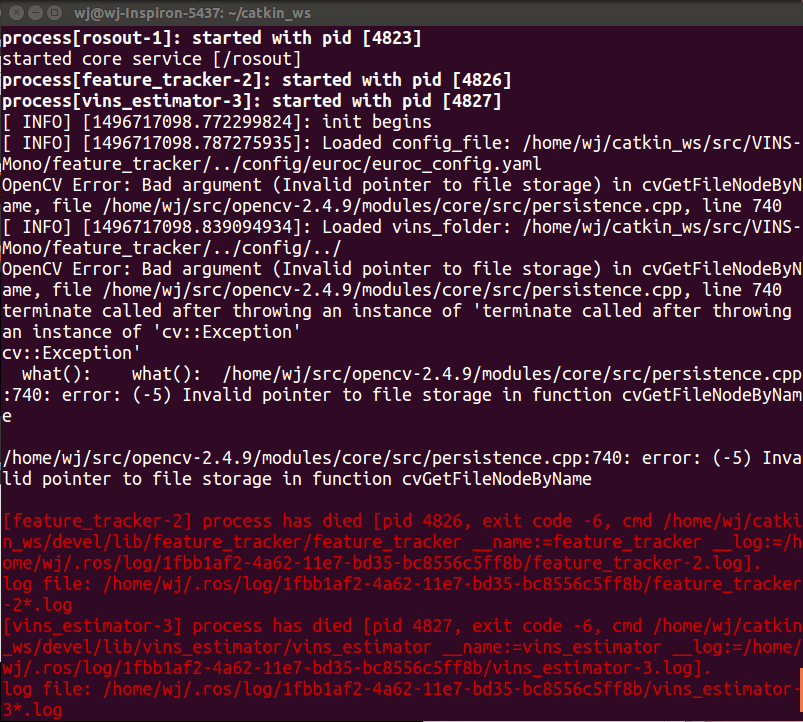
error:cv_bridge---opencv和ros连接起来的桥

有多个warning出现。。。版本冲突
解决办法:
cv_bridge[opencv和ros连接起来的桥],默认依赖的opencv版本是2.4.8,如果安装了新的opencv版本,比如3.1.0,那么在编译cv_bridge时候会提示无法找到opencv 2.4.8.so的库。
1.必须要先把旧版本的cv_bridge卸载掉:
sudo apt-get remove ros-indigo-cv-bridge
2.然后下载新版本的cv_bridge:
git clone https://github.com/ros-perception/vision_opencv.git
3.修改cv_bridge中的cmakelists.txt
find_package(OpenCV 3.1 REQUIRED) //将opencv的版本指定为3.1
4.将里面的cv_bridge包拿出来,放到工作空间中,重新编译:
catkin_make --pkg cv_bridge //catkin_make --pkg[package包],单独编译工作空间catkin_ws中的包;catkin_make编译所有的
也可以通过cmake编译
cd ~/catkin_ws/src/cv_bridge
mkdir build
cd build
cmake ..
make
sudo make install
结束之后你就可以更改你的其他代码了,由于以前的cv_bridge不见了,所以要在其他代码的cmakelists.txt添加一句话,后面的路径是自己的路径,查找cv_bridge.config.cmake所在的路径即可
set(cv_bridge_DIR /usr/local/share/cv_bridge/cmake) //在find_package前面
export LD_LIBRARY_PATH=/usr/local/lib/
error:cv_bridge---opencv和ros连接起来的桥的更多相关文章
- ROS连接ABB机械臂调试详细教程-ROS(indigo)和ABB RobotStudio 6.03.02-
在ROS industrial介绍中,给出了ROS和常用机械臂的连接方式.具体信息可以参考:http://wiki.ros.org/Industrial ROS连接ABB机械臂调试详细教程-ROS(i ...
- sh make.sh fatal error: opencv2/opencv.hpp: No such file or directory
问题: sh make.sh fatal error: opencv2/opencv.hpp: No such file or directory 解决: sudo apt-get install l ...
- strange error encountered today in ROS
I reinstalled my ubuntu system and also ROS. I tested slam_karto package when some strange error cam ...
- ROS和OpenCV的对接cv_bridge
做一个诚实的ROS教程搬运工............................. 官网链接:http://wiki.ros.org/cv_bridge 一.Package Summary Rel ...
- 关于ros将opencv版本固定“写死”的一些想法
今天主要工作是将ros和zed结合起来,但是发现自己安装了opencv3.1,ros indigo安装的是opencv2.4.8,这就麻烦了,zed支持的是opencv3.1.一开始使用slam2时, ...
- ROS编译工作区缺少cv_bridge的问题解决
cv_bridge是OpenCV与ROS之间的格式转换桥梁,编译工作区时遇到报错(目标不存在),直接将cv_bridge包复制到指定的目录即可. 下载地址:https://github.com/ros ...
- ROS Learning-016 Arduino-For-ROS-001 搭建 Arduino 和 ROS 之间相连接的开发环境
Arduino For ROS-001 - 搭建 ROS 和 Arduino 相连接的开发环境 我的Ubuntu系统:Ubuntu 14.04.10 TLS 32位 Arduino的版本:Arduin ...
- OpenCV For iOS 1: 连接OpenCV 3.0
本文的内容參考Instant OpenCV for iOS结合最新的开发平台完毕. 本系列文章採用的的开发环境为: 1)Xcode 6 2)OpenCV for iOS 3.0.0 alpha 接下来 ...
- ROS使用FLIR品牌的相机
本文介绍如何将FLIR品牌的相机应用于ROS系统,将相机实时的数据以rostopic实时广播: 系统平台:Ubuntu16.04 LTS ROS Kinetic 依赖:OpenCV(本例中所用版本 ...
随机推荐
- U3D中可以直接使用GL!!!
https://blog.csdn.net/u013172864/article/details/78860624
- Java IO中转换流的作用
在<Java网络编程>中,有这样一段话: ”Reader和Writer最重要的子类是InputStreamReader和OutputStreamWriter类. InputStreamRe ...
- unzip解压带密码的压缩包
// 解压 String pw = "123456"; String cmd = "unzip -P " + pw + " /root/lianlia ...
- 转:display:flex不兼容Android、Safari低版本的解决方案 【flex布局】
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- ArcGIS中的WKID(转)
ArcGIS中的WKID link: https://www.cnblogs.com/liweis/p/5951032.html 提到坐标系统,大家多少能明白一些,但在运用时,有些朋友搞得不是非常清楚 ...
- SQL调用C# dll(第二中DLL,强名称密匙)
参考:微软官网 https://msdn.microsoft.com/zh-cn/library/ms345106(es-es).aspx 1.新建项目 SQLDllTestUsingNew Clas ...
- Unity3D脚本学习——运行时类
AssetBundle 类,继承自Object.AssetBundles让你通过WWW类流式加载额外的资源并在运行时实例化它们.AssetBundles通过BuildPipeline.BuildAss ...
- PowerDesigner 修改table背景色
Tools->Display Preferences(显示参数选择)->Format->Table->Modify->Fill->Fill color 出处:htt ...
- mysql 删掉重复数据
--不知道为啥这个mysql外边还要包一层,不然就报错DELETE FROM course WHERE name IN ( select mm.name from ( SELECT a.name as ...
- php正则替换双引号里面的字符