STM32CubeMX HAL库串口+DMA数据发送不定长度数据接收
参考资料:1、ST HAL库官网资料
2、https://blog.csdn.net/u014470361/article/details/79206352#comments
一、STM32CubeMX配置外部时钟
注意在进行外部时钟配置时,即“High Speed Clock”和“Low Speed Clock”需配置成“Crytal/Ceramic Resonator(低温/陶瓷谐振器)”不能配置为"BYASS Clock Source(时钟脉冲源)",否则系统起不来。

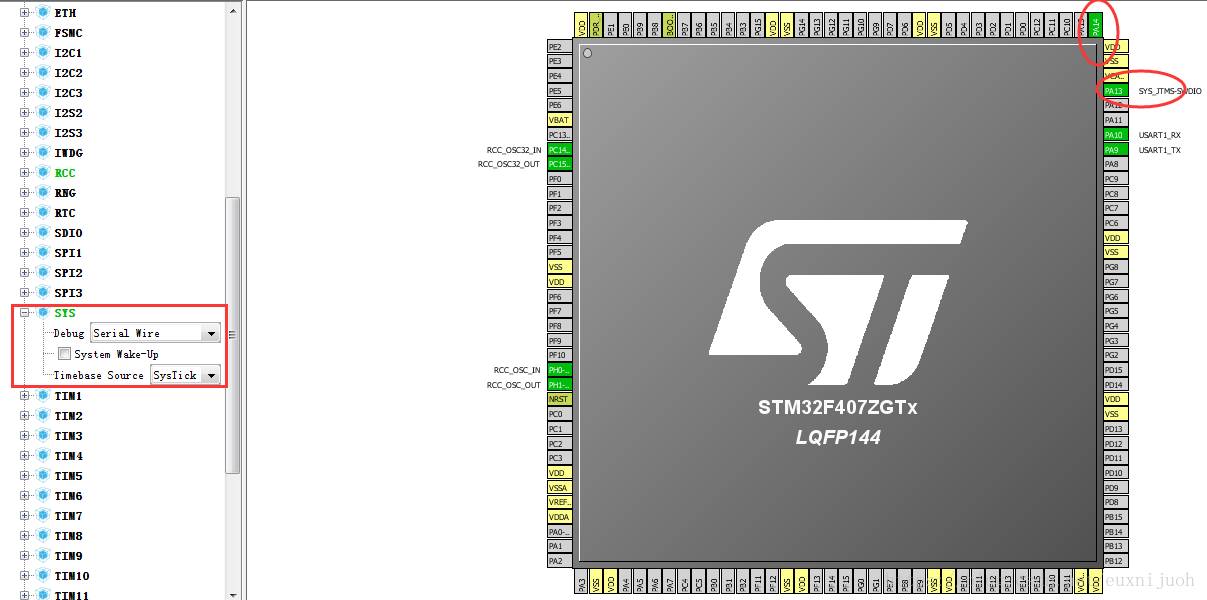
二、SWD下载接口配置
如果用HAL库不进行SWD或JTAG配置,单片机只能进行下载一次程序,要进行第二次或更多次程序下载,需要按复位键(如果你的单片机有复位按键的话),或者用镊子夹住复位线路上的电容使其短路,点击Keil下载,再松开镊子。
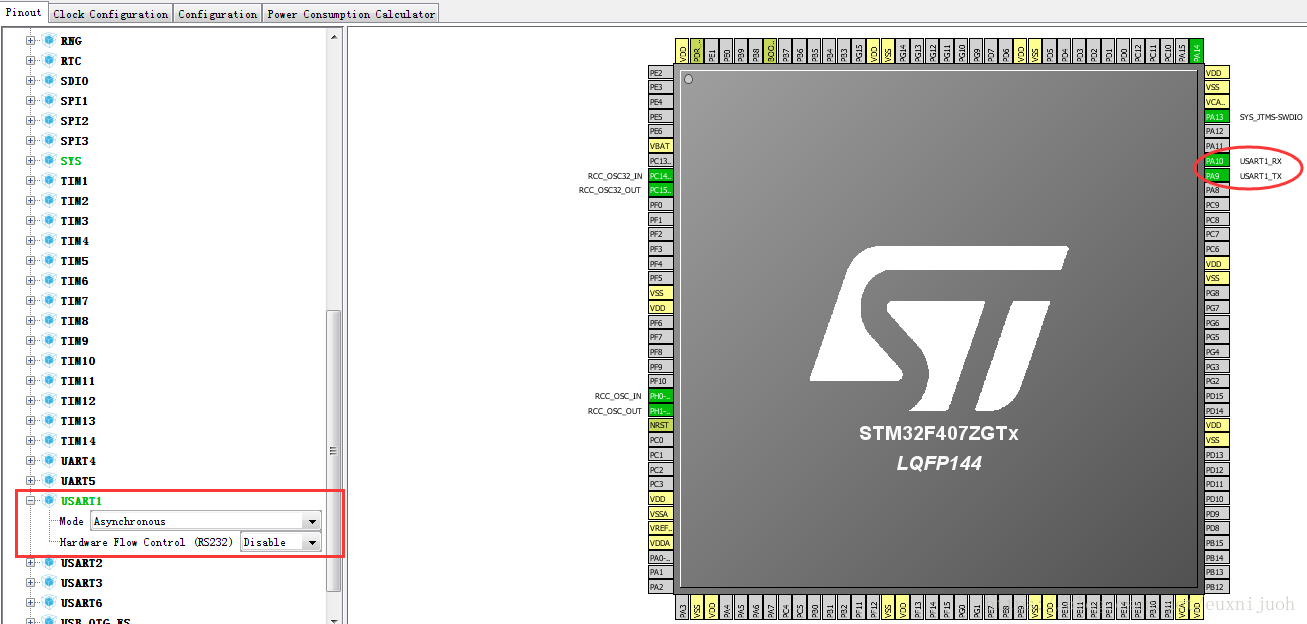
三、串口1(USART1)配置
四、时钟树配置(外部低速晶振32.768kHz,外部高速晶振8MHz)

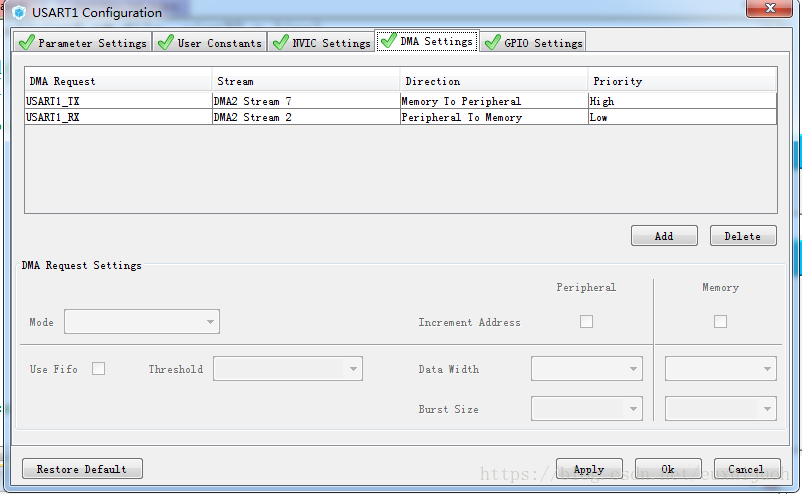
五、串口DMA配置

六、软件配置
#define BUFFER_SIZE 100
/* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart1;
DMA_HandleTypeDef hdma_usart1_tx;
DMA_HandleTypeDef hdma_usart1_rx;
DMA_HandleTypeDef hdma;
uint8_t rx_len = 0; //接收一帧数据的长度
uint8_t recv_end_flag = 0; //一帧数据接收完成标志
uint8_t rx_buffer[100]={0}; //接收数据缓存
/*
*********************************************************************************************************
* 函 数 名: MX_GPIO_Init
* 功能说明: /GPIO时钟初始化函数
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void MX_GPIO_Init(void) //GPIO时钟初始化
{
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
}
/*
*********************************************************************************************************
* 函 数 名: MX_DMA_Init
* 功能说明: 串口DMA时钟初始化函数
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA2_CLK_ENABLE();
/* DMA interrupt init */
/* DMA2_Stream2_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA2_Stream2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA2_Stream2_IRQn);
/* DMA2_Stream7_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA2_Stream7_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA2_Stream7_IRQn);
}
/*
*********************************************************************************************************
* 函 数 名: MX_USART1_UART_Init
* 功能说明: 串口功能初始化函数
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void MX_USART1_UART_Init(void) //串口初始化
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200; //波特率
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
__HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE); //使能IDLE中断
HAL_UART_Receive_DMA(&huart1,rx_buffer,BUFFER_SIZE);//使能接收中断
}
/*
