Luogu P1220 关路灯 题解 [ 蓝 ][ 区间dp ]
关路灯
题目描述
某一村庄在一条路线上安装了 \(n\) 盏路灯,每盏灯的功率有大有小(即同一段时间内消耗的电量有多有少)。老张就住在这条路中间某一路灯旁,他有一项工作就是每天早上天亮时一盏一盏地关掉这些路灯。
为了给村里节省电费,老张记录下了每盏路灯的位置和功率,他每次关灯时也都是尽快地去关,但是老张不知道怎样去关灯才能够最节省电。他每天都是在天亮时首先关掉自己所处位置的路灯,然后可以向左也可以向右去关灯。开始他以为先算一下左边路灯的总功率再算一下右边路灯的总功率,然后选择先关掉功率大的一边,再回过头来关掉另一边的路灯,而事实并非如此,因为在关的过程中适当地调头有可能会更省一些。
现在已知老张走的速度为 \(1m/s\),每个路灯的位置(是一个整数,即距路线起点的距离,单位:\(m\))、功率(\(W\)),老张关灯所用的时间很短而可以忽略不计。
请你为老张编一程序来安排关灯的顺序,使从老张开始关灯时刻算起所有灯消耗电最少(灯关掉后便不再消耗电了)。
输入格式
第一行是两个数字 \(n\)(表示路灯的总数)和 \(c\)(老张所处位置的路灯号);
接下来 \(n\) 行,每行两个数据,表示第 \(1\) 盏到第 \(n\) 盏路灯的位置和功率。数据保证路灯位置单调递增。
输出格式
一个数据,即最少的功耗(单位:\(J\),\(1J=1W\times s\))。
样例 #1
样例输入 #1
5 3
2 10
3 20
5 20
6 30
8 10
样例输出 #1
270
提示
样例解释
此时关灯顺序为
3 4 2 1 5。
数据范围
\(1\le n\le50\),\(1\le c\le n\),\(1\le W_i \le 100\)。
题解
分析
本题是一道经典的区间dp,时间复杂度为 \(O(n^2)\) 。
首先可以发现,老张走的路线上经过的所有灯都会被关闭,因为关灯不会花费任何时间。
同时,老张走过的路线也可以抽象成下面的图。
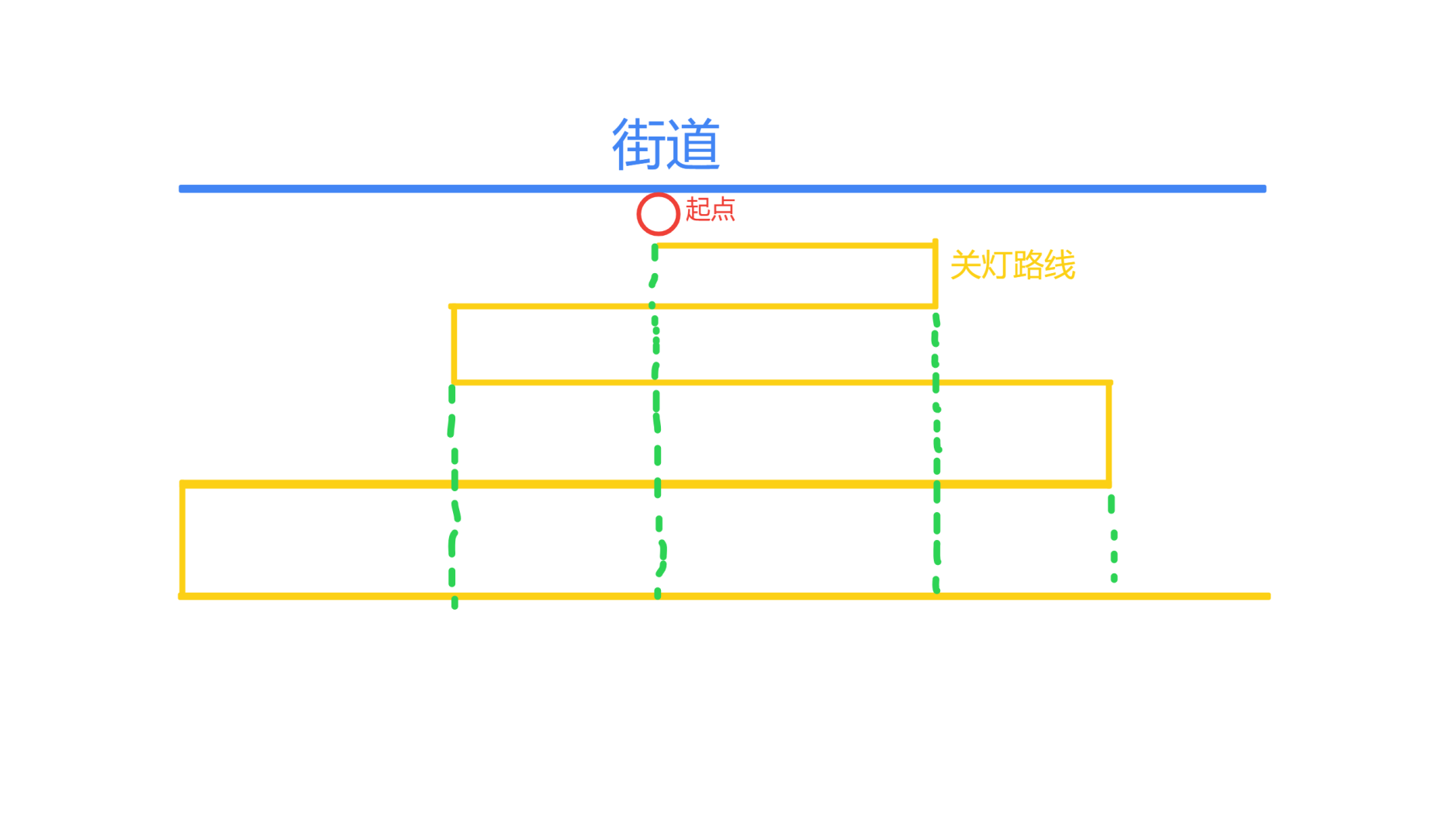
观察可知,每行路线后的下一行路线都比这一行路线要长。
因此,我们可以把街道看成一个区间,\(f_{i,j}\) 表示从横坐标为 \(i\) 的点走到横坐标为 \(j\) 的点耗费的最少电量。
同时由于路线上的所有灯都会被关闭,所以 \(f_{i,j}\) 也表示关闭从横坐标为 \(i\) 的灯到横坐标为 \(j\) 的灯所用的最少电量 。
但是对于一个 \([ i , j ]\) 的区间,老张既可能站在 \(i\) 上,也可能站在 \(j\) 上。
所以还要再加一维 \(f_{i,j,k}\) , 当 \(k=0\) 时表示老张站在 \(i\) 上,当 \(k=1\) 时表示老张站在 \(j\) 上。
并且,对于横坐标为 \(x\) 的一个点而言,它的这一步既可以是从上一步顺着走过来的,也可以是在上一步之后突然转弯走过来的。
因此,在计算 \(f_{i,j,k}\) 的时候,应该进行分类讨论。
\(f_{i,j,k} = \begin{cases}
k=0 \begin{cases}
\text{ 来自 } i+1 \\
\\
\text{ 来自 } j \\
\end{cases}
\\
\\
k=1 \begin{cases}
\text{ 来自 } j-1 \\
\\
