poj2991 Crane(线段树)
Description
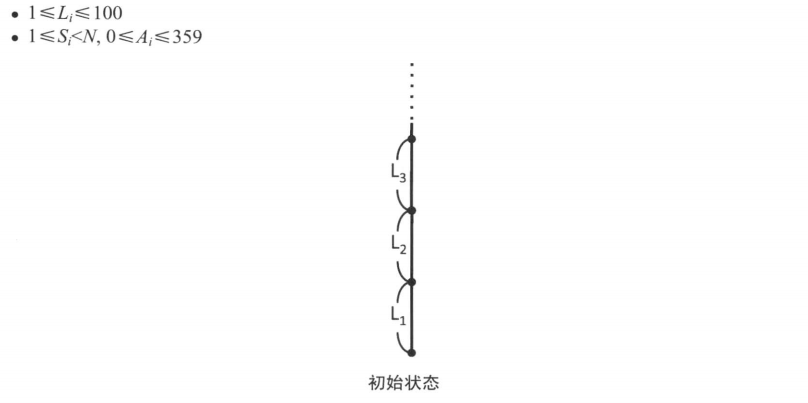
Your task is to write a part of this software that determines the position of the end of the n-th segment after each command. The state of the crane is determined by the angles between consecutive segments. Initially, all of the angles are straight, i.e., 180o. The operator issues commands that change the angle in exactly one joint.
Input
The first line of each instance consists of two integers 1 ≤ n ≤10 000 and c 0 separated by a single space -- the number of segments of the crane and the number of commands. The second line consists of n integers l1,..., ln (1 li 100) separated by single spaces. The length of the i-th segment of the crane is li. The following c lines specify the commands of the operator. Each line describing the command consists of two integers s and a (1 ≤ s < n, 0 ≤ a ≤ 359) separated by a single space -- the order to change the angle between the s-th and the s + 1-th segment to a degrees (the angle is measured counterclockwise from the s-th to the s + 1-th segment).
Output
The outputs for each two consecutive instances must be separated by a single empty line.
Sample Input
2 1
10 5
1 90 3 2
5 5 5
1 270
2 90
Sample Output
5.00 10.00 -10.00 5.00
-5.00 10.00
Source
题解:
我是没想到是线段树,看了是线段树后自己yy了一个建线段树的方法,好像跟书上的不一样。
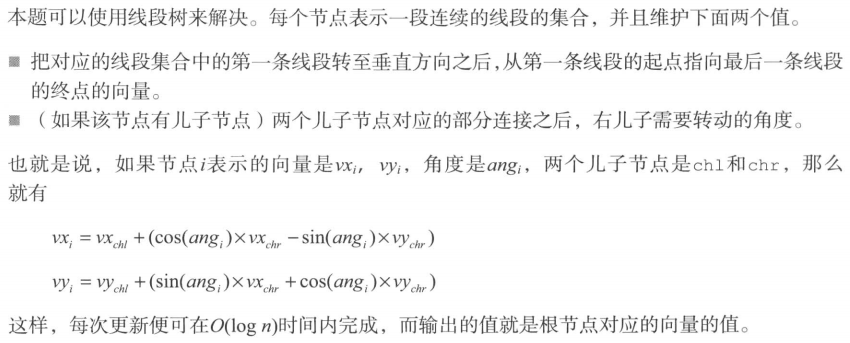
书上的方法:
我的代码:
program rrr(input,output);
const
eps=1e-10;
type
treetype=record
l,r:longint;
x,y,d:double;
end;
var
a:array[..]of treetype;
c:array[..]of double;
b:array[..]of longint;
n,m,i,x:longint;
y,t,xx,yy:double;
procedure build(k,l,r:longint);
var
mid,i:longint;
begin
a[k].l:=l;a[k].r:=r;a[k].x:=;a[k].d:=;
if l=r then begin a[k].y:=b[l];exit; end;
mid:=(l+r)>>;i:=k+k;
build(i,l,mid);build(i+,mid+,r);
a[k].y:=a[i].y+a[i+].y;
end;
procedure pushdown(k:longint);
var
i:longint;
begin
if a[k].l=a[k].r then a[k].d:=;
if abs(a[k].d)<eps then exit;
i:=k+k;
xx:=a[i].x*cos(a[k].d)-a[i].y*sin(a[k].d);
yy:=a[i].x*sin(a[k].d)+a[i].y*cos(a[k].d);
a[i].x:=xx;a[i].y:=yy;a[i].d:=a[i].d+a[k].d;
inc(i);
xx:=a[i].x*cos(a[k].d)-a[i].y*sin(a[k].d);
yy:=a[i].x*sin(a[k].d)+a[i].y*cos(a[k].d);
a[i].x:=xx;a[i].y:=yy;a[i].d:=a[i].d+a[k].d;
a[k].d:=;
end;
procedure change(k:longint);
var
mid,i:longint;
begin
pushdown(k);
if x<a[k].l then
begin
xx:=a[k].x*cos(t)-a[k].y*sin(t);
yy:=a[k].x*sin(t)+a[k].y*cos(t);
a[k].x:=xx;a[k].y:=yy;
a[k].d:=t;
exit;
end;
mid:=(a[k].l+a[k].r)>>;i:=k+k;
if x<mid then change(i);
change(i+);
a[k].x:=a[i].x+a[i+].x;a[k].y:=a[i].y+a[i+].y;
end;
begin
assign(input,'r.in');assign(output,'r.out');reset(input);rewrite(output);
while not eof do
begin
readln(n,m);if (n=) and (m=) then break;
for i:= to n do begin read(b[i]);c[i]:=pi; end;
build(,,n);
for i:= to m do
begin
readln(x,y);t:=y/*pi-c[x];c[x]:=y/*pi;
change();
writeln(a[].x::,' ',a[].y::);
end;
writeln;
end;
close(input);close(output);
end.
poj2991 Crane(线段树)的更多相关文章
- poj2991 Crane(线段树+集合)白书例题
题目大意:起重机有n节,题目给出要调节的k节,每节调节成x度,求最后底部的起重机的坐标(最顶上的起点为(0,0)). 分析:一开始我看白书,看不懂他那个向量旋转的坐标是怎么来的,翻了很多博客,才发现, ...
