ROS机器人程序设计(原书第2版)补充资料 (玖) 第九章 导航功能包集进阶 navigation
ROS机器人程序设计(原书第2版)补充资料 (玖) 第九章 导航功能包集进阶 navigation
书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用。
第8-9章,主要介绍仿真,仿真机器人与实际原理上其实差别不大,细节配置上有些不同,除了书中的示例,
这里主要还推荐turtlebot_gazebo仿真,源码非常详细具体。
第241-243页:
介绍机器人配置情况,参数配置多以.yaml文件格式。
第244-246页:
配置全局和局部代价地图,基本参数等,非常重要。
第247页:
配置对应的launch文件,进行参数加载。
第248-256页:
主要是配置和使用可视化工具rviz。
第257页:
简单解释自适应蒙特卡罗定位AMCL,有时机器人会原地转圈,可能就是依据地图在自定位。
第258页:
修改参数。
第259页:
机器人避障。
第260-262页:
机器人依据目标,自主导航运动。
第263页:
本章小节。
巩固与思考:
如何编写算法,实现机器人依据激光定位并进行室内导航巡逻或清扫算法。
补充学习:
Make a map and navigate with it
Description: Use the navigation stack to create a map of the Gazebo world and start navigation based on it.
Keywords: simulation, gazebo, map building, navigation
Tutorial Level: INTERMEDIATE
|
Make a map and Navigation in Gazebo simulation . |
Overview
In this tutorial we will create a map of a virtual world and then use it to navigate around. Basically we will reproduce build a map and navigate a map TurtleBot tutorials in a simulated world. So if you have doubts about using the navigation stack with TurtleBot those tutorials will probably help you.
Make a map
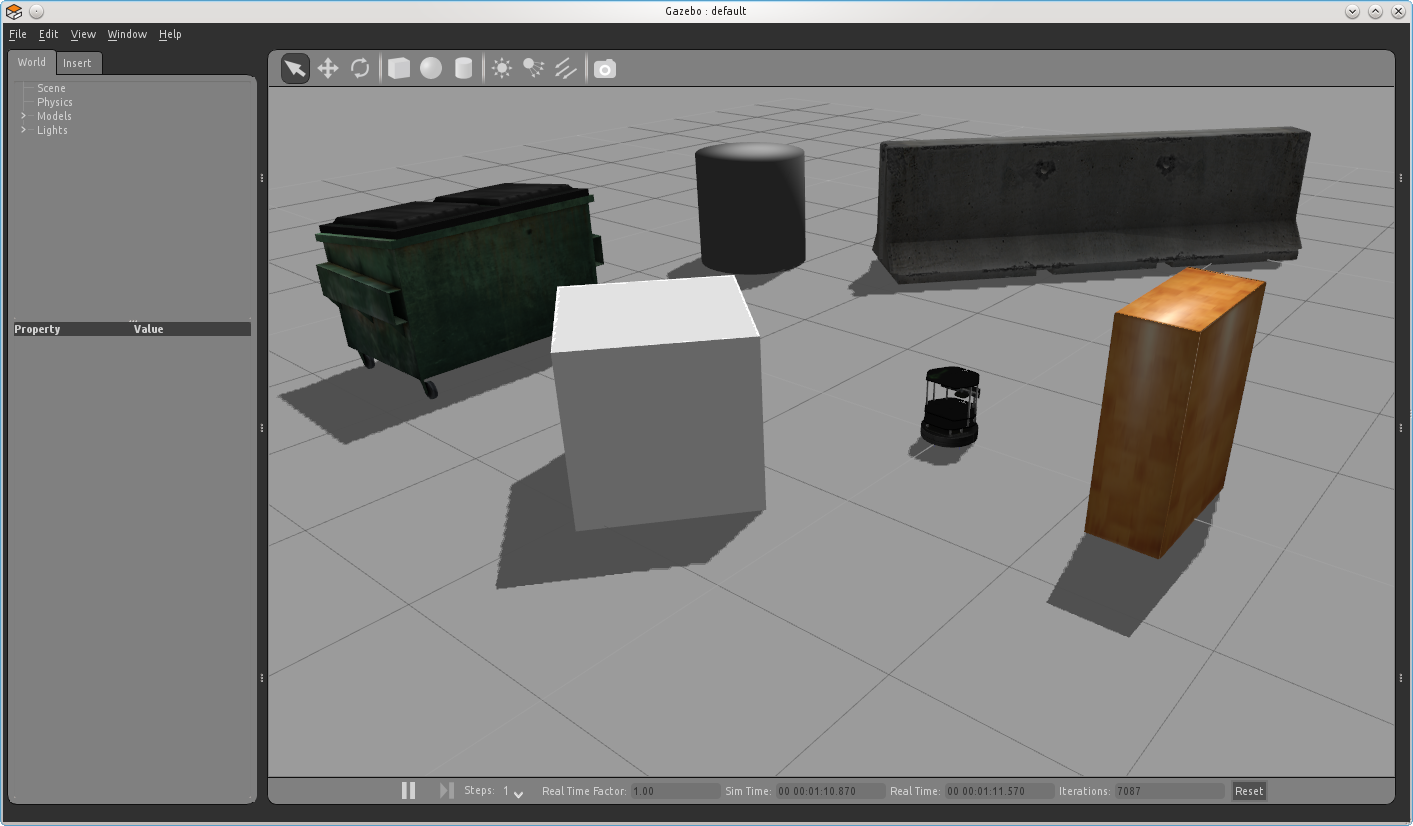
First, bring up the TurtleBot simulation as described in the Gazebo Bringup Guide, but this time we will load a slightly funnier world:
$ source /opt/ros/indigo/setup.bash
$ roslaunch turtlebot_gazebo turtlebot_world.launch
The playground world with a TurtleBot2 looks like this:
Alternatively you can use another existing world file like this:
$ roslaunch turtlebot_gazebo turtlebot_world.launch world_file:=worlds/willowgarage.world
Tip: of course you can also make your own world! With Gazebo it's not difficult, but is beyond the scope of this tutorial.