\text{ 来自 } i \\
\end{cases}
\end{cases}\)
\(i+1\) 是 \(i\) 的右边,由于 \(i\) 为区间的左端点,代表 \(i\) 为从左往右数第一个熄灭的灯,所以 \(i\) 的左边不可能有当前被关掉的灯,只有右边 \(i+1\) 有被熄灭的灯,所以从 \(i+1\) 走来 ;而 \(j\) 代表到了右端点 \(j\),突然不往右边走了,折返回 \(i\) 。
\(j-1\) 是 \(j\) 的左边,由于 \(j\) 为区间的右端点,代表 \(j\) 为从右往左数第一个熄灭的灯,所以 \(j\) 的右边不可能有当前被关掉的灯,只有左边 \(j-1\) 有被熄灭的灯,所以从 \(j-1\) 走来 ;而 \(i\) 代表到了左端点 \(i\),突然不往左边走了,折返回 \(j\) 。
实现
不难发现,至此问题已经和 合并石子 问题非常相似了。
我们可以把路灯看成一个个石子,然后从老张的起始位置开始合并区间,直到把 \([1,n]\) 的区间全部合并完成。
如上文所言,\(f_{i,j,k}\) 表示在 \([i,j]\) 的电灯全部关闭后,老张站在 \(k\) 时的最少已经消耗的电量。
因此,可以写出动态转移方程式:
\(f_{i,j,0} = min \begin{cases}
f_{i+1,j,0} &+ &cal( ) \\
f_{i+1,j,1} &+ &cal( ) \\
\end{cases}\)
\(f_{i,j,1} = min \begin{cases}
f_{i,j-1,0} &+ &cal( ) \\
f_{i,j-1,1} &+ &cal( ) \\
\end{cases}\)
这里的 \(cal()\) 指计算走到目标点花费的电量。
同时,也应当注意状态转移的顺序,要保证每一个区间要用到的子区间全部都求完了。
我们可以设 \(f_{s,s,0}=f_{s,s,1}=0\) ,其它的设为无穷大,这里的 \(s\) 指老张起始坐标。
然后先枚举区间的长度,再从左到右枚举左端点位置,根据长度来推出右端点位置,依次更新 \(f_{i,j,k}\) ,时间 \(O(n^2)\) 。
由于只有其子区间先前被更新过的区间才会被更新,所以状态传递就是从点 \(c\) 扩散到两侧。
每个区间要用到的是比自己短 \(1\) 的子区间,如 \([i+1,j]\) 和 \([i,j-1]\) ,在更新 \([i,j]\) 前长度比他们短的子区间全都更新过了。
这是区间dp问题的通常转移顺序。
细节
上文中,有一个 \(cal()\) 函数我们并未实现,因此我们要来实现它。
我们可以为路灯的位置与电灯的功率定义两个前缀和数组,分别为 \(p[N]\) 与 \(w[N]\) 。(因为题目保证路灯位置一定递增,所以不用给位置排序。)
其中,$p_i=p_{i-1}+p_i , w_i=w_{i-1}+w_i $ 。但因为题目中已经给你了距离的前缀和,所以不用处理 \(p\) 。
对于一个已经全部关掉的灯的区间 \([l,r]\),当前站在的地方 \(s\) ,要去到的地方 \(e\) ,我们定义函数 \(cal(l,r,s,e)\)。
其中,起点终点距离为 \(p_{max(s,e)} - p_{min(s,e)}\) ,这里的前缀和求值下标不用 \(-1\) 是因为每个点存的是与一个不存在路灯的 \(0\) 的距离。
