ARM实验5 —— 按键中断实验
key_int按键中断实验
实验内容:
通过开发板上的按键中断控制led灯进行跑马灯并打印信息。
通过简单事例说明猎户座4412处理器的GIC中断处理的应用,设置key2按键连接的引脚为中断模式,当识别按键被按下时进入相应的中断处理函数
实验目的:
熟悉开发环境的使用
掌握猎户座4412处理器的中断过程及编程。
实验平台:
fs4412开发板,eclipse,secureCRT。
实验步骤:

对外设进行使能:
1.查看key2在开发板的位置:
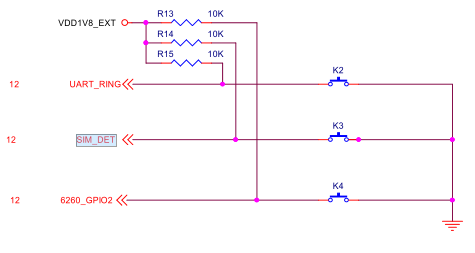
2.查看UART_RING在核心板的位置:

3.查看GPX1在芯片手册的位置:
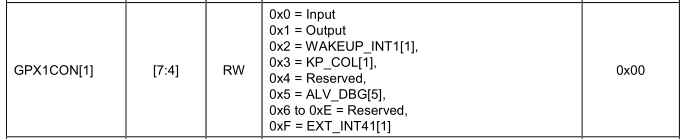
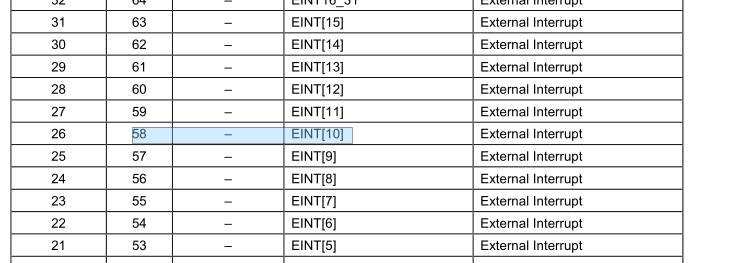
4.查看GPX1的中断源:

5.设置TXT_INT41[1]为下降沿触发。

6.使能TXT_INT41[1]

实验代码
#include "exynos_4412.h"
typedef enum
{
false,
true
}bool;
void do_irq()
{
// 获取中断号
unsigned int irq_num = CPU0.ICCIAR & 0x3ff;
switch(irq_num)
{
case :
printf("This interrupt id is %d\n", irq_num); led_isOn(true);
mydelay_ms();
led_isOn(false);
//mydelay_ms(1000); EXT_INT41_PEND = 0x1 << ; // 清pend(置1清0)
ICDICPR.ICDICPR1 = 0x1 << ; // 清中断使能位
break;
case :
printf("58This interrupt id is %d\n", irq_num);
break;
default:
printf("Interrupt is not exist!\n");
break;
} // 把处理器中处理完的中断号返回给gic
// 告诉gic该中断处理结束,可以送入下一个pending进入
CPU0.ICCEOIR = (CPU0.ICCEOIR & ~(0x3ff)) | irq_num;
} void peripheral_init()
{
GPX1.CON = 0xf << ; // 配置GPIO为外部中断
EXT_INT41_CON = 0x2 << ; // 下降沿触发中断
EXT_INT41_MASK = 0x0; // 使能相应外设
} void gic_init()
{
ICDDCR = 0x1; // 使能中断到分配器
ICDISER.ICDISER1 = 0x1 << ; // 使能按键中断号
CPU0.ICCICR = 0x1; // 把中断从cpu接口送入处理器
// 屏蔽中断优先级,255表示所有中断都允许通过
CPU0.ICCPMR = 0xff;
ICDIPTR.ICDIPTR14 = 0x1 << ; // 选择cpu接口
} void mydelay_ms(int ms)
{
int i, j;
while(ms--)
{
for (i = ; i < ; i++)
for (j = ; j < ; j++);
}
} void len_init(){
GPX1.CON = (GPX1.CON& (~0xf)) | 0x1;
GPF3.CON = GPF3.CON | (0x1<<);
GPF3.CON = GPF3.CON | (0x1<<);
GPX2.CON = GPX2.CON & (~(0xf<<)) | (0x1<<);
}
void led_isOn(bool bFlag)
{
if(bFlag == false)
GPX2.DAT &= ~(0x1<<); // led is off
else
GPX2.DAT |= 0x1<<; // LED is on mydelay_ms(); if(bFlag == false)
GPX1.DAT &= ~0x1; // led is off
else
GPX1.DAT |= 0x1; // LED is on mydelay_ms();
if(bFlag == false)
GPF3.DAT &= ~(0x1<<); // led is off
else
GPF3.DAT |= 0x1<<; // LED is on
mydelay_ms(); if(bFlag == false)
GPF3.DAT &= ~(0x1<<); // led is off
else
GPF3.DAT |= 0x1<<; // LED is on }
int main()
{
peripheral_init();
gic_init(); len_init(); int i = ;
while()
{
printf("i = %d\n", i++);
mydelay_ms();
} return ;
}
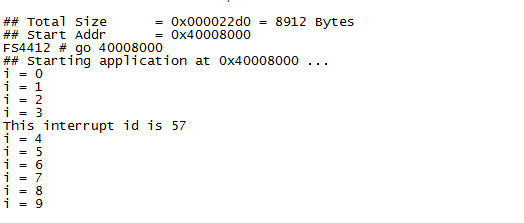
实验结果;
拓展:根据key2 的代码写一个key3 的代码。
查看k3在开发板的位置:

