【论文阅读】BEVFormer: Learning Bird's-Eye-View Representation from Multi-Camera Images via Spatiotemporal
论文题目:BEVFormer: Learning Bird’s-Eye-View Representation from Multi-Camera Images via Spatiotemporal Transformers
参考与前言
arXiv 地址:
github代码地址(还没开,六月开):https://github.com/zhiqi-li/BEVFormer
整篇文章方法挺清晰的 理解起来不费劲
1. Motivation
做的任务是:3D detection,主要是提出使用BEV的表达方式去做感知类任务
问题场景
Perception in 3D space
因为整篇是拿相机在做表达和任务,所以先是说明相机优势:identify vision-based road elements (e.g., traffic lights, stoplines);指出BEV优势:清晰的表述了物体的位置和大小,比较适合自动驾驶里感知和规划的任务,同时连接了 temporal 和 spatial space,时空两个空间
同时指出现有的BEV方案:1. 2D plane,2. 从深度信息获取特征,对深度值和深度分布太敏感
因为基于BEV方法的detection performance 会受 compounding error和BEV特征的影响,所以我们提出了一种 不受深度信息,同时无需严格依靠3d prior 学习BEV的方法
Contribution
- 提出一种 以多相机和时间作为输入的,时空transformer encoder
We propose BEVFormer, a spatiotemporal transformer encoder that projects multi-camera and/or timestamp input to BEV representations. - 设计了通过在空间上的cross-attention,和时间上的self-attention,设计 learnable BEV queries 去做时域上的结合,然后加到Unified BEV 特征中
- 做nuScenes和Waymo的detection任务重取得了不错的效果
相关工作中介绍了 基于transformer-based 2D perception,和基于相机的 3D Perception
问题区:
cross-camera post-processing
是指将相机进行坐标转换 把数据对其嘛?还是啥? → 好像就是多相机的处理
3d prior是指不同相机之间的外参嘛?所以是指的是减弱外参在整个框架中的先验?
2. Method
2.1 框架
框架图挺清晰,从输入是六个角度的相机,通过一个可选的backbone(比如resnet101)
- 每张照片都得到一个 feature \(F_t^i\) 其中 i 指代第 i 个相机,合起来就是得到一个 \(F_t=\{F_t^i\}_{i=1}^{N_{\text{view}}}\)
- BEV Queries Q 是 gird-shaped learnable parameter \(Q \in \R^{H\times W \times C}\) H, W就是空间下BEV平面的大小,在 点\(p=(x, y)\) 下的 \(Q_p \in \R^{1 \times C}\) 和其对应的BEV plane grid cell region有关,每个格都代表现实世界中s米的范围长度(s分辨率
对 queries Q里同样加入learnable的positional embedding

2.2 Spatial Cross-Attention 空间域
过程可以用该公式概括:
\]
对于每个 \(Q_p\) 我们都有一个project function \(\mathcal P(p,i,j)\) 以获取 i-th相机下的 j-th 参考点
从现实坐标 \((x',y')\) 中 找到对应的query p=(x,y) 下 \(Q_p\) :
\]
同时因为在(x’,y’)上的物体也会有z上的高度,所以对于每个query \(Q_p\) 我们会得到 a pillar of 3D 参考点 \(\left(x^{\prime}, y^{\prime}, z_{j}^{\prime}\right)_{j=1}^{N_{\mathrm{ref}}}\) 然后通过projection matrix投到对应的相机下
\]
其中\(T_i \in \R^{3\times 4}\) 就是第i个相机的projection matrix
2.3 Temporal Self-Attention 时间域
主要是要拿上一个输出的 BEV \(B_t\) 作为输入
\]
不同于vanilla deformable attention,这个offsets \(\Delta p\) 是从此处 concate \(\{Q, B’_{t-1}\}\) 预测而出
问题区:
R-101 DCN 没找到... 搜了一下 相关Github: https://github.com/open-mmlab/mmdetection/blob/master/configs/dcn/README.md
是resnet 101 卷积核可变吗?【15, 12】 实验中 用了两个backbone进行对比
projection matrix是到车中心?
只要是一个中心就行..
