Lasso回归算法: 坐标轴下降法与最小角回归法小结
前面的文章对线性回归做了一个小结,文章在这: 线性回归原理小结。里面对线程回归的正则化也做了一个初步的介绍。提到了线程回归的L2正则化-Ridge回归,以及线程回归的L1正则化-Lasso回归。但是对于Lasso回归的解法没有提及,本文是对该文的补充和扩展。以下都用矩阵法表示,如果对于矩阵分析不熟悉,推荐学习张贤达的《矩阵分析与应用》。
1. 回顾线性回归
首先我们简要回归下线性回归的一般形式:
\(h_\mathbf{\theta}(\mathbf{X}) = \mathbf{X\theta}\)
需要极小化的损失函数是:
\(J(\mathbf\theta) = \frac{1}{2}(\mathbf{X\theta} - \mathbf{Y})^T(\mathbf{X\theta} - \mathbf{Y})\)
如果用梯度下降法求解,则每一轮\(\theta\)迭代的表达式是:
\(\mathbf\theta= \mathbf\theta - \alpha\mathbf{X}^T(\mathbf{X\theta} - \mathbf{Y})\)
其中\(\alpha\)为步长。
如果用最小二乘法,则\(\theta\)的结果是:
\( \mathbf{\theta} = (\mathbf{X^{T}X})^{-1}\mathbf{X^{T}Y} \)
2. 回顾Ridge回归
由于直接套用线性回归可能产生过拟合,我们需要加入正则化项,如果加入的是L2正则化项,就是Ridge回归,有时也翻译为脊回归。它和一般线性回归的区别是在损失函数上增加了一个L2正则化的项,和一个调节线性回归项和正则化项权重的系数\(\alpha\)。损失函数表达式如下:
\(J(\mathbf\theta) = \frac{1}{2}(\mathbf{X\theta} - \mathbf{Y})^T(\mathbf{X\theta} - \mathbf{Y}) + \frac{1}{2}\alpha||\theta||_2^2\)
其中\(\alpha\)为常数系数,需要进行调优。\(||\theta||_2\)为L2范数。
Ridge回归的解法和一般线性回归大同小异。如果采用梯度下降法,则每一轮\(\theta\)迭代的表达式是:
\(\mathbf\theta= \mathbf\theta - (\beta\mathbf{X}^T(\mathbf{X\theta} - \mathbf{Y}) + \alpha\theta)\)
其中\(\beta\)为步长。
如果用最小二乘法,则\(\theta\)的结果是:
\(\mathbf{\theta = (X^TX + \alpha E)^{-1}X^TY}\)
其中E为单位矩阵。
模型变量多的缺点呢?有,这就是下面说的Lasso回归。
3. 初识Lasso回归
Lasso回归有时也叫做线性回归的L1正则化,和Ridge回归的主要区别就是在正则化项,Ridge回归用的是L2正则化,而Lasso回归用的是L1正则化。Lasso回归的损失函数表达式如下:
\(J(\mathbf\theta) = \frac{1}{2n}(\mathbf{X\theta} - \mathbf{Y})^T(\mathbf{X\theta} - \mathbf{Y}) + \alpha||\theta||_1\)
其中n为样本个数,\(\alpha\)为常数系数,需要进行调优。\(||\theta||_1\)为L1范数。
4. 用坐标轴下降法求解Lasso回归
坐标轴下降法顾名思义,是沿着坐标轴的方向去下降,这和梯度下降不同。梯度下降是沿着梯度的负方向下降。不过梯度下降和坐标轴下降的共性就都是迭代法,通过启发式的方式一步步迭代求解函数的最小值。
坐标轴下降法的数学依据主要是这个结论(此处不做证明):一个可微的凸函数\(J(\theta)\), 其中\(\theta\)是nx1的向量,即有n个维度。如果在某一点\(\overline\theta\),使得\(J(\theta)\)在每一个坐标轴\(\overline\theta_i\)(i = 1,2,...n)上都是最小值,那么\(J(\overline\theta_i)\)就是一个全局的最小值。
于是我们的优化目标就是在\(\theta\)的n个坐标轴上(或者说向量的方向上)对损失函数做迭代的下降,当所有的坐标轴上的\(\theta_i\)(i = 1,2,...n)都达到收敛时,我们的损失函数最小,此时的\(\theta\)即为我们要求的结果。
下面我们看看具体的算法过程:
1. 首先,我们把\(\theta\)向量随机取一个初值。记为\(\theta^{(0)}\) ,上面的括号里面的数字代表我们迭代的轮数,当前初始轮数为0.