由于老张速度为 \(1m/s\) ,所以耗费的时间就是 \(p_{max(s,e)} - p_{min(s,e)}\) 。
同时,所有没关的电灯的功率综合为 \(w_n-w_r+w_{l-1}\) ,\(r\) 不用 \(-1\) 是因为它已经被关了,要被减去功率,而 \(l\) 要 \(-1\) 也是因为它没被关,所以不能加入功率中。
所以,\(cal(l,r,s,e) = (p_{max(s,e)} - p_{min(s,e)})*(w_n-w_r+w_{l-1})\) 。
代码
#include <bits/stdc++.h>
using namespace std;
int p[105],w[105],f[105][105][3],n,c;
int cal(int l,int r,int s,int e)//算出一段的代价
{
return (p[max(s,e)]-p[min(s,e)])*(w[n]-w[r]+w[l-1]);
}
int main()
{
memset(f,0x3f,sizeof(f));//初始化代价
cin>>n>>c;
for(int i=1;i<=n;i++)
{
cin>>p[i]>>w[i];
w[i]+=w[i-1];//只有功率要前缀和,这题的位置题目已经做好前缀和了
}
f[c][c][0]=f[c][c][1]=0;//把c设为0,不然无法更新其他点
for(int l=2;l<=n;l++)//枚举每个区间长度
{
for(int np=1;np+l-1<=n;np++)//枚举每个区间的起点
{
//由于只有其子区间先前被更新过的区间才会被更新,所以状态传递就是从点c扩散到两侧
//每个区间要用到的是比自己短1的子区间,如[i+1,j]和[i,j-1],在更新[i,j]前长度比他们短的子区间全都更新过了
int i=np,j=np+l-1;//i左端点,j右端点
f[i][j][0]=min(f[i+1][j][0]+cal(i+1,j,i+1,i),f[i+1][j][1]+cal(i+1,j,j,i));
f[i][j][1]=min(f[i][j-1][0]+cal(i,j-1,i,j),f[i][j-1][1]+cal(i,j-1,j-1,j));
}
}
cout<<min(f[1][n][0],f[1][n][1]);//输出结尾为左右端点中较小代价的那一个
return 0;
}
Luogu P1220 关路灯 题解 [ 蓝 ][ 区间dp ]的更多相关文章
- 洛谷 P1220 关路灯 (贪心+区间dp)
这一道题我一直在想时间该怎么算. 看题解发现有个隐藏的贪心. 路径一定是左右扩展的,左右端点最多加+1(我竟然没发现!!) 这个性质非常重要!! 因此这道题用区间dp f[i][j]表示关完i到j的路 ...
- 洛谷 P1220 关路灯 题解
Description 有 $n$ 盏路灯,每盏路灯有坐标(单位 $m$)和功率(单位 $J$).从第 $c$ 盏路灯开始,可以向左或向右关闭路灯.速度是 $1m/s$.求所有路灯的最少耗电.输入保证 ...
- 洛谷P1220 关路灯 题解 区间DP
题目链接:https://www.luogu.com.cn/problem/P1220 本题涉及算法:区间DP. 我们一开始要做一些初始化操作,令: \(p[i]\) 表示第i个路灯的位置: \(w[ ...
