_cflag &= ~CSIZE;
switch (databits)
{
case 7:
options.c_cflag |= CS7;
break;
case 8:
options.c_cflag |= CS8;
break;
default:
fprintf(stderr,"Unsupported data size\n");
return (FALSE);
}
switch (parity)
{
case 'n':
case 'N':
options.c_cflag &= ~PARENB;
options.c_iflag &= ~INPCK;
break;
case 'o':
case 'O':
options.c_cflag |= (PARODD | PARENB);
options.c_iflag |= INPCK;
break;
case 'e':
case 'E':
options.c_cflag |= PARENB;
options.c_cflag &= ~PARODD;
options.c_iflag |= INPCK;
break;
case 'S':
case 's':
options.c_cflag &= ~PARENB;
options.c_cflag &= ~CSTOPB;
break;
default:
fprintf(stderr,"Unsupported parity\n");
return (FALSE);
}
switch (stopbits)
{
case 1:
options.c_cflag &= ~CSTOPB;
break;
case 2:
options.c_cflag |= CSTOPB;
break;
default:
fprintf(stderr,"Unsupported stop bits\n");
return (FALSE);
}
options.c_iflag &= ~(IGNBRK|BRKINT|PARMRK|ISTRIP|INLCR|IGNCR|ICRNL|IXON);
options.c_oflag &= ~OPOST;
options.c_lflag &= ~(ECHO|ECHONL|ICANON|ISIG|IEXTEN);
/* Set input parity option */
if (parity != 'n')
options.c_iflag |= INPCK;
options.c_cc[VTIME] = 150; // 15 seconds
options.c_cc[VMIN] = 0;
tcflush(fd,TCIFLUSH); /* Update the options and do it NOW */
if (tcsetattr(fd,TCSANOW,&options) != 0)
{
perror("SetupSerial 3");
return (FALSE);
}
return (TRUE);
}
void receivethread(void)
{
int nread;
while(1)
{
if((nread = read(fd,buff,100))>0) //接收数据
{
printf("[RECEIVE] Len is %d,content is :\n",nread);
buff[nread]='\0';
printf("%s\n",buff);
}
usleep(100/**1000*/);
}
return;
}
int main(int argc, char *argv[])
{
char str[500];
pthread_t receiveid;
int c, ctrlbits;
/*
参数个数小于1则返回,按如下方式执行:
./uart_test /dev/ttyAT1
*/
if (argc < 2) {
printf("Useage: %s dev\n", argv[0]);
exit(0);
}
printf("test\n");
fd = open(argv[1], O_RDWR);
if (fd < 0){
printf("open device %s faild\n", argv[1]);
exit(0);
}
set_speed(fd,115200); //设置串口波特率
set_Parity(fd,8,1,'N'); //设置8位数据位,1位停止位,无校验等其他设置。
pthread_create(&receiveid,NULL,(void*)receivethread,NULL);//创建接收线程
while(1)
{
printf("Please Input string to send to %s\n:",argv[1]);
scanf("%s", str);
if(strlen(str)>0){
//发送数据
write(fd, str, strlen(str));
write(fd, "\n", strlen("\n"));
usleep(200*1000);
}
}
close(fd);
exit(0);
}
am335x system upgrade kernel uart(七)的更多相关文章
- am335x system upgrade kernel tf(五)
1 Scope of Document This document describes TF hardware design 2 Requiremen 2.1 Functi ...
- am335x system upgrade kernel ethernet(四)
1 Scope of Document This document describes ethernet hardware design and porting KZS8081 to ubo ...
- am335x system upgrade kernel gpio(九)
1 Hardware Overview gpio interface,pin map: AM335X_I2C0_W_C----------------------MCASP0_AXR1 /* ...
- am335x system upgrade kernel can(八)
1 Scope of Document This document describes can bus hardware design and can bus driver developm ...
- am335x system upgrade kernel i2c rtc eeprom(六)
1 Scope of Document This document describes i2c bus hardware design and support i2c-devices: ee ...
- am335x system upgrade kernel ec20 simcom7600ce(十一)
1 Scope of Document This document describes 4G hardware design, support quectel ec20 4G module/ ...
- am335x system upgrade kernel usb stroage(十)
1 Scope of Document This document describes USB hardware design, support stardard usb2.0 port o ...
- am335x system upgrade kernel f-ram fm25l16b(十六)
1 Scope of Document This document describes SPI F-RAM hardware design 2 Requiremen 2.1 ...
- am335x system upgrade kernel emmc(十八)
1 Scope of Document This document describes EMMC hardware design 2 Requiremen 2.1 Func ...
随机推荐
- Python开发【源码剖析】 List对象
前言 本文探讨的Python版本为2.7.16,可从官网上下载,把压缩包Python-2.7.16.tgz解压到本地即可 需要基本C语言的知识(要看的懂) PyListObject对象 PyListO ...
- Jmeter+Ant+Jenkins构建接口自动化测试平台(Windows)
一.首先先介绍下我的环境: 1. win10系统 2. ant版本:apache-ant-1.10.1(作用:执行脚本,便于后期的持续集成,下载地址:http://ant.apache.org/bin ...
- HDU6037 Expectation Division 期望、高维前缀和
传送门 设\(f_x\)表示答案,那么\(f_x = \frac{\sum\limits_{d \mid x} f_d}{\sigma_0(x)} + 1 = \frac{\sigma_0(x) + ...
- 服务端技术选型与考虑(go)
- docker 执行 docker system prune 导致Azure Devops build镜像失败
运行docker的centos上, 只分配了16G的空间, 装了个mysql, 还有个rancher, 就只剩下2G的空间了, Azure Devops build镜像就出错了, 显示存储空间不足, ...
- BUAA_OO第四单元总结性博客作业——UML(Floyd实现规则检查?)
一.架构设计 1.UML第一次作业——类图 第一次作业基于不同element在UML规格中的从属关系来设计架构.继承了UmlInteraction接口的MyUmlInteraction类是主要的交互层 ...
- Matlab单例模式
classdef SingletonClass < handle methods(Access = private) function obj = SingletonClass() disp(' ...
- JS函数的三种方式
函数,一段能够自动完成某些功能的代码块,函数的出现,既解决了重复使用重一功能的需求,又可以避免代码的臃肿性. 使用函数有两个要求:必须调用后才可以执行;函数名不要和关键字以及系统函数相同; 函数主要有 ...
- PHP写的简单数字验证码
用PHP写的随机生成的5位数字验证码 $yzm = ""; for($i=0;$i<5;$i++) { $a = rand(0,9); $yzm.= $a; } echo $ ...
- Android gradle用exclude排除引用包中的dependency引用
项目突然编译不通过,报如下错误 FAILURE: Build failed with an exception. * What went wrong: Execution fai ...