查看SIM_DET 在核心板的位置;

查看GPX1_2在芯片手册的位置;
中断源:
代码:
/*
* main.c
*
* Created on: 2018-9-24
* Author: Administrator
*/ #include"exynos_4412.h"
typedef enum
{
false,
true
}bool; void do_irq()
{
// 获取中断号
unsigned int irq_num = CPU0.ICCIAR & 0x3ff;
switch(irq_num)
{ case :
printf("58This interrupt id is %d\n", irq_num);
led_isOn(true);
mydelay_ms();
led_isOn(false);
//mydelay_ms(1000); EXT_INT41_PEND = 0x1 << ; // 清pend(置1清0)
ICDICPR.ICDICPR1 = 0x1 << ; // 清中断使能位 break;
default:
printf("Interrupt is not exist!\n");
break;
} // 把处理器中处理完的中断号返回给gic
// 告诉gic该中断处理结束,可以送入下一个pending进入
CPU0.ICCEOIR = (CPU0.ICCEOIR & ~(0x3ff)) | irq_num;
} void peripheral_init()
{
GPX1.CON = 0xf << ; // 配置GPIO为外部中断
EXT_INT41_CON = 0x2 << ; // 下降沿触发中断
EXT_INT41_MASK = 0x0; // 使能相应外设
} void gic_init()
{
ICDDCR = 0x1; // 使能中断到分配器
ICDISER.ICDISER1 = 0x1 << ; // 使能按键中断号
CPU0.ICCICR = 0x1; // 把中断从cpu接口送入处理器
// 屏蔽中断优先级,255表示所有中断都允许通过
CPU0.ICCPMR = 0xff;
ICDIPTR.ICDIPTR14 = 0x1 << ; // 选择cpu接口
} void len_init(){
GPX1.CON = (GPX1.CON& (~0xf)) | 0x1;
GPF3.CON = GPF3.CON | (0x1<<);
GPF3.CON = GPF3.CON | (0x1<<);
GPX2.CON = GPX2.CON & (~(0xf<<)) | (0x1<<);
}
void led_isOn(bool bFlag)
{
if(bFlag == false)
GPX2.DAT &= ~(0x1<<); // led is off
else
GPX2.DAT |= 0x1<<; // LED is on mydelay_ms(); if(bFlag == false)
GPX1.DAT &= ~0x1; // led is off
else
GPX1.DAT |= 0x1; // LED is on mydelay_ms();
if(bFlag == false)
GPF3.DAT &= ~(0x1<<); // led is off
else
GPF3.DAT |= 0x1<<; // LED is on
mydelay_ms(); if(bFlag == false)
GPF3.DAT &= ~(0x1<<); // led is off
else
GPF3.DAT |= 0x1<<; // LED is on } void mydelay_ms(int ms)
{
int i, j;
while(ms--)
{
for (i = ; i < ; i++)
for (j = ; j < ; j++);
}
} int main(){
peripheral_init();
gic_init();
len_init();
int i = ;
while()
{
printf("i = %d\n", i++);
mydelay_ms();
