使用unity3d和tensorflow实现基于姿态估计的体感游戏
使用unity3d和tensorflow实现基于姿态估计的体感游戏
前言
之前做姿态识别,梦想着以后可以自己做出一款体感游戏,然而后来才发现too young。但是梦想还是要有的,万一实现了呢。趁着paper发出去的这几天,做一个toy demo。研究了一下如何将姿态估计的结果应用于unity,参考了很多资料,最终决定使用UDP协议,让unity脚本接收python脚本的数据(关节点坐标),来达到控制object的目的,由于刚接触unity时间不长(c#也是刚接触的),所以肯定有很多不足,欢迎交流。demo的代码和模型地址https://github.com/bBobxx/MyPoseWithUnity3d
python脚本
Recognition.py,需要安装tensorflow和opencv-python
python脚本这边就是普通的姿态估计的tensorflow程序,只不过要调用socket包,用来发送数据。这边我设定的是
UDP_IP = "127.0.0.1"
UDP_PORT = 5065
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
端口可以更改,只要确定没占用就行。
后面的dataProcess函数是将图片处理成我的网络的输入,这边的姿态估计算法是我论文中的网络,识别率不是很高,但是凑活,相比于那些识别率很高的,速度也快点,在笔记本的cpu上能达到3FPS左右,勉强能用,我这边的模型使用的是cpu,gpu能不能用没测试过,当然这里完全可以换成别的姿态识别模型,最重要的地方是
string_send = 'st,'
for w in range(nr_joint):
string_send += str(x_c[w])+','+str(y_c[w])+','
string_send += 'end'
sock.sendto( string_send.encode(), (UDP_IP, UDP_PORT) )
一定要将数字转换成字符串,并且encode(),当然这里加不加开头和结尾没那么重要,但是加上可以在unity那边判断一下。
c sharp脚本
playerControllerScript.cs, move.cs前者放在Sphere上,后者放在Cube上。
在unity那边首先要建立关节点代表的sphere,我这边是这样设置的,注意sphere的层次关系和名字一定要跟我一样:
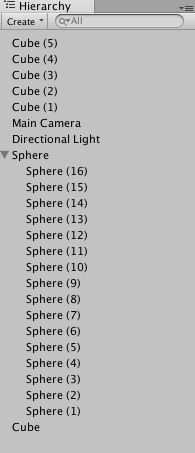
cube是为了玩加上去的,可以不用这些。看一下c#这边的接受函数
private void ReceiveData()
{
client = new UdpClient (port);
while (true)
{
try
{
IPEndPoint anyIP = new IPEndPoint(IPAddress.Parse("0.0.0.0"), port);
byte[] data = client.Receive(ref anyIP);
string text = Encoding.UTF8.GetString(data); //这边记得在解码,port是之前python脚本的端口
string[] strArray = text.Split(',');
int[] coord1 = new int[32];
for (int i = 1; i<strArray.Length-1;++i) {
