专家PID控制
1、专家PID控制原理
PID专家控制的实质是,基于受控对象和控制规律的各种知识,无需知道被控对象的精确模型,利用专家经验来设计PID参数。专家PID控制是一种直接型专家控制器。
典型的二阶系统单位阶跃响应误差曲线如图2-5所示。对于典型的二阶系统阶跃响应过程作如下分析。
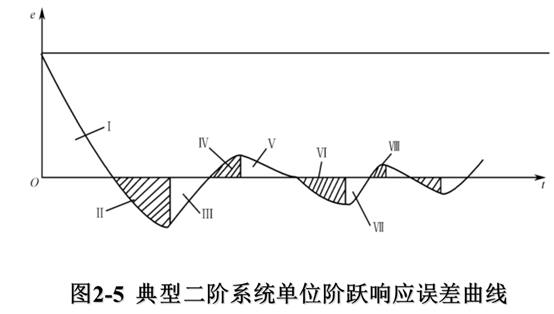
图2-5中,Ⅰ、Ⅲ、Ⅴ、Ⅶ、…区域,误差朝绝对值减小的方向变化。此时,可采取保持等待措施,相当于实施开环控制;Ⅱ、Ⅳ、Ⅵ、Ⅷ、…区域,误差绝对值朝增大的方向变化。此时,可根据误差的大小分别实施较强或一般的控制作用,以抑制动态误差。
令e(k)表示离散化的当前采样时刻的误差值,e(k-1)和e(k-2)分别表示前一个和前两个采样时刻的误差值,则有:

根据误差及其变化,可设计专家PID控制器,该控制器可分为以下五种情况进行设计:
(1)当|e(k)|>M1 时,说明误差的绝对值已经很大。不论误差变化趋势如何,都应考虑控制器的输出应按最大(或最小)输出,以达到迅速调整误差,使误差绝对值以最大速度减小。此时,它相当于实施开环控制。
(2)当e(k)Δe(k)>0或 Δe(k)=0时,说明误差在朝误差绝对值增大方向变化,或误差为某一常值,未发生变化。
此时,如果|e(k)|≥M2,说明误差也较大,可考虑由控制器实施较强的控制作用,以达到扭转误差绝对值朝减小方向变化,并迅速减小误差的绝对值,控制器输出为:

如果 |e(k)|<M2,说明尽管误差朝绝对值增大方向变化,但误差绝对值本身并不很大,可考虑控制器实施一般的控制作用,只要扭转误差的变化趋势,使其朝误差绝对值减小方向变化,控制器输出为

(3)当e(k)Δe(k)<0、Δe(k)Δe(k-1)>0或者e(k)=0 时,说明误差的绝对值朝减小的方向变化,或者已经达到平衡状态。此时,可考虑采取保持控制器输出不变。
(4)当e(k)Δe(k)<0、Δe(k)Δe(k-1)<0时,说明误差处于极值状态。如果此时误差的绝对值较大,即|e(k)|≥M2 ,可考虑实施较强的控制作用。

如果此时误差的绝对值较小,即|e(k)|<M2,可考虑实施较弱的控制作用

(5)当e(k)<ε时,说明误差的绝对值很小,此时加入积分,减少稳态误差。
以上各式中:
em(k)为误差e的第k个极值;
u(k)为第k次控制器的输出;
k1为增益放大系数,k1>1;
k2为抑制系数,0<k2<1;
M1,M2为设定的误差界限,M1>M2>0