开始咋处理? 上一帧输入 BEV \(B_t\)
重复 Q,
3. 实验及结果
实现细节上:
- 选择t时,是从相邻2s时间内随机采样而来,减少ego-motion的diversity,比如四个采样:\(t-3,t-2,t-1, t\),由此可得到:\(\left\{B_{t-3}, B_{t-2}, B_{t-1}\right\}\)
- 因为 \(B_t\) 是基于多相机and \(B_{t-1}\)的,所以\(B_t\) 包含four samples的时空域clues
Loss function是根据 任务定义而来的,比如detection、segmentation等
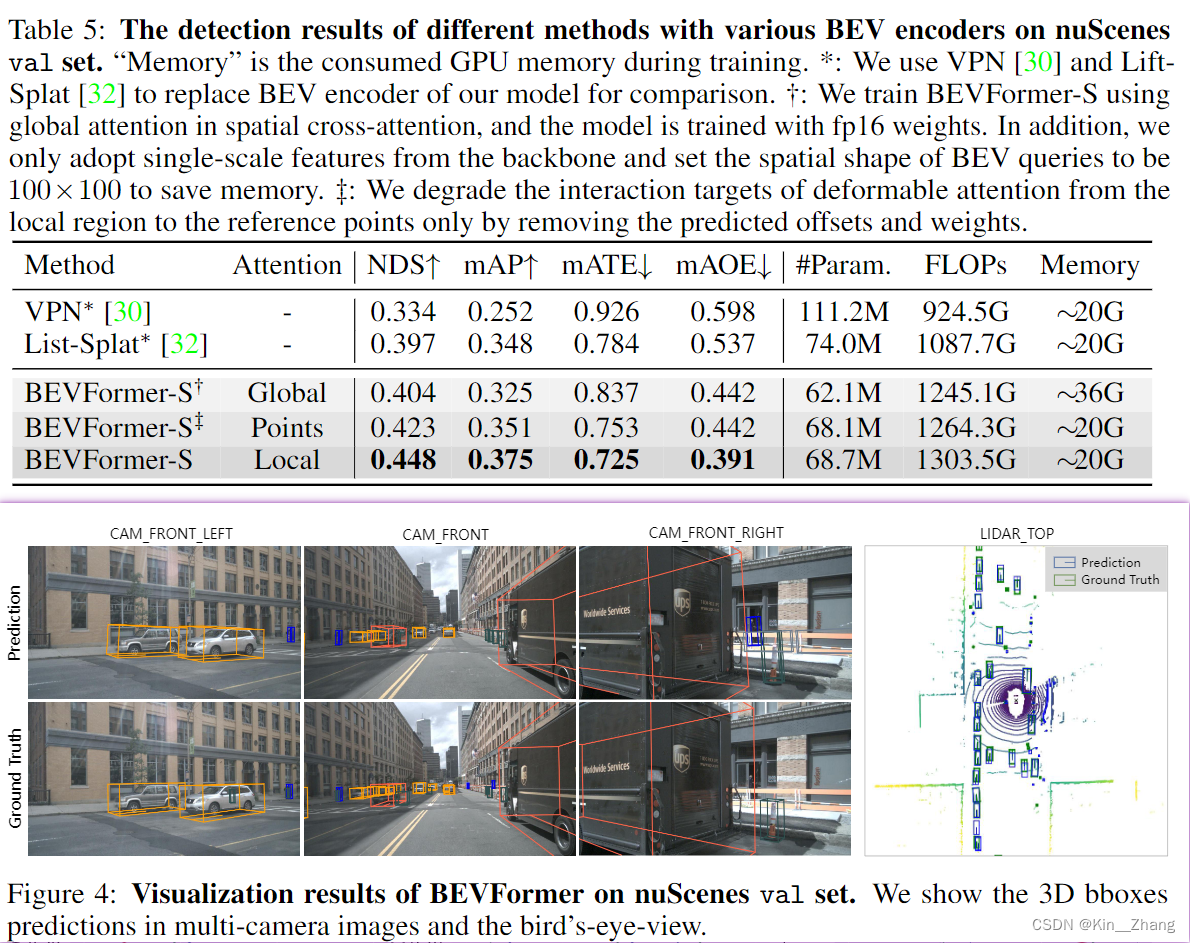
结果表

nuScenes 数据集

waymo数据集
4. Conclusion
提出BEVFormer,验证其效果不错
limitation中提到了 和LiDAR-based还是有gap的,主要在effect和efficiency上(但是其实在本文表1 pointpaiting也并没有 ... effect上比BEVFormer好?可能只是这种指标下

碎碎念
代码还没开,可以等一波,但是好像知乎有人讨论说 也不一定会按时开。先就大概看看,网络方法输入输出都挺清晰的,就是感觉 emmm 效果意外的好 hhh
- 有些细节有点迷,比如x’,y’获取是内参+外参直接pixel到全局坐标系下吗?