2. 对于第k轮的迭代。我们从\(\theta_1^{(k)}\)开始,到\(\theta_n^{(k)}\)为止,依次求\(\theta_i^{(k)}\)。\(\theta_i^{(k)}\)的表达式如下:
\( \theta_i^{(k)} \in \underbrace{argmin}_{\theta_i} J(\theta_1^{(k)}, \theta_2^{(k)}, ... \theta_{i-1}^{(k)}, \theta_i, \theta_{i+1}^{(k-1)}, ..., \theta_n^{(k-1)})\)
也就是说\( \theta_i^{(k)} \)是使\(J(\theta_1^{(k)}, \theta_2^{(k)}, ... \theta_{i-1}^{(k)}, \theta_i, \theta_{i+1}^{(k-1)}, ..., \theta_n^{(k-1)})\)最小化时候的\(\theta_i\)的值。此时\(J(\theta)\)只有\( \theta_i^{(k)} \)是变量,其余均为常量,因此最小值容易通过求导求得。
如果上面这个式子不好理解,我们具体一点,在第k轮,\(\theta\)向量的n个维度的迭代式如下:
\( \theta_1^{(k)} \in \underbrace{argmin}_{\theta_1} J(\theta_1, \theta_2^{(k-1)}, ... , \theta_n^{(k-1)})\)
\( \theta_2^{(k)} \in \underbrace{argmin}_{\theta_2} J(\theta_1^{(k)}, \theta_2, \theta_3^{(k-1)}... , \theta_n^{(k-1)})\)
...
\( \theta_n^{(k)} \in \underbrace{argmin}_{\theta_n} J(\theta_1^{(k)}, \theta_2^{(k)}, ... , \theta_{n-1}^{(k)}, \theta_n)\)
3. 检查\(\theta^{(k)}\)向量和\(\theta^{(k-1)}\)向量在各个维度上的变化情况,如果在所有维度上变化都足够小,那么\(\theta^{(k)}\)即为最终结果,否则转入2,继续第k+1轮的迭代。
以上就是坐标轴下降法的求极值过程,可以和梯度下降做一个比较:
5. 用最小角回归法求解Lasso回归
第四节介绍了坐标轴下降法求解Lasso回归的方法,此处再介绍另一种常用方法, 最小角回归法(Least Angle Regression, LARS)。
在介绍最小角回归前,我们先看看两个预备算法,好吧,这个算法真没有那么好讲。
5.1 前向选择(Forward Selection)算法
第一个预备算法是前向选择(Forward Selection)算法。
前向选择算法的原理是是一种典型的贪心算法。要解决的问题是对于:
\(\mathbf{Y = X\theta}\)这样的线性关系,如何求解系数向量\(\mathbf{\theta}\)的问题。其中\(\mathbf{Y}\)为 mx1的向量,\(\mathbf{X}\)为mxn的矩阵,\(\mathbf{\theta}\)为nx1的向量。m为样本数量,n为特征维度。