- 洛谷P1220关路灯题解
题目 此题是一个状态转移方程还算比较多的一个区间DP,这个题也能启示我们如果某个状态不能够很好地解决问题,那么不妨试试再加一维,而且如果转移顺序不确定的话,可以试试记忆化搜索,说不定就可以比较容易的写 ...
- luogu P1220 关路灯
题目描述 某一村庄在一条路线上安装了n盏路灯,每盏灯的功率有大有小(即同一段时间内消耗的电量有多有少).老张就住在这条路中间某一路灯旁,他有一项工作就是每天早上天亮时一盏一盏地关掉这些路灯. 为了给村 ...
- P1220 关路灯——区间dp
P1220 关路灯 题目描述 某一村庄在一条路线上安装了 \(n\) 盏路灯,每盏灯的功率有大有小(即同一段时间内消耗的电量有多有少).老张就住在这条路中间某一路灯旁,他有一项工作就是每天早上天亮时一 ...
- Luogu 1220 关路灯(动态规划)
Luogu 1220 关路灯(动态规划) Description 某一村庄在一条路线上安装了n盏路灯,每盏灯的功率有大有小(即同一段时间内消耗的电量有多有少).老张就住在这条路中间某一路灯旁,他有一项 ...
- 洛谷——P1220 关路灯
P1220 关路灯 题目描述 某一村庄在一条路线上安装了n盏路灯,每盏灯的功率有大有小(即同一段时间内消耗的电量有多有少).老张就住在这条路中间某一路灯旁,他有一项工作就是每天早上天亮时一盏一盏地关掉 ...
- 洛谷P1220 关路灯【区间dp】
题目:https://www.luogu.org/problemnew/show/P1220 题意:给定n盏灯的位置和功率,初始时站在第c盏处. 关灯不需要时间,走的速度是1单位/秒.问把所有的灯关掉 ...
- P1220 关路灯 区间dp
题目描述 某一村庄在一条路线上安装了n盏路灯,每盏灯的功率有大有小(即同一段时间内消耗的电量有多有少).老张就住在这条路中间某一路灯旁,他有一项工作就是每天早上天亮时一盏一盏地关掉这些路灯. 为了给村 ...
随机推荐
- OSG开发笔记(三十六):osg3.4.0基于windows平台msvc2017x64编译器编译并移植Demo
前言 本篇编译osg3.4.0的msvc2017x64版本,之前使用的都是mingw32版本. OSG编译 步骤一:下载解压 下载3.4.0版本. 步骤二:使用cmake配置 ...
- Javascript 异步处理
1.传统异步处理 ES6之前使用回调进行处理,示例代码: //创建一个异步返回 双倍数值 的函数 function asyncDouble(num,cb){ // 创建标识,表示该异步处理是否完成 v ...
- 使用 httputils + protostuff 实现高性能 rpc
1.先讲讲 protostuf protostuf 一直是高性能序列化的代表之一.但是用起来,可难受了,你得先申明 protostuf 配置文件,并且要把这个配置文件转成类.所以必然要学习新语法.新工 ...
- 渗透测试-Kioptix Level 1靶机getshell及提权教程
声明! 学习视频来自B站up主 泷羽sec 有兴趣的师傅可以关注一下,如涉及侵权马上删除文章,笔记只是方便各位师傅的学习和探讨,文章所提到的网站以及内容,只做学习交流,其他均与本人以及泷羽sec团队无 ...
- uniapp使用EventBus实现页面间数据传递
前情 最近在做小程序项目,选用是当前比较火的uniapp技术栈,经常会遇到页面间消息传递的需求. 为什么要这么做? uniapp页面间数据通信方式有很多:通过url传参,状态管理库vuex/pinia ...
- 前端每日一知之BFC
脑图在线链接 本文内容依据[js每日一题]公众号精彩文章总结而来
- 使用docker部署自己的网页版chatgpt
如果你有了一个Chat GPT账号想分享给多个人使用,最好还不用禾斗学上网别人就能访问,那么chatgpt-web这个项目可能刚好满足你的需求. 少点命令行,多点可视化,这里采用更直观的方式来搭建ch ...
- 如何解决Git合并冲突?
讲个故事先: 一个晴朗的日子,Alex 把远程版本库的修改拉到他的本地版本库. 他修改了名为 abc.txt 的文件,将其暂存(staged),提交(committed),最后推送(pushed)回远 ...
- openEuler创建和root一样的账号
1. 使用以下命令在 openEuler 操作系统的 root 用户下创建管理员用户: useradd -m -G root admin -m 表示创建用户的同时创建用户的主目录, -G 表示将用户添 ...
- FineReport其他js记录
1.js修改日期组件 背景色 边框 setTimeout(function () { var color = "#092347"; var fontColor = "wh ...