} return ;
}
拓展二,由原先的中断使用CPU0,改为使用cpu1;
代码
#include "exynos_4412.h"
typedef enum
{
false,
true
}bool;
void do_irq()
{
// 获取中断号
unsigned int irq_num = CPU0.ICCIAR & 0x3ff;
switch(irq_num)
{
case :
printf("This interrupt id is %d\n", irq_num); led_isOn(true);
mydelay_ms();
led_isOn(false);
//mydelay_ms(1000); EXT_INT41_PEND = 0x1 << ; // 清pend(置1清0)
ICDICPR.ICDICPR1 = 0x1 << ; // 清中断使能位
break;
case :
printf("58This interrupt id is %d\n", irq_num);
break;
default:
printf("Interrupt is not exist!\n");
break;
} // 把处理器中处理完的中断号返回给gic
// 告诉gic该中断处理结束,可以送入下一个pending进入
CPU0.ICCEOIR = (CPU0.ICCEOIR & ~(0x3ff)) | irq_num;
} void peripheral_init()
{
GPX1.CON = 0xf << ; // 配置GPIO为外部中断
EXT_INT41_CON = 0x2 << ; // 下降沿触发中断
EXT_INT41_MASK = 0x0; // 使能相应外设
} void gic_init()
{
ICDDCR = 0x1; // 使能中断到分配器
ICDISER.ICDISER1 = 0x1 << ; // 使能按键中断号
CPU1.ICCICR = 0x1; // 把中断从cpu接口送入处理器
// 屏蔽中断优先级,255表示所有中断都允许通过
CPU1.ICCPMR = 0xff;
ICDIPTR.ICDIPTR14 = 0x1 << ; // 选择cpu接口
} void mydelay_ms(int ms)
{
int i, j;
while(ms--)
{
for (i = ; i < ; i++)
for (j = ; j < ; j++);
}
} void len_init(){
GPX1.CON = (GPX1.CON& (~0xf)) | 0x1;
GPF3.CON = GPF3.CON | (0x1<<);
GPF3.CON = GPF3.CON | (0x1<<);
GPX2.CON = GPX2.CON & (~(0xf<<)) | (0x1<<);
}
void led_isOn(bool bFlag)
{
if(bFlag == false)
GPX2.DAT &= ~(0x1<<); // led is off
else
GPX2.DAT |= 0x1<<; // LED is on mydelay_ms(); if(bFlag == false)
GPX1.DAT &= ~0x1; // led is off
else
GPX1.DAT |= 0x1; // LED is on mydelay_ms();
if(bFlag == false)
GPF3.DAT &= ~(0x1<<); // led is off
else
GPF3.DAT |= 0x1<<; // LED is on
mydelay_ms(); if(bFlag == false)
GPF3.DAT &= ~(0x1<<); // led is off
else
GPF3.DAT |= 0x1<<; // LED is on }
int main()
{
peripheral_init();
gic_init(); len_init(); int i = ;
while()
{
printf("i = %d\n", i++);
mydelay_ms();
} return ;
}
结果

