[python] RRT快速拓展随机树
"""
version1.1,2018-05-09
《基于智能优化与RRT算法的无人机任务规划方法研究》博士论文
《基于改进人工势场法的路径规划算法研究》硕士论文 """ import matplotlib.pyplot as plt
import random
import math
import copy show_animation = True class Node(object):
"""
RRT Node
""" def __init__(self, x, y):
self.x = x
self.y = y
self.parent = None class RRT(object):
"""
Class for RRT Planning
""" def __init__(self, start, goal, obstacle_list, rand_area):
"""
Setting Parameter start:Start Position [x,y]
goal:Goal Position [x,y]
obstacleList:obstacle Positions [[x,y,size],...]
randArea:random sampling Area [min,max] """
self.start = Node(start[0], start[1])
self.end = Node(goal[0], goal[1])
self.min_rand = rand_area[0]
self.max_rand = rand_area[1]
self.expandDis = 1.0
self.goalSampleRate = 0.05 # 选择终点的概率是0.05
self.maxIter = 500
self.obstacleList = obstacle_list
self.nodeList = [self.start] def random_node(self):
"""
产生随机节点
:return:
"""
node_x = random.uniform(self.min_rand, self.max_rand)
node_y = random.uniform(self.min_rand, self.max_rand)
node = [node_x, node_y] return node @staticmethod
def get_nearest_list_index(node_list, rnd):
"""
:param node_list:
:param rnd:
:return:
"""
d_list = [(node.x - rnd[0]) ** 2 + (node.y - rnd[1]) ** 2 for node in node_list]
min_index = d_list.index(min(d_list))
return min_index @staticmethod
def collision_check(new_node, obstacle_list):
a = 1
for (ox, oy, size) in obstacle_list:
dx = ox - new_node.x
dy = oy - new_node.y
d = math.sqrt(dx * dx + dy * dy)
if d <= size:
a = 0 # collision return a # safe def planning(self):
"""
Path planning animation: flag for animation on or off
""" while True:
# Random Sampling
if random.random() > self.goalSampleRate:
rnd = self.random_node()
else:
rnd = [self.end.x, self.end.y] # Find nearest node
min_index = self.get_nearest_list_index(self.nodeList, rnd)
# print(min_index) # expand tree
nearest_node = self.nodeList[min_index] # 返回弧度制
theta = math.atan2(rnd[1] - nearest_node.y, rnd[0] - nearest_node.x) new_node = copy.deepcopy(nearest_node)
new_node.x += self.expandDis * math.cos(theta)
new_node.y += self.expandDis * math.sin(theta)
new_node.parent = min_index if not self.collision_check(new_node, self.obstacleList):
continue self.nodeList.append(new_node) # check goal
dx = new_node.x - self.end.x
dy = new_node.y - self.end.y
d = math.sqrt(dx * dx + dy * dy)
if d <= self.expandDis:
print("Goal!!")