专家PID控制的更多相关文章
- 专家PID控制仿真学习
目录 专家控制 专家系统 专家控制 学习笔记,用于记录学习 资料:<智能控制>(第四版)--刘金琨 专家系统 一.专家系统的定义 专家系统是一类包含知识和推理的智能计算机程序,其内部包含某 ...
- PID控制器开发笔记之十一:专家PID控制器的实现
前面我们讨论了经典的数字PID控制算法及其常见的改进与补偿算法,基本已经覆盖了无模型和简单模型PID控制经典算法的大部.再接下来的我们将讨论智能PID控制,智能PID控制不同于常规意义下的智能控制,是 ...
- 专家PID
前面我们讨论了经典的数字PID控制算法及其常见的改进与补偿算法,基本已经覆盖了无模型和简单模型PID控制经典算法的大部.再接下来的我们将讨论智能PID控制,智能PID控制不同于常规意义下的智能控制,是 ...
- 两轮自平衡小车双闭环PID控制设计
两轮自平衡小车的研究意义 ...
- PID控制算法的C语言实现十 专家PID与模糊PID的C语言实现
本节是PID控制算法的C语言实现系列的最后一节,前面8节中,已经分别从PID的实现到深入的过程进行了一个简要的讲解,从前面的讲解中不难看出,PID的控制思想非常简单,其主要问题点和难点在于比例.积分. ...
- PID控制及整定算法
一.PID控制算法 PID是比例.积分.微分的简称,PID控制的难点不是编程,而是控制器的参数整定.参数整定的关键是正确地理解各参数的物理意义,PID 控制的原理可以用人对炉温的手动控制来理解.阅读本 ...
- 【iCore3应用开发平台】发布 iCore3 应用开发平台PID控制代码
说明:1.本代码包包含FPGA和STM32F407两部分内容2.FPGA工程为出厂代码FPGA工程,版本为REV43.STM32F407为只含PID控制的ARM工程4.在使用风扇过程中,请勿将手伸入扇 ...
- 数字式PID控制的应用总结
PID控制是一个二阶线性闭环控制器,通过调整比例.积分和微分三项参数,使得大多数的工业控制系统获得良好的闭环控制性能.PID控制优点:a. 技术成熟,b. 易被人们熟悉和掌握,c. 不需要建立数学模型 ...
- PID控制学习笔记(二)
不管是基本的PID控制还是变形的PID控制算法,其核心都是对输入信号(设定值信号.测量信号或者偏差信号等)做基本的比例.积分.微分运算,最终提供给被控过程良好的调节信号. 在过程控制仪表,特别是在数字 ...
随机推荐
- 有 a - b < c 对Java安全性的思考
软件工程中,不论使用哪种开发语言,安全性一直是一个非常棘手却又重要的问题.安全性是软件开发领域永远的主题之一,而且随着互联网的蜂拥发展而带动的新技术的兴起与革命(比如近几年火起来的node.js,py ...
- Android 进程回收
1.Android 进程回收策略 众所周知,Android是基于Linux系统的.在Android进程回收策略中,Android进程与Linux进程根据OOM_ADJ阈值进行区分: OOM_ADJ & ...
- Debian 版本历史
Production Releases Version Code name Release date End of life date 8.0 jessie April 25th 2015 7.0 ...
- 从MySQL向Greenplum集群中导入数据
我们要从MySQL当中导出数据到Greenplum当中,按照以下步骤就可以 1:将MySQL当中的表导出外部文件 以schema_name.table_name为例 select product_id ...
- SQL server数据库压缩空间
SQL server数据库,在手动删除或者自动删除数据后,查看数据库物理文件发现占用空间并没有释放,果断采用万能的重启.(反正是自己用的一个服务器,随便玩.如果不是只有自己用的服务器,还是建议让运维或 ...
- Jquery组织Form表单提交之Form submission canceled because the form is not connected
有时候导出Excel时需要根据某些条件筛选数据,然后将数据通过NPOI生成Excel并导出.组织数据时可以通过放到一个表单中,某些场景是使用脚本(如:jquery)组织一个form(通过字符串拼接), ...
- ASP.NET MVC使用AuthenticationAttribute验证登录
首先,添加一个类AuthenticationAttribute,该类继承AuthorizeAttribute,如下: using System.Web; using System.Web.Mvc; n ...
- C++发展概述、优缺点及应用领域
个人观点(C++虽功能强大,但是底层还是调用C,C++为了吸引更多的C程序员,功能过于丰富且复杂,一定程度上反而降低了可编程的实用性.但是不可否认C++ 也是一门艺术.) C++是一门以C为基础发展而 ...
- Azure Document DB 存储过程、触发器、自定义函数的实现
阅读 大约需要 4 分钟 在上一篇随笔中记录的是关于Azure Cosmos DB 中SQL API (DocumentDB) 的简介和Repository 的实现.本随笔是Document DB 中 ...
- [翻译] CBStoreHouseRefreshControl
CBStoreHouseRefreshControl What is it? A fully customizable pull-to-refresh control for iOS inspired ...