ROS-URDF-建立模型
前言:建立一个简单的urdf模型
教程写的非常好,这里只做最终版解析部分。
查看是否安装了joint_state_publisher功能包:
rospack find joint_state_publisher
一、基本模型
1.1 新建urdf_tutorial功能包
1.2 新建urdf文件
新建01-myfirst.urdf文件
<?xml version="1.0"?>
<robot name="materials">
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<link name="right_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="right_leg"/>
<origin xyz="0 -0.22 0.25"/>
</joint>
<link name="left_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_left_leg" type="fixed">
<parent link="base_link"/>
<child link="left_leg"/>
<origin xyz="0 0.22 0.25"/>
</joint>
</robot>
----------------------------------------------------------------------------------------------------------------------------
代码解释:
<robot name="materials">此文件的机器人名称
<material name="blue">定义材料属性名称为蓝色
<color rgba="0 0 0.8 1"/>材料属性为rgba值
</material>
<link name="base_link">定义基本连杆
<visual>可视化属性
<geometry>几何形状
<cylinder length="0.6" radius="0.2"/>圆柱,半径0.2米,高0.6米
</geometry>
<material name="blue"/>材料属性引用为蓝色
</visual>
</link>
<link name="right_leg">定义右腿连杆
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>盒状,长宽高为0.6米,0.1米,0.2米
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>位置,位于关节点base_to_right_legz轴负方向0.3米,绕y轴旋转90°=π/2=1.57075
<material name="white"/>
</visual>
<joint name="base_to_right_leg" type="fixed">定义基本连杆和右腿之间的关节,属性为固定。其实就是新建了一个相对坐标系。
<parent link="base_link"/>父连杆为base_link
<child link="right_leg"/>子连杆为right_leg
<origin xyz="0 -0.22 0.25"/>关节位置,位于父连杆关节y轴负方向0.22米,z轴正方向0.25米
</joint>
----------------------------------------------------------------------------------------------------------------------------
1.3 新建launch文件
<launch> <arg name="model" default="$(find urdf_tutorial)/urdf/01-myfirst.urdf"/> <arg name="gui" default="true" /> <arg name="rvizconfig" default="$(find urdf_tutorial)/rviz/urdf.rviz" /> <param name="robot_description" command="$(find xacro)/xacro --inorder $(arg model)" /> <param name="use_gui" value="$(arg gui)"/> <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" /> <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" /> <node name="rviz" pkg="rviz" type="rviz" args="-d $(arg rvizconfig)" required="true" /> </launch>
1.4 查看模型
roslaunch urdf_tutorial display.launch

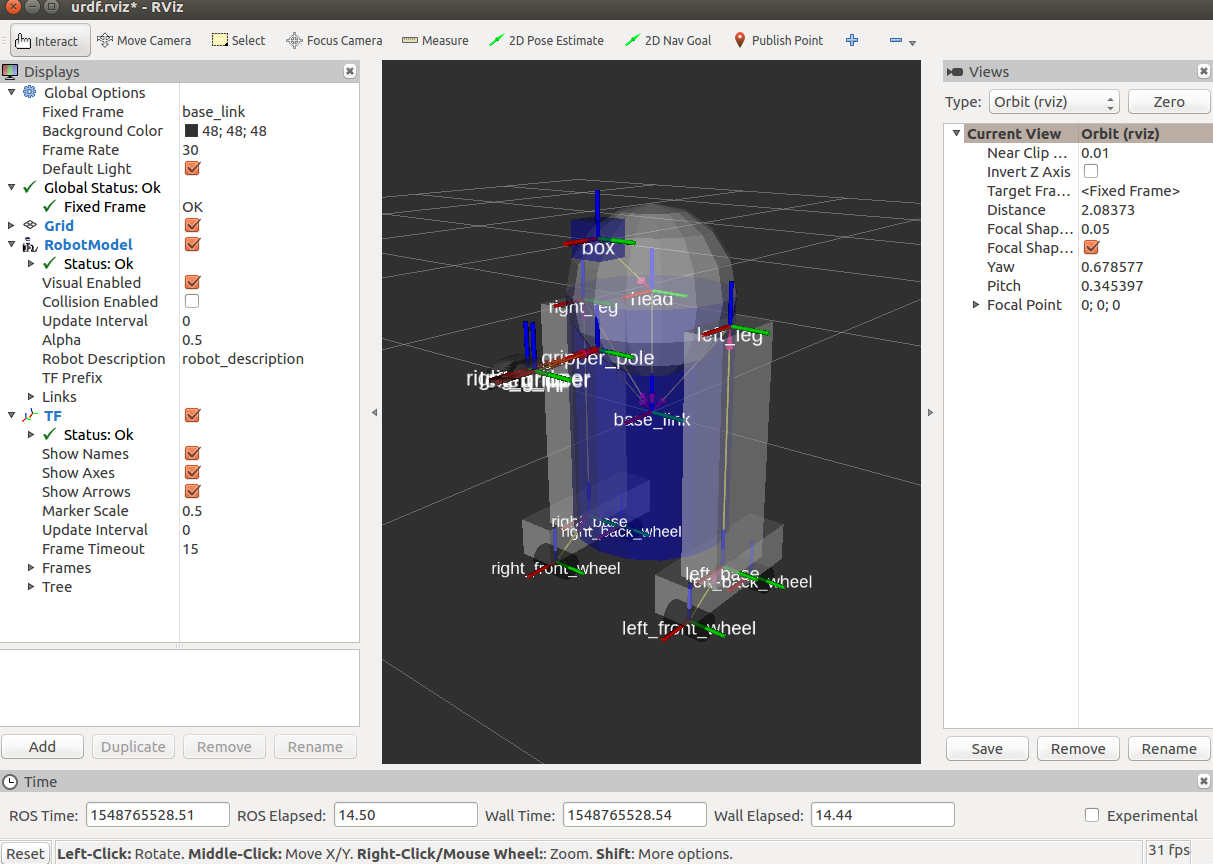
二、进阶模型
2.1 修改urdf文件
<?xml version="1.0"?>
<robot name="visual">
<material name="blue">
<color rgba="0 0 0.8 1"/>
</material>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
<link name="base_link">
<visual>
<geometry>
<cylinder length="0.6" radius="0.2"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<link name="right_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_right_leg" type="fixed">
<parent link="base_link"/>
<child link="right_leg"/>
<origin xyz="0 -0.22 0.25"/>