int x = Int32.Parse(strArray[i]);
coord1[i-1] = x;
}
if (updateCoord) {
coord = coord1;
updateCoord = false;
}
} catch(Exception e)
{
print (e.ToString());
}
}
}
这部分的代码主要参考的这篇博客https://www.raywenderlich.com/5475-introduction-to-using-opencv-with-unity
然后将姿态估计的结果应用到每个小球上就可以了,这里我的demo中将小球和方块添加了刚体和碰撞属性,这部分如果不清楚就去查资料吧,我也是刚入门,就不误导了。这是update函数中干的事情:
void Update ()
{
if (!updateCoord){
for (int i=0; i<16;i++) {
string obj = "Sphere (" + Convert.ToString(i+1)+")";
GameObject spherei = sphere.transform.Find(obj).gameObject;
if (coord[2*i] >0 && coord[2*i+1]>0) {
int x = coord[2*i]-320;
int y = coord[2*i+1]-240;
spherei.transform.position = new Vector3(x, y, 0.0f);
}
else
spherei.transform.position = new Vector3(-1000.0f, -1000.0f, 0.0f);
updateCoord = true;
}
}
}
我的笔记本的相机拍出的图片大小是640*480的,所以上面将x,y坐标减了一半,这里可能需要改,或者直接不减也可以。这里的z坐标是0,是因为这是2d姿态估计,3d的以后如果有结果再实现。
效果图
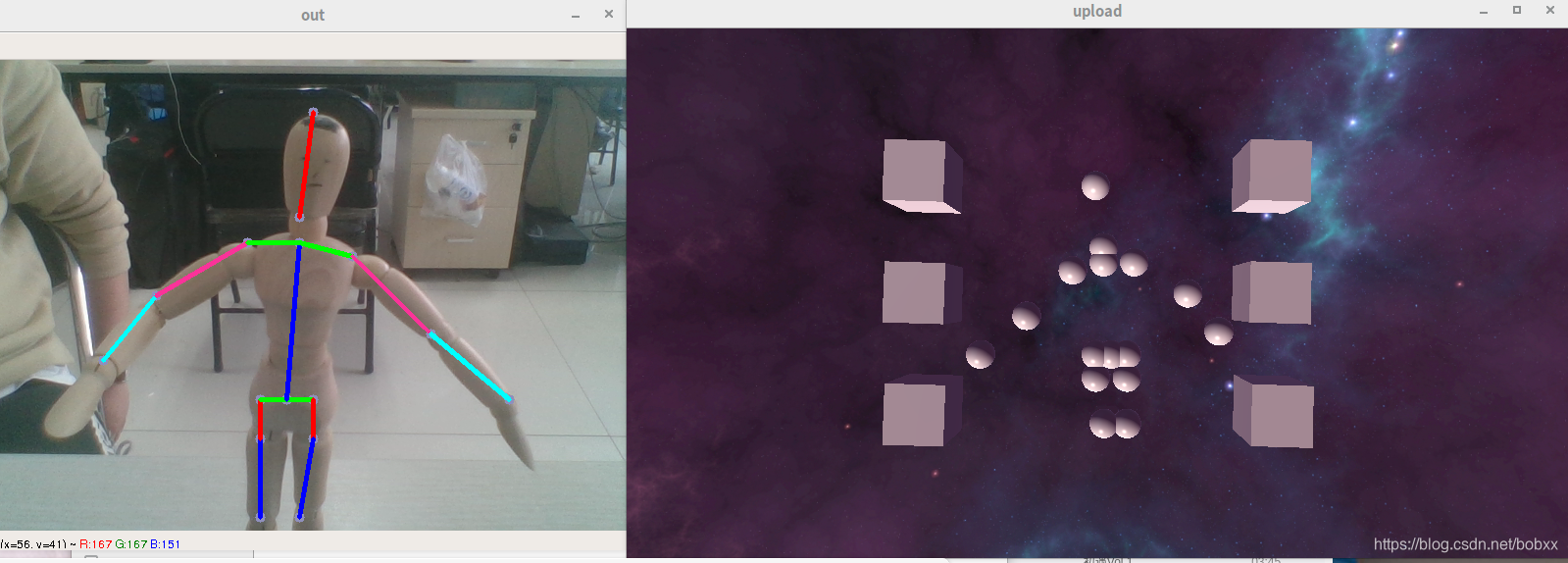
小球太大的结果QAQ,所以有重叠,真人的话就好点了。编译了一个64位linux的执行文件,链接:[https://pan.baidu.com/s/19P5ebRN7dUXNcN2n7EQLXQ] (https://pan.baidu.com/s/19P5ebRN7dUXNcN2n7EQLXQ) 提取码: ju73。
使用unity3d和tensorflow实现基于姿态估计的体感游戏的更多相关文章
- 【CityHunter】基于LBS的AR体感游戏设计理念
本人目前还不是游戏行业的圈内人士,并不懂得,游戏行业的生态圈,也不懂得,所谓的什么“中国市场环境”.所以不敢发表关于这方面的见解,不过我在这里想要插一句话,就是我认为啊,行业内,人与人之间还是有分层次 ...
- OpenNI结合Unity3D Kinect进行体感游戏开发(转)
OpenNI结合Unity3D Kinect进行体感游戏开发(转) 楼主# 更多 发布于:2012-07-17 16:42 1. 下载安装Unity3D(目前版本为3.4)2. 下载OpenN ...
- 历时一周,unity3d+xtion打造我的第一个休闲体感小游戏《空降奇兵》
1.游戏介绍 本游戏属于休闲小游戏,主要操作如下: 菜单控制:举起左手或右手,点击左边或者右边的菜单:挥动左手或右手,选择关卡: 操作方式:玩家跳跃,游戏中的伞兵从飞机开始降落:玩家通过控制伞兵的左右 ...