*********************************************************************************************************
* 函 数 名: HAL_UART_MspInit
* 功能说明: 串口DMA功能初始化函数
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void HAL_UART_MspInit(UART_HandleTypeDef* huart)
{
GPIO_InitTypeDef GPIO_InitStruct;
if(huart->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 DMA Init */
/* USART1_TX Init */
hdma_usart1_tx.Instance = DMA2_Stream7;
hdma_usart1_tx.Init.Channel = DMA_CHANNEL_4;
hdma_usart1_tx.Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma_usart1_tx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_usart1_tx.Init.MemInc = DMA_MINC_ENABLE;
hdma_usart1_tx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_usart1_tx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_usart1_tx.Init.Mode = DMA_NORMAL;
hdma_usart1_tx.Init.Priority = DMA_PRIORITY_HIGH;
hdma_usart1_tx.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_usart1_tx) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
__HAL_LINKDMA(huart,hdmatx,hdma_usart1_tx);
/* USART1_RX Init */
hdma_usart1_rx.Instance = DMA2_Stream2;
hdma_usart1_rx.Init.Channel = DMA_CHANNEL_4;
hdma_usart1_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_usart1_rx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_usart1_rx.Init.MemInc = DMA_MINC_ENABLE;
hdma_usart1_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_usart1_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_usart1_rx.Init.Mode = DMA_NORMAL;
hdma_usart1_rx.Init.Priority = DMA_PRIORITY_LOW;
hdma_usart1_rx.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_usart1_rx) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
__HAL_LINKDMA(huart,hdmarx,hdma_usart1_rx);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
}
/*
*********************************************************************************************************
* 函 数 名: DMA_Usart_Send
* 功能说明: 串口发送功能函数
* 形 参: buf,len
* 返 回 值: 无
*********************************************************************************************************
*/
void DMA_Usart_Send(uint8_t *buf,uint8_t len)//串口发送封装
{
if(HAL_UART_Transmit_DMA(&huart1, buf,len)!= HAL_OK)
{
Error_Handler();
}
/*##-3- Wait for the end of the transfer ###################################*/
while (UartReady != SET){}
/* Reset transmission flag */
UartReady = RESET;
}
/*