ARM实验5 —— 按键中断实验的更多相关文章
- cc2530的第三次实验,按键中断控制流水灯
cc2530的第三次实验:按键中断控制流水灯 效果为按一次按键,流水灯亮一次 实验相关电路图: 实验相关寄存器: 初始化函数 //初始化LED灯 //设置P1SEL,通用为0,外设为1 1111110 ...
- 【黑金ZYNQ7000系列原创视频教程】06.ZYNQ来自FPGA的中断——按键中断实验
黑金论坛地址: http://www.heijin.org/forum.php?mod=viewthread&tid=36640&extra=page%3D1 爱奇艺地址: http: ...
- FPGA与simulink联合实时环路系列——实验三 按键key
实验三 按键key 实验内容 在FPGA的实验中,经常涉及到按键的使用,按键是必不可少的人机交互的器件之一,在这些实验中,有时将按键的键值读取显示到数码管.LCD或者是通过串口传送到PC的串口助手上进 ...
- u-boot中断功能初步分析之---------按键中断
作者:彭东林 邮箱:pengdonglin137@163.com QQ: 405728433 以前一直有个疑问,在U-boot下到底能不能使用中断,为了验证这个问题,于是乎,昨天晚上我在自己的 TQ2 ...
- S02_CH08_ ZYNQ 定时器中断实验
S02_CH08_ ZYNQ 定时器中断实验 上一章实现了PS接受来自PL的中断,本章将在ZYNQ的纯PS里实现私有定时器中断.每隔一秒中断一次,在中断函数里计数加1,通过串口打印输出. 8.1中断原 ...
- 嵌入式02 STM32 实验08 外部中断
一.中断 由于某个事件的发生,CPU暂停当前正在执行的程序,转而执行处理事件的一个程序.该程序执行完成后,CPU接着执行被暂停的程序.这个过程称为中断.(我正在捉泥鳅,但是我妈喊我回家吃饭,我必须回家 ...
- 基于ZYNQ 的UART中断实验之串口写数据到DDR3中
1.参考 UG585 网络笔记 2.理论知识 参见上一次实验:基于ZYNQ 的UART中断实验 3.实验目的 练习使用UART的中断实验,并将接收到的数据写入到DDR3中. 4.实验过程 建立工程,设 ...
- S02_CH09_UART串口中断实验
S02_CH09_UART串口中断实验 本章的UART中断将在之前PL_PS中断和定时器中断上推导出来,因此本章有点难度,如果前两章还不是很熟悉的话,需要返回到前面两章把这两章的内容再次消化一下,再来 ...
- CC2530学习路线-基础实验-GPIO 按键控制LED灯亮灭(2)
目录 1.前期预备知识 1.1 新大陆Zigbee模块按键电路图 1.2 CC2530相关寄存器 1.3 CC2530中断走向图 1.4 使用C语言为51单片机编写中断程序 1.5 *函数指针 2. ...
随机推荐
- js删除数组中的 "NaN"
[注意] js中的NaN不和任何值相等,包括自身 所以可以使用 x!=x 来判断x是否是NaN,当且仅当x为NaN时,表达式的结果为true NaN != NaN ; //true 可以依此删除数组中 ...
- 解决mac下ssh空闲一段时间自动断开的问题
之前在公司就遇到过这种问题,使用ssh登录linux服务器后,在后台放置一段时间,会发现会自动断开,解决的方法很简单: vim /etc/ssh/ssh_config 添加这2句即可 ServerAl ...
- Photoshop入门教程(一):文本新建与概念解析
写在开头 <Photoshop实用入门>系列教程可能对于一点都没有接触过Photoshop的人来说不太容易接受,因为本教程并没有细致到教你如何使用画笔工具等一系列很基础的东西,有些地方的讲 ...
- python学习:python文件中空格和换行符的捕获和文本文件的转存
0. 背景 之前公司的项目中,需要在嵌入式系统中实现一个http的网页端内容,由于项目历史遗留问题,公司是采用的将html文件转成c语言头文件的方式,每次修改页面端都需要从新编译一下程序,非常的繁琐. ...
- B树与B+
简单剖析B树(B-Tree)与B+树https://blog.csdn.net/z_ryan/article/details/79685072 B树和B+树的插入.删除图文详解https://www. ...
- 用NaviCat创建存储过程批量添加测试数据
打开navicat连接上数据库,然后打开左上角函数,新建一个函数. BEGIN DECLARE i int; --声明变量 DECLARE groupid int; set i=LAST_INSERT ...
- JavaSE---位运算符
1.Java支持的位运算符有7个: &:按位与 [2个相同取相同.2个不同取0] |:按位或 [2个相同取相同.2个不同取1] ~:按位非 ^:按位异或 [2个相同取0.2个不同取1] < ...
- 5W1H
WHY ——为什么做?原因与目标 WHAT ——做什么?目标与内容 WHO ——谁去做?具体的执行者 WHEN ——什么时间做?执行时间 WHERE——在什么地方做?执行地点 HOW——怎样做 ...
- Golang常用数据结构(对照python)
python golang init get set extend/update find index size loop list list l := list.New() l.PushBack ...
- Easy Touch 摇感控制人物移动
Easy Touch 摇感控制人物移动 public class joystick : MonoBehaviour { public float Speed; //定义速度 p ...