- POJ 2991 Crane(线段树+计算几何)
POJ 2991 Crane 题目链接 题意:给定一个垂直的挖掘机臂.有n段,如今每次操作能够旋转一个位置,把[s, s + 1]专程a度,每次旋转后要输出第n个位置的坐标 思路:线段树.把每一段当成 ...
- (中等) POJ 2991 Crane , 几何+线段树。
Description ACM has bought a new crane (crane -- jeřáb) . The crane consists of n segments of variou ...
- POJ 2991 Crane(线段树)
Crane Time Limit: 2000MS Memory Limit: 65536K Total Submissions: 7687 Accepted: 2075 Special J ...
- POJ 2991 Crane (线段树)
题目链接 Description ACM has bought a new crane (crane -- jeřáb) . The crane consists of n segments of v ...
- POJ 2991–Crane【线段树+几何】
题意: 把手臂都各自看成一个向量,则机械手的位置正好是手臂向量之和.旋转某个关节,其实就是把关节到机械手之间的手臂向量统统旋转. 由于手臂很多,要每个向量做相同的旋转操作很费时间.这时就可以想到用线段 ...
- Crane /// 向量旋转+线段树
题目大意: 给定n条首尾相接的线段的长度 第一条从0,0开始,所有线段垂直与x轴向上延伸 给定c次操作 每次操作给定 s,a 使得 由第s条线段的角度 逆时针旋转a后 达到第s+1条线段的角度 每次操 ...
- 线段树总结 (转载 里面有扫描线类 还有NotOnlySuccess线段树大神的地址)
转载自:http://blog.csdn.net/shiqi_614/article/details/8228102 之前做了些线段树相关的题目,开学一段时间后,想着把它整理下,完成了大牛NotOnl ...
- [转载]完全版线段树 by notonlysuccess大牛
原文出处:http://www.notonlysuccess.com/ (好像现在这个博客已经挂掉了,在网上找到的全部都是转载) 今天在清北学堂听课,听到了一些很令人吃惊的消息.至于这消息具体是啥,等 ...
随机推荐
- JAVA框架 Mybaits 一对一、一对多
一:阐述 我们在日常操作的时候,很多时候会遇到多表联合查询,由于参照物的不通 ,会出现一对一.一对多的情况.比如说:账号信息和订单表,从订单表角度和账号信息是一对一的情况(一个订单只能是一个用户的情况 ...
- WebView之加载网页时增加进度提示
上一节讲了一些webview的基本使用以及在记载网页时如何屏蔽掉第三方浏览器,使我们自己开发的程序成为一个微型浏览器.那么这一节将一下在webView加载网页的过程中如何加上进度提示.效果图如下: 主 ...
- jupyter notebook的两个使用技巧
1.设置jupyter notebook的密码: Jupyter-notebook password 2.查看jupyter notebook的token: Jupyter notebook list
- excel实用技巧——vlookup函数
1.VLOOKUP函数的套路 VLOOKUP(要找谁,在哪儿找,返回第几列的内容,精确找还是近似找) 最后一个参数: 如果为0或FASLE,用精确匹配方式,而且支持无序查找: 如果为TRUE或被省略, ...
- 20155211 网络对抗 Exp9 Web安全基础实践
20155211 网络对抗 Exp9 Web安全基础实践 基础问题回答 SQL注入攻击原理,如何防御? 原理:SQL注入攻击指的是通过构建特殊的输入作为参数传入Web应用程序,而这些输入大都是SQL语 ...
- 20155217《网络对抗》Exp06 信息搜集与漏洞扫描
20155217<网络对抗>Exp06 信息搜集与漏洞扫描 实践内容 各种搜索技巧的应用 DNS IP注册信息的查询 基本的扫描技术:主机发现.端口扫描.OS及服务版本探测.具体服务的查点 ...
- WPF 初学VisifireChart
visifire今天登陆他们官网的时候,发现好像是挂掉了,不知道是不再运营了,还是单纯服务器出了问题. VisifireChart的效果不炫,但是对于一些项目,感觉够用的,所以,今天大概看了几篇博客, ...
- LoRa---sx1278的FIFO工作流程和应用注意事项
单开一篇,介绍sx1278的FIFO工作流程和应用设置,分析下出的一些小问题,毕竟也困扰了我几天.亦或是我比较愚钝.总之,记下来吧! /******************************** ...
- 【Qt】QLabel之动态阴影边框
效果如下: 实现思路参考了下面的文章: Qt 之 QPropertyAnimation 该文章是自定义属性alpha,原理类似,代码如下: //在头文件加入 Q_PROPERTY(int iBorde ...
- libgdx学习记录23——图片移动选择
模拟移动选择图片,采用相机实现. package com.fxb.newtest; import com.badlogic.gdx.ApplicationAdapter; import com.bad ...