*********************************************************************************************************
* 函 数 名: DMA_Usart1_Read
* 功能说明: 串口接收功能函数
* 形 参: Data,len
* 返 回 值: 无
*********************************************************************************************************
*/
void DMA_Usart1_Read(uint8_t *Data,uint8_t len)//串口接收封装
{
HAL_UART_Receive_DMA(&huart1,Data,len);//重新打开DMA接收
}
/*
*********************************************************************************************************
* 函 数 名:main
* 功能说明: main主函数
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
while (1)
{
if(recv_end_flag == 1) //接收完成标志
{
DMA_Usart_Send(rx_buffer, rx_len);
rx_len = 0;//清除计数
recv_end_flag = 0;//清除接收结束标志位
memset(rx_buffer,0,sizeof(rx_buffer));
}
}
}
/*
*********************************************************************************************************
* 函 数 名:DMA2_Stream2_IRQHandler
* 功能说明: 串口DMA接收中断函数
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void DMA2_Stream2_IRQHandler(void)
{
HAL_DMA_IRQHandler(&hdma_usart1_rx);
}
/*
*********************************************************************************************************
* 函 数 名:DMA2_Stream7_IRQHandler
* 功能说明: 串口DMA发送中断函数
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void DMA2_Stream7_IRQHandler(void)
{
HAL_DMA_IRQHandler(&hdma_usart1_tx);
}
/*
*********************************************************************************************************
* 函 数 名:USART1_IRQHandler
* 功能说明: 串口中断函数
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void USART1_IRQHandler(void) //串口中断
{
uint32_t tmp_flag = 0;
uint32_t temp;
HAL_UART_IRQHandler(&huart1);
if(USART1 == huart1.Instance){
tmp_flag =__HAL_UART_GET_FLAG(&huart1,UART_FLAG_IDLE); //获取IDLE标志位
if((tmp_flag != RESET))//idle标志被置位
{
recv_end_flag = 1; // 接受完成标志位置1
__HAL_UART_CLEAR_IDLEFLAG(&huart1);//清除标志位
HAL_UART_DMAStop(&huart1); //
temp = UartHandle.Instance->SR; //清除状态寄存器SR,读取SR寄存器可以实现清除SR寄存器的功能
temp = UartHandle.Instance->DR; //读取数据寄存器中的数据
temp = __HAL_DMA_GET_COUNTER(&hdma_usart1_rx);// 获取DMA中未传输的数据个数
rx_len = BUFFER_SIZE - temp; //总计数减去未传输的数据个数,得到已经接收的数据个数
HAL_UART_Receive_DMA(&huart1,rx_buffer,BUFFER_SIZE);//重新打开DMA接收
}
}
七、串口调试助手打印

下面链接可下载具体的源码:
https://download.csdn.net/download/euxnijuoh/10606293,写的不好,请见谅!