- 估计后面跑跑 debug一下理解更深点
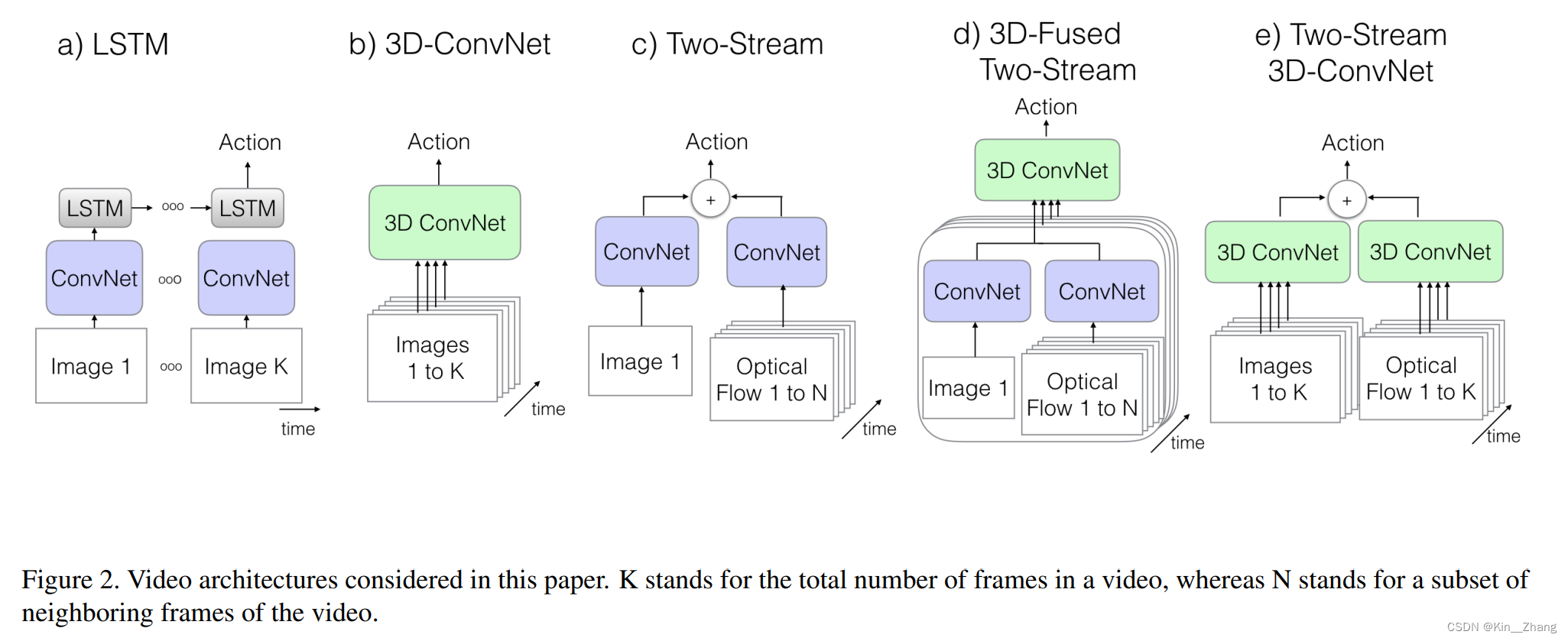
不同的方法对时间域数据上的处理方式各不相同,感觉时间域上的玩法还挺多的,比如上次MP3里面是optical flow, interesting;这种在视频领域更多一点 上次看沐神b站上有讲过I3D 3D-conv
赠人点赞 手有余香 ;正向回馈 才能更好开放记录 hhh
【论文阅读】BEVFormer: Learning Bird's-Eye-View Representation from Multi-Camera Images via Spatiotemporal的更多相关文章
- 【论文阅读】Learning Dual Convolutional Neural Networks for Low-Level Vision
论文阅读([CVPR2018]Jinshan Pan - Learning Dual Convolutional Neural Networks for Low-Level Vision) 本文针对低 ...
- 论文阅读 DyREP:Learning Representations Over Dynamic Graphs
5 DyREP:Learning Representations Over Dynamic Graphs link:https://scholar.google.com/scholar_url?url ...
- 论文阅读:Learning Visual Question Answering by Bootstrapping Hard Attention
Learning Visual Question Answering by Bootstrapping Hard Attention Google DeepMind ECCV-2018 2018 ...