You can customize your simulated TurtleBot by setting TURTLEBOT_XXX environment variables; for example:
$ export TURTLEBOT_BASE=create
$ export TURTLEBOT_STACKS=circles
$ export TURTLEBOT_3D_SENSOR=asus_xtion_pro
$ roslaunch turtlebot_gazebo turtlebot_playground.launch
will simulate a TurtleBot 1 with an Asus Xtion Pro camera.
To start map building, type:
roslaunch turtlebot_gazebo gmapping_demo.launch
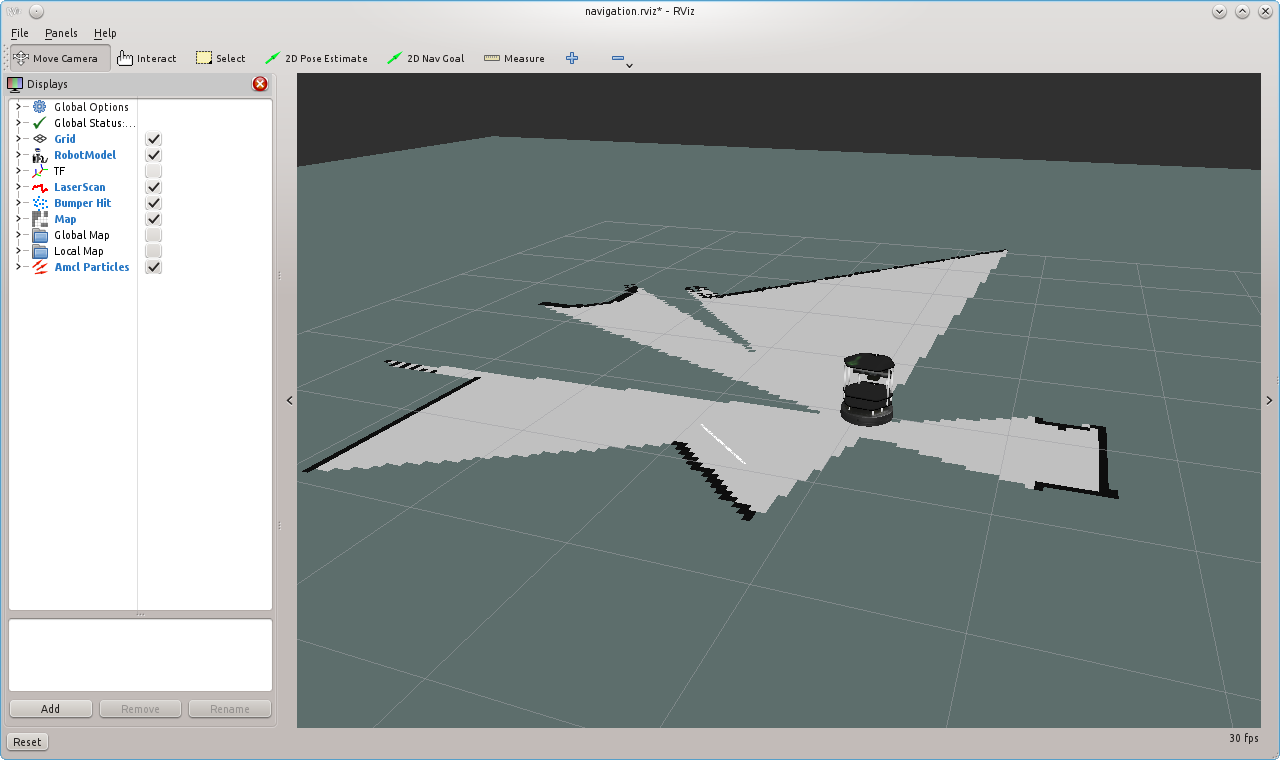
Use RViz to visualize the map building process:
$ roslaunch turtlebot_rviz_launchers view_navigation.launch
Then, as explained in the previous tutorial, use your favorite teleoperation tool to drive the TurtleBot around the world, until you get satisfied with your map. This capture shows the mapping process after turning 360 degrees.