break if True:
self.draw_graph(rnd) path = [[self.end.x, self.end.y]]
last_index = len(self.nodeList) - 1
while self.nodeList[last_index].parent is not None:
node = self.nodeList[last_index]
path.append([node.x, node.y])
last_index = node.parent
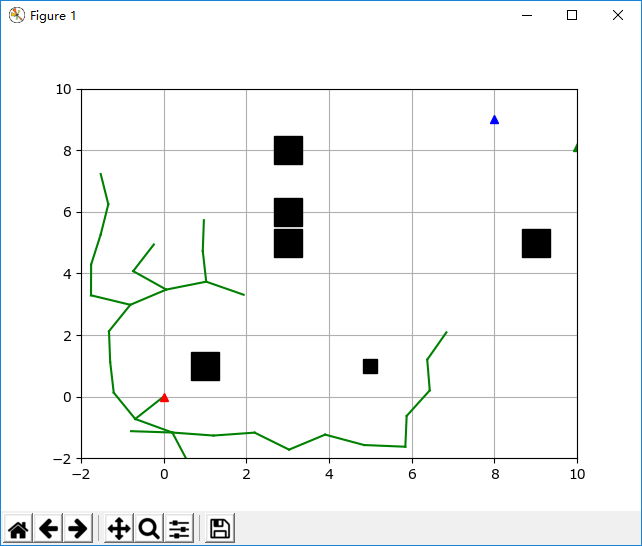
path.append([self.start.x, self.start.y]) return path def draw_graph(self, rnd=None):
"""
Draw Graph
"""
print('aaa')
plt.clf() # 清除上次画的图
if rnd is not None:
plt.plot(rnd[0], rnd[1], "^g")
for node in self.nodeList:
if node.parent is not None:
plt.plot([node.x, self.nodeList[node.parent].x], [
node.y, self.nodeList[node.parent].y], "-g") for (ox, oy, size) in self.obstacleList:
plt.plot(ox, oy, "sk", ms=10*size) plt.plot(self.start.x, self.start.y, "^r")
plt.plot(self.end.x, self.end.y, "^b")
plt.axis([self.min_rand, self.max_rand, self.min_rand, self.max_rand])
plt.grid(True)
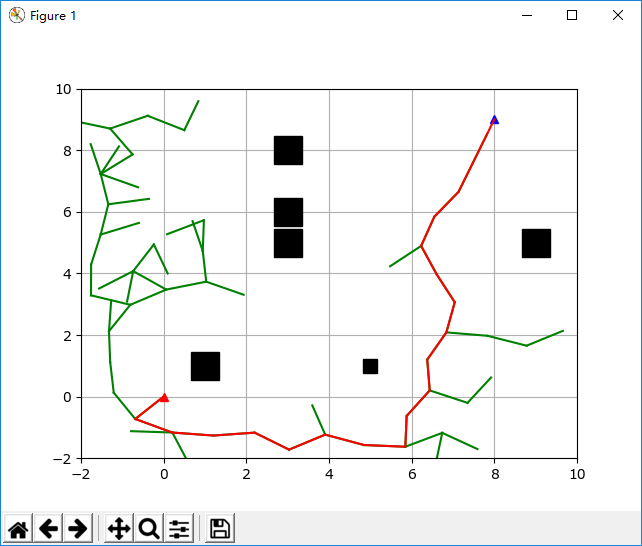
plt.pause(0.01) def draw_static(self, path):
"""
画出静态图像
:return:
"""
plt.clf() # 清除上次画的图 for node in self.nodeList:
if node.parent is not None:
plt.plot([node.x, self.nodeList[node.parent].x], [
node.y, self.nodeList[node.parent].y], "-g") for (ox, oy, size) in self.obstacleList:
plt.plot(ox, oy, "sk", ms=10*size) plt.plot(self.start.x, self.start.y, "^r")
plt.plot(self.end.x, self.end.y, "^b")
plt.axis([self.min_rand, self.max_rand, self.min_rand, self.max_rand]) plt.plot([data[0] for data in path], [data[1] for data in path], '-r')
plt.grid(True)
plt.show() def main():
print("start RRT path planning") obstacle_list = [
(5, 1, 1),
(3, 6, 2),
(3, 8, 2),
(1, 1, 2),
(3, 5, 2),
(9, 5, 2)] # Set Initial parameters
rrt = RRT(start=[0, 0], goal=[8, 9], rand_area=[-2, 10], obstacle_list=obstacle_list)
path = rrt.planning()
print(path) # Draw final path
if show_animation:
plt.close()
rrt.draw_static(path) if __name__ == '__main__':
main()
RRT快速拓展随机树 python实现
[python] RRT快速拓展随机树的更多相关文章
- matlab练习程序(快速搜索随机树RRT)
RRT快速搜索随机树英文全称Rapid-exploration Random Tree,和PRM类似,也是一种路径规划算法. 和PRM类似,算法也需要随机撒点,不过不同的是,该算法不是全局随机撒点,而 ...
- [matlab] 7.快速搜索随机树(RRT---Rapidly-exploring Random Trees) 路径规划
RRT是一种多维空间中有效率的规划方法.它以一个初始点作为根节点,通过随机采样增加叶子节点的方式,生成一个随机扩展树,当随机树中的叶子节点包含了目标点或进入了目标区域,便可以在随机树中找到一条由从初始 ...
- LSH︱python实现局部敏感随机投影森林——LSHForest/sklearn(一)
关于局部敏感哈希算法.之前用R语言实现过,可是由于在R中效能太低.于是放弃用LSH来做类似性检索.学了python发现非常多模块都能实现,并且通过随机投影森林让查询数据更快.觉得能够试试大规模应用在数 ...