</joint>
<link name="right_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="right_base_joint" type="fixed">
<parent link="right_leg"/>
<child link="right_base"/>
<origin xyz="0 0 -0.6"/>
</joint>
<link name="right_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
<origin rpy="0 0 0" xyz="0 0 0"/>
</visual>
</link>
<joint name="right_front_wheel_joint" type="fixed">
<parent link="right_base"/>
<child link="right_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
</joint>
<link name="right_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="right_back_wheel_joint" type="fixed">
<parent link="right_base"/>
<child link="right_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
</joint>
<link name="left_leg">
<visual>
<geometry>
<box size="0.6 0.1 0.2"/>
</geometry>
<origin rpy="0 1.57075 0" xyz="0 0 -0.3"/>
<material name="white"/>
</visual>
</link>
<joint name="base_to_left_leg" type="fixed">
<parent link="base_link"/>
<child link="left_leg"/>
<origin xyz="0 0.22 0.25"/>
</joint>
<link name="left_base">
<visual>
<geometry>
<box size="0.4 0.1 0.1"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="left_base_joint" type="fixed">
<parent link="left_leg"/>
<child link="left_base"/>
<origin xyz="0 0 -0.6"/>
</joint>
<link name="left_front_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="left_front_wheel_joint" type="fixed">
<parent link="left_base"/>
<child link="left_front_wheel"/>
<origin rpy="0 0 0" xyz="0.133333333333 0 -0.085"/>
</joint>
<link name="left_back_wheel">
<visual>
<origin rpy="1.57075 0 0" xyz="0 0 0"/>
<geometry>
<cylinder length="0.1" radius="0.035"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="left_back_wheel_joint" type="fixed">
<parent link="left_base"/>
<child link="left_back_wheel"/>
<origin rpy="0 0 0" xyz="-0.133333333333 0 -0.085"/>
</joint>
<joint name="gripper_extension" type="fixed">
<parent link="base_link"/>
<child link="gripper_pole"/>
<origin rpy="0 0 0" xyz="0.19 0 0.2"/>
</joint>
<link name="gripper_pole">
<visual>
<geometry>
<cylinder length="0.2" radius="0.01"/>
</geometry>
<origin rpy="0 1.57075 0 " xyz="0.1 0 0"/>
</visual>
</link>
<joint name="left_gripper_joint" type="fixed">
<origin rpy="0 0 0" xyz="0.2 0.01 0"/>
<parent link="gripper_pole"/>
<child link="left_gripper"/>
</joint>
<link name="left_gripper">
<visual>
<origin rpy="0.0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
</geometry>
</visual>
</link>
<joint name="left_tip_joint" type="fixed">
<parent link="left_gripper"/>
<child link="left_tip"/>
</joint>
<link name="left_tip">
<visual>
<origin rpy="0.0 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
</geometry>
</visual>
</link>
<joint name="right_gripper_joint" type="fixed">
<origin rpy="0 0 0" xyz="0.2 -0.01 0"/>