- Tensorflow之基于MNIST手写识别的入门介绍
Tensorflow是当下AI热潮下,最为受欢迎的开源框架.无论是从Github上的fork数量还是star数量,还是从支持的语音,开发资料,社区活跃度等多方面,他当之为superstar. 在前面介 ...
- Facebook提出DensePose数据集和网络架构:可实现实时的人体姿态估计
https://baijiahao.baidu.com/s?id=1591987712899539583 选自arXiv 作者:Rza Alp Güler, Natalia Neverova, Ias ...
- PCL学习(五)如何在mesh模型上sample更多点及三维物体姿态估计
---恢复内容开始--- 最近在做关于物体姿态估计的项目 基本思路就是 我们在估计物体的pose的时候,需要用分割得到的点云与模型库中的模型做匹配 1.通过基于RANSANC的SAC-IA将点云和模型 ...
- CVPR2020文章汇总 | 点云处理、三维重建、姿态估计、SLAM、3D数据集等(12篇)
作者:Tom Hardy Date:2020-04-15 来源:CVPR2020文章汇总 | 点云处理.三维重建.姿态估计.SLAM.3D数据集等(12篇) 1.PVN3D: A Deep Point ...
- CVPR 2020几篇论文内容点评:目标检测跟踪,人脸表情识别,姿态估计,实例分割等
CVPR 2020几篇论文内容点评:目标检测跟踪,人脸表情识别,姿态估计,实例分割等 CVPR 2020中选论文放榜后,最新开源项目合集也来了. 本届CPVR共接收6656篇论文,中选1470篇,&q ...
- 快速人体姿态估计:CVPR2019论文阅读
快速人体姿态估计:CVPR2019论文阅读 Fast Human Pose Estimation 论文链接: http://openaccess.thecvf.com/content_CVPR_201 ...
随机推荐
- 从外部导入django模块
import os import sys sys.path.append("D:\\pyweb\\sf"); # 项目位置(不是app) os.environ.setdefault ...
- 怎样在 fedora 28 上 打开 .jnlp 文件
最近使用 iDrac 和 iLO 总是会使用到 .jnlp 文件, 为了方便,今天把设置过程记录下来. JNLP 文件,全名为 Java Network Launching Protocol 文件, ...
- soapui 调用wsdl 步骤以及出现的问题
创建soap project 添加wsdl 地址(或者导入wsdl(后缀可以是xml或者wsdl)文件) 添加request 自动生成请求代码 参数放在in0 中 <soapenv:Envelo ...
- ZooKeeper 管理脚本
0. 说明 编写 xzk.sh 脚本,是为了方便在 s101 节点上启动所有的 Zookeeper 进程 1. xzk.sh 脚本 #!/bin/bash ; i<=; i++)) ; do t ...
- 过滤掉URL中的参数部分
//将超链接的参数部分滤掉 ?xxx if(url.contains("?")){ url=url.substring(0,url.indexOf("?")); ...
- COM动态添加删除成员,类似JavaScript中调用的对象
在JavaScript中调用对象时,可动态添加删除成员如: var obj=new Object; obj.member1='aaaaa'; obj.fun1=function() { alert(' ...
- BZOJ 1345 序列问题 单调栈
题目链接: https://www.lydsy.com/JudgeOnline/problem.php?id=1345 题目大意: 对于一个给定的序列a1,…,an,我们对它进行一个操作reduce( ...
- Wannafly挑战赛27
Wannafly挑战赛27 我打的第一场$Wannafly$是第25场,$T2$竟然出了一个几何题?而且还把我好不容易升上绿的$Rating$又降回了蓝名...之后再不敢打$Wannafly$了. 由 ...
- php.ini 常用 配置
参考:http://legolas.blog.51cto.com/2682485/493917这个文件必须命名为''php.ini''并放置在httpd.conf中的PHPIniDir指令指定的目录中 ...
- PHP错误提示的关闭方法详解
关闭PHP错误脚本提示是程序上线了必须做的一件事情,就是不管程序怎么报错我们都不能让错误日志在服务器上给大家看到,下面我来总结两种关闭PHP错误脚本提示的具体方法 最简单的办法就是直接在php ...