- (数据科学学习手札114)Python+Dash快速web应用开发——上传下载篇
本文示例代码已上传至我的Github仓库https://github.com/CNFeffery/DataScienceStudyNotes 1 简介 这是我的系列教程Python+Dash快速web ...
- P3830 [SHOI2012]随机树 题解
P3830 随机树 坑题,别人的题解我看了一个下午没一个看得懂的,我还是太弱了. 题目链接 P3830 [SHOI2012]随机树 题目描述 输入输出格式 输入格式: 输入仅有一行,包含两个正整数 q ...
- (数据科学学习手札102)Python+Dash快速web应用开发——基础概念篇
本文示例代码与数据已上传至我的Github仓库https://github.com/CNFeffery/DataScienceStudyNotes 1 简介 这是我的新系列教程Python+Dash快 ...
- (数据科学学习手札103)Python+Dash快速web应用开发——页面布局篇
本文示例代码已上传至我的Github仓库https://github.com/CNFeffery/DataScienceStudyNotes 1 简介 这是我的系列教程Python+Dash快速web ...
- (数据科学学习手札104)Python+Dash快速web应用开发——回调交互篇(上)
本文示例代码已上传至我的Github仓库https://github.com/CNFeffery/DataScienceStudyNotes 1 简介 这是我的系列教程Python+Dash快速web ...
- (数据科学学习手札109)Python+Dash快速web应用开发——静态部件篇(中)
本文示例代码已上传至我的Github仓库https://github.com/CNFeffery/DataScienceStudyNotes 1 简介 这是我的系列教程Python+Dash快速web ...
随机推荐
- C#设计模式之九组合模式(Composite Pattern)【结构型】
一.引言 今天我们要讲[结构型]设计模式的第四个模式,该模式是[组合模式],英文名称是:Composite Pattern.当我们谈到这个模式的时候,有一个物件和这个模式很像,也符合这个模式要表达的意 ...
- Hibernate概念初探
概述 Hibernate是一个开源代码的对象关系映射(ORM)框架,是基于Java的持久化中间件,它对JDBC进行轻量级的对象封装. 它不仅提供了从Java类到数据表之间的映射,也提供了查询和事务机制 ...
- Android Studio Git 分支使用实践
新公司有些项目是用的 Git,以前公司都是 svn,为了练手 Git,我个人 APP 用到了,但是仅简单的 git pull/push 的使用,并未用到 Git 精髓,只有当项目中用到,才会紧迫去全面 ...
- MFC Bresesnham算法
Bresesnham算法绘制直线段 Bresenham算法的意义:高效的将图形光栅化.其计算过程中均采用加法运算,故大大减少了程序的开销. 绘制直线段(MFC中) //传入参数:起点.终点,颜色 vo ...
- RecyclerView 高度不能随着Item数量 自适应高度
在最近项目中遇到 ,在RecyclerView加载list数据时,高度无法自适应增长,看了很多博客,各种尝试,都没有解决这个问题,在某个博客中,讲到此解决方法,在此记录下. 即在RecyclerVie ...
- (后端)SpringBoot中Mybatis打印sql(转)
原文地址:https://www.cnblogs.com/expiator/p/8664977.html 如果使用的是application.properties文件,加入如下配置: logging. ...
- 使用Fraps获取3D程序的FPS
Fraps为免费软件(wiki),通过Hook OpenGL(SwapBuffer)或D3D(Present)来获取目标进程的FPS信息(32位进程注入fraps32.dll,64位注入fraps64 ...
- SQL中常用数学函数
--1 RAND() 返回0到1的随机值,若不指定随机种子,返回值不同;若指定的种子相同则随机值相同SELECT RAND()SELECT RAND()SELECT RAND(100)SELECT R ...
- Java读取.properties配置文件
一.介绍 Properties文件在Java中主要为配置文件,文件类型为:.properties,格式为文本文件,内容格式为"键=值" 二.读取 这里我采用的是getResourc ...
- CentOS 6.5 搭建 .NET 环境, Mono 5.16.0 + Jexus 5.8
最近有这样一个打算,就是准备把以前的有一个.NET 网站部署在Linux 下面,正好试试 .NET 跨平台的功能,为后续研究 .netCore 方向准备. 搭建环境: CentOS 6.5 + Mon ...