- 论文阅读: End-to-end Learning of Action Detection from Frame Glimpses in Videos
End-to-End Learning of Action Detection from Frame Glimpses in Videos CVPR 2016 Motivation: 本 ...
- 【论文阅读】Learning Spatial Regularization with Image-level Supervisions for Multi-label Image Classification
转载请注明出处:https://www.cnblogs.com/White-xzx/ 原文地址:https://arxiv.org/abs/1702.05891 Caffe-code:https:// ...
- 论文阅读:Learning Attention-based Embeddings for Relation Prediction in Knowledge Graphs(2019 ACL)
基于Attention的知识图谱关系预测 论文地址 Abstract 关于知识库完成的研究(也称为关系预测)的任务越来越受关注.多项最新研究表明,基于卷积神经网络(CNN)的模型会生成更丰富,更具表达 ...
- Learning under Concept Drift: A Review 概念漂移综述论文阅读
首先这是2018年一篇关于概念漂移综述的论文[1]. 最新的研究内容包括 (1)在非结构化和噪声数据集中怎么准确的检测概念漂移.how to accurately detect concept dri ...
- Deep Reinforcement Learning for Dialogue Generation 论文阅读
本文来自李纪为博士的论文 Deep Reinforcement Learning for Dialogue Generation. 1,概述 当前在闲聊机器人中的主要技术框架都是seq2seq模型.但 ...
- 论文阅读笔记 Improved Word Representation Learning with Sememes
论文阅读笔记 Improved Word Representation Learning with Sememes 一句话概括本文工作 使用词汇资源--知网--来提升词嵌入的表征能力,并提出了三种基于 ...
- 论文阅读:Face Recognition: From Traditional to Deep Learning Methods 《人脸识别综述:从传统方法到深度学习》
论文阅读:Face Recognition: From Traditional to Deep Learning Methods <人脸识别综述:从传统方法到深度学习> 一.引 ...
随机推荐
- 构造照亮世界——快速沃尔什变换 (FWT)
博客园 我的博客 快速沃尔什变换解决的卷积问题 快速沃尔什变换(FWT)是解决这样一类卷积问题: \[c_i=\sum_{i=j\odot k}a_jb_k \] 其中,\(\odot\) 是位运算的 ...
- rails 上传文件
控制器文件 app/controllers/api/v1/order_controller.rb def create # 从本地读取 log_dir = File.expand_path(File. ...
- 04. rails入门学习 创建控制器
学习视频 https://www.bilibili.com/video/BV1RJ411W7N3?t=49&p=7 一. 启动rails 启动 cd circles/ #到circles的项目 ...
- Linux — 物理内存管理
物理内存的组织方式 物理内存是由连续的一页一页的块组成,每个物理页都有页号 每个页由struct page表示,放进数组里--平坦内存模型 SMP和NUMA SMP中,总线会称为瓶颈,因为数据都要经过 ...
- JS制作日历小事件和数码时钟--JavaScript实例集锦(初学)
运用JS的innerHTML,和for循环实现日历小部件内容和日期的转换. <!DOCTYPE html> <html> <head> <title>日 ...
- Arrays类的常用方法
Arrays类的常用方法 Array数组的工具类java.util.Arrays Arrays类中的方法都是static修饰的静态方法,在使用的时候可以直接使用类名进行调用,而不用使用对象来调用 Ar ...
- nodejs搭建chatgpt服务
5分钟快速搭建基于nodejs的chatgpt服务 写在前面 首先大家都知道,在国内是无法成功调用openapi的接口,甚至openai的官网都很难打开.所以如果想使用chatgpt的几乎是不可能,不 ...
- MyBatis-Plus 实现多租户管理的实践
本文主要讲解使用Mybatis-Plus结合dynamic-datasource来实现多租户管理 在现代企业应用中,多租户(Multi-Tenant)架构已经成为一个非常重要的设计模式.多租户架构允许 ...
- 深度学习项目-MobileNetV2水果识别模型
FruitRecognition DeepLearning深度学习小项目,利用CNN和MobileNetV2搭建的水果识别模型. github地址 fruit为本次大作业使用的数据集. geneFru ...
- java 反射——任意类型数组扩容
//java object[]无法转换为原对象类型,可以使用反射来做. //这里的参数不是传object[] 而是传object. public Object GoodArrayGrow(Object ...