把 矩阵\(\mathbf{X}\)看做n个mx1的向量\(\mathbf{X_i}\)(i=1,2,...n),在\(\mathbf{Y}\)的\(\mathbf{X}\)变量\(\mathbf{X_i}\)(i =1,2,...m)中,选择和目标\(\mathbf{Y}\)最为接近(余弦距离最小)的一个变量\(\mathbf{X_k}\),用\(\mathbf{X_k}\)来逼近\(\mathbf{Y}\),得到下式:
\(\overline{\mathbf{Y}} = \mathbf{X_k\theta_k}\)
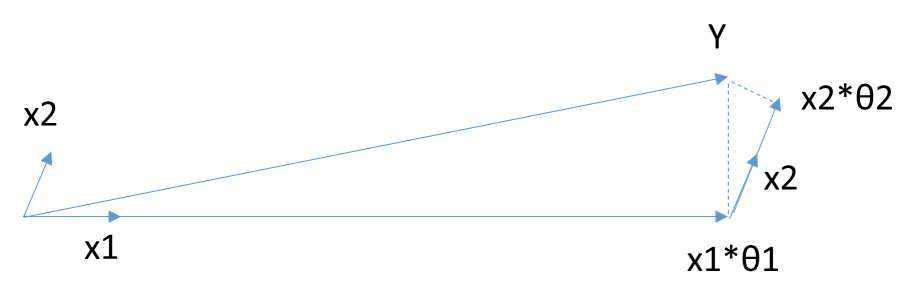
当\(\mathbf{X}\)只有2维时,例子如上图,和\(\mathbf{Y}\)最接近的是\(\mathbf{X_1}\),首先在\(\mathbf{X_1}\)上面投影,残差如上图长虚线。此时\(X_1\theta_1\)模拟了\(\mathbf{Y}\),\(\theta_1\)模拟了\(\mathbf{ \theta}\)(仅仅模拟了一个维度)。接着发现最接近的是\(\mathbf{X_2}\),此时用残差接着在\(\mathbf{X_2}\)投影,残差如图中短虚线。由于没有其他自变量了,此时\(X_1\theta_1+X_2\theta_2\)模拟了\(\mathbf{Y}\),对应的模拟了两个维度的\(\theta\)即为最终结果,此处\(\theta\)计算设计较多矩阵运算,这里不讨论。
5.2 前向梯度(Forward Stagewise)算法
第二个预备算法是前向梯度(Forward Stagewise)算法。
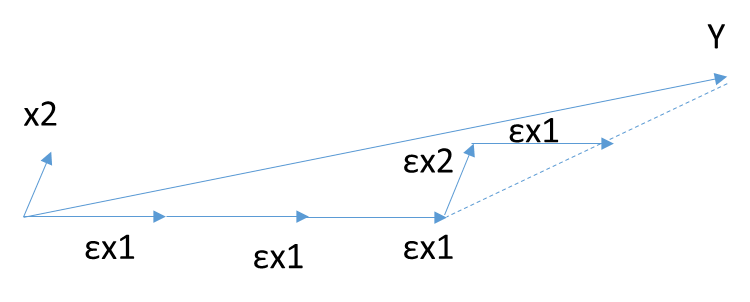
前向梯度算法和前向选择算法有类似的地方,也是在\(\mathbf{Y}\)的\(\mathbf{X}\)变量\(\mathbf{X_i}\)(i =1,2,...n)中,选择和目标\(\mathbf{Y}\)最为接近(余弦距离最小)的一个变量\(\mathbf{X_k}\),用\(\mathbf{X_k}\)来逼近\(\mathbf{Y}\),但是前向梯度算法不是粗暴的用投影,而是每次在最为接近的自变量\(\mathbf{X_t}\)的方向移动一小步,然后再看残差\(\mathbf{Y_{yes}}\)和哪个\(\mathbf{X_i}\)(i =1,2,...n)最为接近。此时我们也不会把\(\mathbf{X_t}\) 去除,因为我们只是前进了一小步,有可能下面最接近的自变量还是\(\mathbf{X_t}\)。如此进行下去,直到残差\(\mathbf{Y_{yes}} \)减小到足够小,算法停止。
有没有折中的办法可以综合前向梯度算法和前向选择算法的优点,做一个折中呢?有!这就是终于要出场的最小角回归法。
5.3 最小角回归(Least Angle Regression, LARS)算法
好吧,最小角回归(Least Angle Regression, LARS)算法终于出场了。最小角回归法对前向梯度算法和前向选择算法做了折中,保留了前向梯度算法一定程度的精确性,同时简化了前向梯度算法一步步迭代的过程。具体算法是这样的:
首先,还是找到与因变量\(\mathbf{Y}\)最接近或者相关度最高的自变量\(\mathbf{X_k}\),使用类似于前向梯度算法中的残差计算方法,得到新的目标\(\mathbf{Y_{yes}}\),此时不用和前向梯度算法一样小步小步的走。而是直接向前走直到出现一个\(\mathbf{X_t}\),使得\(\mathbf{X_t}\)和\(\mathbf{Y_{yes}}\)的相关度和\(\mathbf{X_k}\)与\(\mathbf{Y_{yes}}\)的相关度是一样的,此时残差\(\mathbf{Y_{yes}}\)就在\(\mathbf{X_t}\)和\(\mathbf{X_k}\)的角平分线方向上,此时我们开始沿着这个残差角平分线走,直到出现第三个特征\(\mathbf{X_p}\)和\(\mathbf{Y_{yes}}\)的相关度足够大的时候,即\(\mathbf{X_p}\)到当前残差\(\mathbf{Y_{yes}}\)的相关度和\(\theta_t\),\(\theta_k\)与\(\mathbf{Y_{yes}}\)的一样。将其也叫入到\(\mathbf{Y}\)的逼近特征集合中,并用\(\mathbf{Y}\)的逼近特征集合的共同角分线,作为新的逼近方向。以此循环,直到\(\mathbf{Y_{yes}}\)足够的小,或者说所有的变量都已经取完了,算法停止。此时对应的系数\(\theta\)即为最终结果。
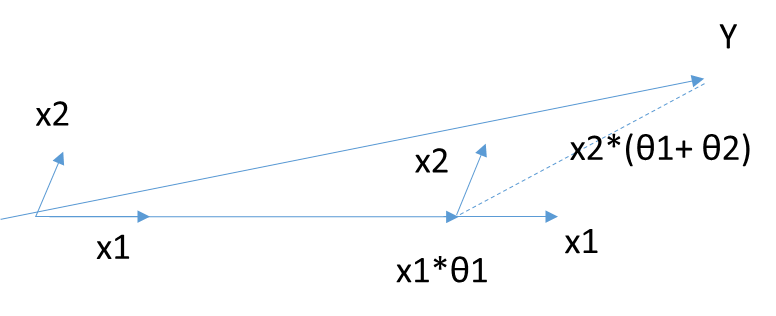
当\(\theta\)只有2维时,例子如上图,和\(\mathbf{Y}\)最接近的是\(\mathbf{X_1}\),首先在\(\mathbf{X_1}\)上面走一段距离,一直到残差在\(\mathbf{X_1}\)和\(\mathbf{X_2}\)的角平分线上,此时沿着角平分线走,直到残差最够小时停止,此时对应的系数\(\beta\)即为最终结果。此处\(\theta\)计算设计较多矩阵运算,这里不讨论。
最小角回归法是一个适用于高维数据的回归算法,其主要的优点有:
1)特别适合于特征维度n 远高于样本数m的情况。
2)算法的最坏计算复杂度和最小二乘法类似,但是其计算速度几乎和前向选择算法一样
3)可以产生分段线性结果的完整路径,这在模型的交叉验证中极为有用
主要的缺点是:
由于LARS的迭代方向是根据目标的残差而定,所以该算法对样本的噪声极为敏感。
6. 总结
Lasso回归是在ridge回归的基础上发展起来的,如果模型的特征非常多,需要压缩,那么Lasso回归是很好的选择。一般的情况下,普通的线性回归模型就够了。
另外,本文对最小角回归法怎么求具体的\(\theta\)参数值没有提及,仅仅涉及了原理,如果对具体的算计推导有兴趣,可以参考Bradley Efron的论文《Least Angle Regression》,网上很容易找到。
(欢迎转载,转载请注明出处。欢迎沟通交流: pinard.liu@ericsson.com)
Lasso回归算法: 坐标轴下降法与最小角回归法小结的更多相关文章
- 机器学习方法:回归(三):最小角回归Least Angle Regression(LARS),forward stagewise selection
欢迎转载,转载请注明:本文出自Bin的专栏blog.csdn.net/xbinworld. 希望与志同道合的朋友一起交流,我刚刚设立了了一个技术交流QQ群:433250724,欢迎对算法.技术.应用感 ...
- A-06 最小角回归法
目录 最小角回归法 一.举例 二.最小角回归法优缺点 2.1 优点 2.2 缺点 三.小结 更新.更全的<机器学习>的更新网站,更有python.go.数据结构与算法.爬虫.人工智能教学等 ...
