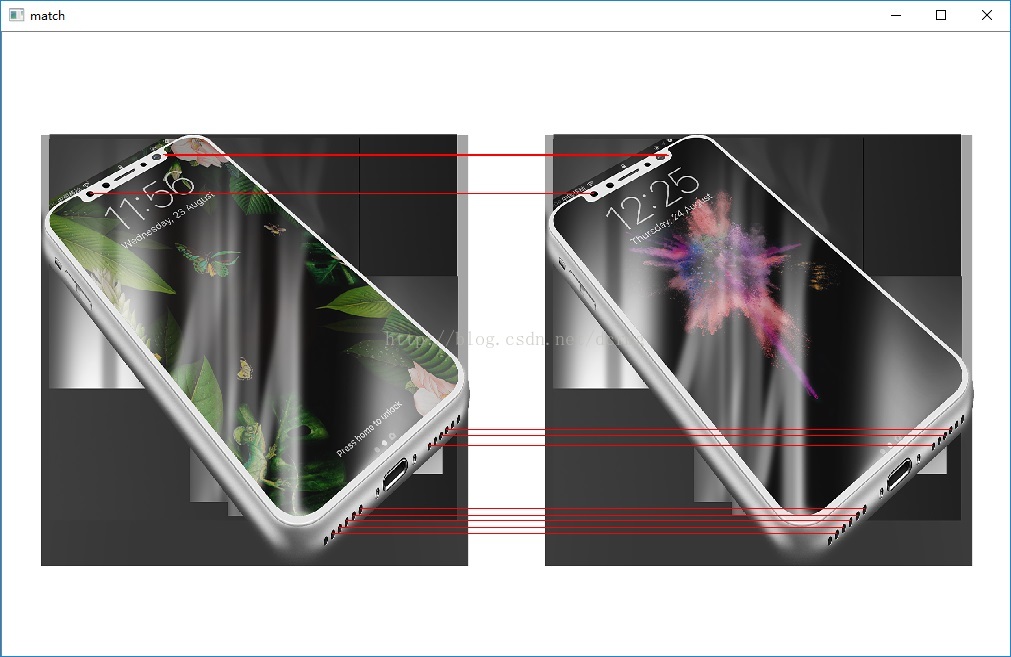
OpenCV-Python sift/surf特征匹配与显示
import cv2
import numpy as np
def drawMatchesKnn_cv2(img1_gray,kp1,img2_gray,kp2,goodMatch):
h1, w1 = img1_gray.shape[:2]
h2, w2 = img2_gray.shape[:2]
vis = np.zeros((max(h1, h2), w1 + w2, 3), np.uint8)
vis[:h1, :w1] = img1_gray
vis[:h2, w1:w1 + w2] = img2_gray
p1 = [kpp.queryIdx for kpp in goodMatch]
p2 = [kpp.trainIdx for kpp in goodMatch]
post1 = np.int32([kp1[pp].pt for pp in p1])
post2 = np.int32([kp2[pp].pt for pp in p2]) + (w1, 0)
for (x1, y1), (x2, y2) in zip(post1, post2):
cv2.line(vis, (x1, y1), (x2, y2), (0,0,255))
cv2.namedWindow("match",cv2.WINDOW_NORMAL)
cv2.imshow("match", vis)
img1_gray = cv2.imread("D:\\05.jpg")
img2_gray = cv2.imread("D:\\06.jpg")
sift = cv2.SIFT()
#sift = cv2.SURF()
kp1, des1 = sift.detectAndCompute(img1_gray, None)
kp2, des2 = sift.detectAndCompute(img2_gray, None)
# BFmatcher with default parms
bf = cv2.BFMatcher(cv2.NORM_L2)
matches = bf.knnMatch(des1, des2, k = 2)
goodMatch = []