STM32CubeMX HAL库串口+DMA数据发送不定长度数据接收的更多相关文章
- STM32CubeMX HAL库串口: 使用DMA数据发送、使用DMA不定长度数据接收
转载自 https://blog.csdn.net/euxnijuoh/article/details/81638676
- stm32 hal库串口通信资料汇集
串口的发送接收函数:HAL_UART_Transmit();串口轮询模式发送,使用超时管理机制.HAL_UART_Receive();串口轮询模式发送,使用超时管理机制.HAL_UART_Transm ...
- STM32 HAL库利用DMA实现串口不定长度接收方法
参考:https://blog.csdn.net/u014470361/article/details/79206352 我这里使用的芯片是 F1 系列的,主要是利用 DMA 数据传输方式实现的,在配 ...
- STM32基于HAL库通过DMA读写SDIO
通过STM32CUBEMX生成DMA读写sdio的工程,再读写过程中总会卡死在DMA中断等待读写完成的while中,最终发现while等待的标志在SDIO的中断里置位的,而SDIO中断优先级如果小于或 ...
- ASP.NET中将数据作为XML数据发送 使用 Request.InputStream 接收
将数据作为XML数据发送,例如:public void PostXml(string url, string xml){byte[] bytes = Encoding.UTF8.GetBytes(xm ...
- springMVC中对HTTP请求form data和request payload两种数据发送块的后台接收方式
最近在做项目中发现,前台提交数据时,如果通过form表单提交和ajax发送json时,springMVC后台接收不能都通过@ModelAttribute方式处理,经过一番查找后,ajax发送json请 ...
- STM32 HAL 库实现乒乓缓存加空闲中断的串口 DMA 收发机制,轻松跑上 2M 波特率
前言 直接储存器访问(Direct Memory Access,DMA),允许一些设备独立地访问数据,而不需要经过 CPU 介入处理.因此在访问大量数据时,使用 DMA 可以节约可观的 CPU 处理时 ...
- STM32之串口DMA接收不定长数据
STM32之串口DMA接收不定长数据 引言 在使用stm32或者其他单片机的时候,会经常使用到串口通讯,那么如何有效地接收数据呢?假如这段数据是不定长的有如何高效接收呢? 同学A:数据来了就会进入串口 ...
- 串口配合DMA接收不定长数据(空闲中断+DMA接收)-(转载)
1.空闲中断和别的接收完成(一个字节)中断,发送完成(发送寄存器控)中断的一样是串口中断: 2.空闲中断是接收到一个数据以后,接收停顿超过一字节时间 认为桢收完,总线空闲中断是在检测到在接收数据后, ...
随机推荐
- 吴裕雄 python 机器学习——分类决策树模型
import numpy as np import matplotlib.pyplot as plt from sklearn import datasets from sklearn.model_s ...
- 2016word多级列表 一级标题居中后偏左
一.如下图所示,定义好多级列表之后设置标题,但是发现标题居中后偏左. 二.选择多级列表,设置居左对齐
- MySql中SQL语句与其他数据库不一样的地方
目前发现的mysql与其他数据库如SqlServer.Oracle不同的地方 mysql中的注释(--)后要多加一个空格才生效 mysql中查询条件的字符串可以是双引号 mysql中查询条件的字符串不 ...
- 对于在git上面拉代码报"error: RPC failed; curl 56 OpenSSL SSL_read: SSL_ERROR_SYSCALL, errno 10054"解决方法
主要原因是安全设置的问题: 首先执行git config http.sslVerify "false" 若出现下列错误 git config http.sslVerify &q ...
- openstack swift curl 常用操作
上传文件 curl -v -X PUT -H 'X-Auth-Token: AUTH_tkd9276f23b3404c67b8a6be45da881d6e' http://127.0.0.1:8080 ...
- 【转】使用python实现appium的屏幕滑动
前些日子写一个滑动手机页面的小脚本,看到大家给的内容都是swipe方法,这里对swipe方法做一个小介绍: Swipe(int start x,int start y,int end x,int y, ...
- Loadrunner 11.00录制App脚本篇(Win10)
参考博文1:https://www.cnblogs.com/mxqh2016/p/6016866.html 参考博文2:https://blog.csdn.net/myohmy2008/article ...
- 关于有时候JQuery使用.val()赋值失败问题
jQuery中有3个获取元素value值的函数比较相似:attr(), prop(), val(): 具体作用网上比较多就不展示对比过程了,结果就是:prop()和val()都能获取到文本框的实际va ...
- docker-compose使用
1.创建app.py项目文件,执行以下代码 import time import redis from flask import Flask app = Flask(__name__) cache = ...
- git GUI设置长期记住密码
git config --global credential.helper store