- 最小角回归 LARS算法包的用法以及模型参数的选择(R语言 )
Lasso回归模型,是常用线性回归的模型,当模型维度较高时,Lasso算法通过求解稀疏解对模型进行变量选择.Lars算法则提供了一种快速求解该模型的方法.Lars算法的基本原理有许多其他文章可以参考, ...
- 回归算法比较(线性回归,Ridge回归,Lasso回归)
代码: # -*- coding: utf-8 -*- """ Created on Mon Jul 16 09:08:09 2018 @author: zhen &qu ...
- LARS 最小角回归算法简介
最近开始看Elements of Statistical Learning, 今天的内容是线性模型(第三章..这本书东西非常多,不知道何年何月才能读完了),主要是在看变量选择.感觉变量选择这一块领域非 ...
- 从最小角回归(LARS)中学到的一个小知识(很短)
[转载请注明出处]http://www.cnblogs.com/mashiqi (居然有朋友说内容不接地气,那么我就再加一段嘛,请喜欢读笑话的同学直接看第二段)假设这里有一组向量$\left\{ x_ ...
- Lasso回归的坐标下降法推导
目标函数 Lasso相当于带有L1正则化项的线性回归.先看下目标函数:RSS(w)+λ∥w∥1=∑Ni=0(yi−∑Dj=0wjhj(xi))2+λ∑Dj=0∣wj∣RSS(w)+λ∥w∥1=∑i=0 ...
- SparkMLlib学习分类算法之逻辑回归算法
SparkMLlib学习分类算法之逻辑回归算法 (一),逻辑回归算法的概念(参考网址:http://blog.csdn.net/sinat_33761963/article/details/51693 ...
- SparkMLlib分类算法之逻辑回归算法
SparkMLlib分类算法之逻辑回归算法 (一),逻辑回归算法的概念(参考网址:http://blog.csdn.net/sinat_33761963/article/details/5169383 ...
随机推荐
- touches 事件捕获不到
在UIView上加载了一个UIScrollView(全屏),touches 事件捕获不到了 原因:UIView的touch事件被UIScrollView捕获了,无法传递下去 解决方法:写一个UIScr ...
- CI生成查询记录集result(),row(),row_array().....
result() 该方法执行成功返回一个对象数组,失败则返回一个空数组. 一般情况下,我们使用下面的方法遍历结果,代码就像这样: $query = $this->db->query(&qu ...
- WebService的开发、部署、调用
本文参考其它文章和自己解决中间问题的经历记录,以C#开发WebService为例子,欢迎探讨: 一.C#开发WebService 在visual studio中新建ASP.NET Web服务应用程序, ...
- RunLoop
一.什么是RunLoop 从字面意思理解:运行循环.跑圈. 基本作用: 保持程序(应用)的持续运行. 处理程序(APP)中的各种事件(比如:触摸事件.定时事件.Selector事件等) 节省CPU资源 ...
- iOS开发——post异步网络请求封装
IOS中有许多网络请求的函数,同步的,异步的,通过delegate异步回调的. 在做一个项目的时候,上网看了很多别人的例子,发现都没有一个简单的,方便的异步请求的封装例子.我这里要给出的封装代码,是异 ...
- $.load()的用法
jquery load 事件用法 jquery load 事件用法 如果绑定给window对象,则会在所有内容加载后触发,包括窗口,框架,对象和图像.如果绑定在元素上,则当元素的内容加载完毕后触发. ...
- ecshop二次开发 购物车添加备注信息
- SSH学习笔记
Struts2登录模块处理流程: 浏览器发送请求http://localhost/appname/login.action,到web应用服务器: 容器接收到该请求,根据web.xml的配置,服务器将请 ...
- ASP.Net WebForm温故知新学习笔记:二、ViewState与UpdatePanel探秘
开篇:经历了上一篇<aspx与服务器控件探秘>后,我们了解了aspx和服务器控件背后的故事.这篇我们开始走进WebForm状态保持的一大法宝—ViewState,对其刨根究底一下.然后,再 ...
- [.net 面向对象编程基础] (1) 开篇
[.net 面向对象编程基础] (1)开篇 使用.net进行面向对象编程也有好长一段时间了,整天都忙于赶项目,完成项目任务之中.最近偶有闲暇,看了项目组中的同学写的代码,感慨颇深.感觉除了定义个类,就 ...