for m,n in matches:
if m.distance < 0.50*n.distance:
goodMatch.append(m)
drawMatchesKnn_cv2(img1_gray,kp1,img2_gray,kp2,goodMatch[:20])
cv2.waitKey(0)
cv2.destroyAllWindows()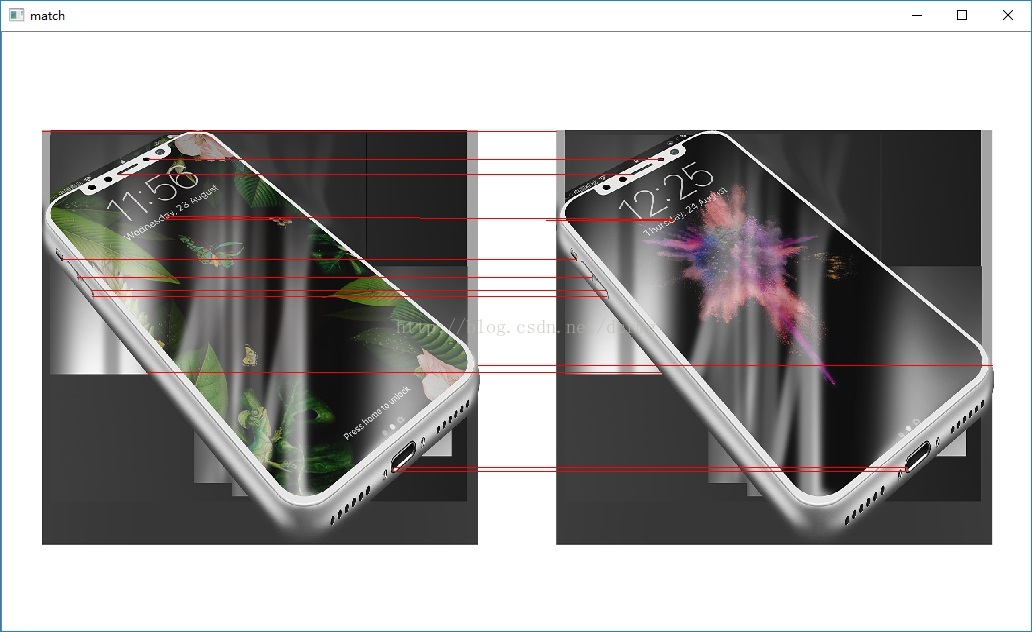
说明:
- 1. Sift特征和Surf特征提取特征的方法略有差异,在整个匹配流程上一样
- 2. knnMatch(des1, des2,k
= 2) 函数执行特征点匹配, k = 2 定义基准图像上的一个点会在另一幅图像上有2个匹配结果。
- 3. 不论Sift还是Surf都是强制匹配,不能保证匹配的点就是准确的,只能保证相对正确。
- 4. goodMatch是经过筛选的优质配对,如果2个配对中第一匹配的距离小于第二匹配的距离的0.5,基本可以说明这个第一配对是两幅图像中独特的,不重复的特征点。当然并不能保证goodMatch保留的就是最优匹配。
- 5. OpenCV3中有drawMatchesKnn()函数,可以直接拼接显示配对点,OpenCV2中没有这个函数,定义的drawMatchesKnn_cv2()实现了配对显示部分功能。
OpenCV-Python sift/surf特征匹配与显示的更多相关文章
- 【OpenCV新手教程之十八】OpenCV仿射变换 & SURF特征点描写叙述合辑
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/33320997 作者:毛星云(浅墨) ...
- Opencv中使用Surf特征实现图像配准及对透视变换矩阵H的平移修正
图像配准需要将一张测试图片按照第二张基准图片的尺寸.角度等形态信息进行透视(仿射)变换匹配,本例通过Surf特征的定位和匹配实现图像配准. 配准流程: 1. 提取两幅图像的Surf特征 2. 对Sur ...
- 利用SIFT进行特征匹配
SIFT算法是一种基于尺度空间的算法.利用SIFT提取出的特征点对旋转.尺度变化.亮度变化具有不变性,对视角变化.仿射变换.噪声也有一定的稳定性. SIFT实现特征的匹配主要包括四个步骤: 提取特征点 ...