Finally, save the map to disk:
$ rosrun map_server map_saver -f <your map name>
Navigate the playground
To be sure that all will run as expected, kill all you launched in the previous section and repeat all steps except the map building. Instead, type:
roslaunch turtlebot_gazebo amcl_demo.launch map_file:=<full path to your map YAML file>
Or if you prefer to use an already created map, just omit the map_file argument.
Now you can send the robot anywhere in the playground with RViz, same way as explained on navigate a map tutorial.
ROS机器人程序设计(原书第2版)补充资料 (玖) 第九章 导航功能包集进阶 navigation的更多相关文章
- ROS机器人程序设计(原书第2版)补充资料 (捌) 第八章 导航功能包集入门 navigation
ROS机器人程序设计(原书第2版)补充资料 (捌) 第八章 导航功能包集入门 navigation 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中 ...
- ROS机器人程序设计(原书第2版)补充资料 教学大纲
ROS机器人程序设计(原书第2版) 补充资料 教学大纲 针对该书稍后会补充教学大纲.教案.多媒体课件以及练习题等. <ROS机器人程序设计>课程简介 课程编号:XXXXXX 课程名称:RO ...
- ROS机器人程序设计(原书第2版)补充资料 (拾) 第十章 使用MoveIt!
ROS机器人程序设计(原书第2版)补充资料 (拾) 第十章 使用MoveIt! 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. MoveIt ...
- ROS机器人程序设计(原书第2版)补充资料 (零) 源代码、资料和印刷错误修订等 2017年01月01日更新
ROS机器人程序设计(原书第2版)补充资料 (零) 源代码等 ROS官网 版)部分内容修订 页:第1行,删去$ 页:第6行,float64 y 前面加一个空格 页:中间创建主题:下面程序不用换行,(& ...
- ROS机器人程序设计(原书第2版)学习镜像分享及使用说明
ROS机器人程序设计(原书第2版)学习镜像分享及使用说明 系统用于ROS爱好者学习交流,也可用于其他用途,并不局限于ROS. 这款镜像文件是基于一年前的Ubuntu ROS Arduino Gazeb ...
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- ROS机器人程序设计(原书第2版)补充资料 (陆) 第六章 点云 PCL
ROS机器人程序设计(原书第2版)补充资料 (陆) 第六章 点云 PCL 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. RGBD深度摄像头 ...
- ROS机器人程序设计(原书第2版)补充资料 (伍) 第五章 计算机视觉
ROS机器人程序设计(原书第2版)补充资料 (伍) 第五章 计算机视觉 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 计算机视觉这章分为两 ...
- ROS机器人程序设计(原书第2版)补充资料 (肆) 第四章 在ROS下使用传感器和执行器
ROS机器人程序设计(原书第2版)补充资料 (肆) 第四章 在ROS使用传感器和执行器 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 第四 ...
随机推荐
- java中匿名内部类的应用
如果某一个类实现了接口,而且仅仅在程序代码中使用了一次,那么就没必要单独定义该方法,可以通过接口来定义匿名内部类 interface Message{ public void print(); } p ...
- [LeetCode] Stickers to Spell Word 贴片拼单词
We are given N different types of stickers. Each sticker has a lowercase English word on it. You wou ...
- [LeetCode] Monotone Increasing Digits 单调递增数字
Given a non-negative integer N, find the largest number that is less than or equal to N with monoton ...
- SpringIOC学习二
Spring的IOC容器通过依赖注入DI(dependency injection)来实现程序之间的依赖关系,达到解耦的方式依赖的方式:a.基于xml文件配置的注入 * 构造函数注入 * ...
- [POI2009]KAM-Pebbles
题目描述 Johny and Margaret are playing "pebbles". Initially there is a certain number of pebb ...
- NOIP2015-D2T3运输计划
题目背景 公元 2044 年,人类进入了宇宙纪元. 题目描述 L 国有 n 个星球,还有 n-1 条双向航道,每条航道建立在两个星球之间,这 n-1 条航道连通了 L 国的所有星球. 小 P 掌管一家 ...
- bzoj 1899: [Zjoi2004]Lunch 午餐
Description 上午的训练结束了,THU ACM小组集体去吃午餐,他们一行N人来到了著名的十食堂.这里有两个打饭的窗口,每个窗口同一时刻只能给一个人打饭.由于每个人的口味(以及胃口)不同,所以 ...
- [bzoj1041][HAOI2008]圆上的整点
我能想得出怎么做才奇怪好吗 题解:http://blog.csdn.net/csyzcyj/article/details/10044629 #include<iostream> #inc ...
- (转)SQL中的循环、for循环、游标
我们使用SQL语句处理数据时,可能会碰到一些需要循环遍历某个表并对其进行相应的操作(添加.修改.删除),这时我们就需要用到咱们在编程中常常用的for或foreach,但是在SQL中写循环往往显得那么吃 ...
- 运行eclipse java virtual machine launcher 什么错误
在MyEclipse的安装目录eclipse有个eclipse.ini文件原来的配置如下:-showsplashcom.genuitec.myeclipse.blue.product.ide--lau ...