- SURF 特征匹配
参考:http://www.cnblogs.com/ronny/p/4045979.html,博主对源码进行了分析,不过很多没看明白. 分为几个部分.积分图:借助积分图像,图像与高斯二阶微分模板的滤波 ...
- OpenCV 之 特征匹配
OpenCV 中有两种特征匹配方法:暴力匹配 (Brute force matching) 和 最近邻匹配 (Nearest Neighbors matching) 它们都继承自 Descriptor ...
- 【OpenCV新手教程之十七】OpenCV重映射 & SURF特征点检測合辑
本系列文章由@浅墨_毛星云 出品.转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/30974513 作者:毛星云(浅墨) ...
- opencv学习之路(35)、SURF特征点提取与匹配(三)
一.简介 二.opencv中的SURF算法接口 三.特征点匹配方法 四.代码 1.特征点提取 #include "opencv2/opencv.hpp" #include < ...
- opencv surf特征点匹配拼接源码
http://blog.csdn.net/huixingshao/article/details/42672073 /** * @file SURF_Homography * @brief SURF ...
- 基于OpenCV全景拼接(Python)SIFT/SURF
一.实验内容: 利用sift算法,实现全景拼接算法,将给定的两幅图片拼接为一幅. 二.实验环境: 主机配置: CPU :intel core i5-7300 2.50GHZ RAM :8.0GB 运行 ...
随机推荐
- unity一些知识
有一个问题就是在Inspector面板修改 WheelNumber的数值后,运行项目,当项目停止的时候,WheelNumber 的数据又回到以前的数据,(数据未保存成功,数据丢失) 解决办法需要在 修 ...
- 【BZOJ3698】XWW的难题 有上下界的最大流
[BZOJ3698]XWW的难题 Description XWW是个影响力很大的人,他有很多的追随者.这些追随者都想要加入XWW教成为XWW的教徒.但是这并不容易,需要通过XWW的考核.XWW给你出了 ...
- Map集合按value的大小排序
public static void main(String[] args) { Map<String, Integer> map = new HashMap<String, Int ...
- POJ 1584 A Round Peg in a Ground Hole【计算几何=_=你值得一虐】
链接: http://poj.org/problem?id=1584 http://acm.hust.edu.cn/vjudge/contest/view.action?cid=22013#probl ...
- phpstorm+xdebug, 实现断点调试: xdebug如何配置
[XDebug] xdebug.profiler_output_dir="D:\phpStudy\tmp\xdebug" xdebug.trace_output_dir=" ...
- PAT 1054. 求平均值 (20)
本题的基本要求非常简单:给定N个实数,计算它们的平均值.但复杂的是有些输入数据可能是非法的.一个“合法”的输入是[-1000,1000]区间内的实数,并且最多精确到小数点后2位.当你计算平均值的时候, ...
- 将本地jar包手动复制到Maven库中,在其它电脑上用Maven打包时出错
版权声明:本文为博主原创文章,未经博主同意不得转载. https://blog.csdn.net/UP19910522/article/details/31396107 背景交代:在做图片水印时候引入 ...
- 【oracle案例】ORA-01722
1.1. ORA-01722 日期:2014-06-05 14:09 环境:測试环境 [情景描写叙述] 在数据库的升级过程中,运行SQL> @?/rdbms/admin/catupgrd ...
- angularjs 中的iframe 标签 ng-src 路径 z-index 必须有position
如果直接写路径到iframe标签里的ng-src中会出现报错: 解决方法: 1.ng里面有个属性是专门用来解决跨域问题的 $sce. 用法: $scope.someUrl = $sce.trustAs ...
- ubuntu导入torch模块报错
ubuntu下导入torch报错 >>> import torchIllegal instruction (core dumped) 安装pytorch 去pytorch官网下载py ...