<parent link="gripper_pole"/>
<child link="right_gripper"/>
</joint>
<link name="right_gripper">
<visual>
<origin rpy="-3.1415 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger.dae"/>
</geometry>
</visual>
</link>
<joint name="right_tip_joint" type="fixed">
<parent link="right_gripper"/>
<child link="right_tip"/>
</joint>
<link name="right_tip">
<visual>
<origin rpy="-3.1415 0 0" xyz="0.09137 0.00495 0"/>
<geometry>
<mesh filename="package://urdf_tutorial/meshes/l_finger_tip.dae"/>
</geometry>
</visual>
</link>
<link name="head">
<visual>
<geometry>
<sphere radius="0.2"/>
</geometry>
<material name="white"/>
</visual>
</link>
<joint name="head_swivel" type="fixed">
<parent link="base_link"/>
<child link="head"/>
<origin xyz="0 0 0.3"/>
</joint>
<link name="box">
<visual>
<geometry>
<box size="0.08 0.08 0.08"/>
</geometry>
<material name="blue"/>
</visual>
</link>
<joint name="tobox" type="fixed">
<parent link="head"/>
<child link="box"/>
<origin xyz="0.1814 0 0.1414"/>
</joint>
</robot>
--------------------------------------------------------------------------
部分代码解释:
<geometry >
<mesh filename = “package://urdf_tutorial/meshes/l_finger.dae” /> 几何形状可以引用外部dae文件
</geometry>
2.2 运行launch文件
-END-
ROS-URDF-建立模型的更多相关文章
- 【探索之路】机器人篇(3)-给mwRobot建立模型
在创建一个mwRobot_description程序包那一节中,我们添加了依赖roscpp rospy std_msgs 和 urdf , 现在我们再添加一个xacro依赖. 如何添加依赖? 打开程 ...
- 揭秘Keras推荐系统如何建立模型、获取用户爱好
你是否有过这样的经历?当你在亚马逊商城浏览一些书籍,或者购买过一些书籍后,你的偏好就会被系统学到,系统会基于一些假设为你推荐相关书目.为什么系统会知道,在这背后又藏着哪些秘密呢? 荐系统可以从百万甚至 ...
- django模型:为已存在的表建立模型
为已经存在的表建立模型:参考https://blog.csdn.net/opera95/article/details/78200024 为已经存在的表建立模型1.python manage.py i ...
- pytorch 建立模型的几种方法
利用pytorch来构建网络模型,常用的有如下三种方式 前向传播网络具有如下结构: 卷积层-->Relu层-->池化层-->全连接层-->Relu层 对各Conv2d和Line ...
- 中文代码之Django官方入门:建立模型
参考编写你的第一个 Django 应用,第 2 部分 创建项目后,首先用中文命名应用: $ python3 manage.py startapp 投票 之后在models.py建立模型,其他各种相关配 ...
- 黑马程序员——ARC机制总结和用ARC建立模型
ARC 全称:Automatic Reference Counting 使用ARC 只需要在建立一个新的项目的时候把 下面的√打上 Xcode5以后都会默认建议开发者使用ARC机制 新的项目中如果有部 ...
- entity framework 新手入门篇(1)-建立模型
entity framework是微软官方免费提供给大家的一套ORM(Object Relational Mapping对象关系映射)解决方案.它不仅可以帮助我们解决数据缓存的问题,还能在最小的开销下 ...
- iOS开发之字典数据建立模型步骤
1. 在控制器属性的(questions)set方法中完成字典转模型的操作 - (NSArray *)questions { if (nil == _questions) { //1.加载plist文 ...
- [Kaggle] dogs-vs-cats之建立模型
建立神经网络模型,下面要建立的模型如下: (上图来源:训练网络时,打开tensorboard即可观察网络结构,在下一节模型训练的时候会讲到) 下面为具体步骤: Step 0:导入相关库 import ...
- ROS(URDF机器人建模)
新建功能包mbot_description 在功能包下新建文件config,launch,meshes,urdf. 在launch文件夹下新建文件display_mbot_base_urdf.laun ...
随机推荐
- jquery 实现 单选框点击取消
<label for="1" class="z-label"> <input type="radio" class=&qu ...
- loader__demo_css
环境 node + yarn + webpack4.0 + webpack-cli + style-loader css-loader 文件结构 │ package.json │ webpack.co ...
- JS对象中,在原型链上找到属性后 最终将值拷贝给原对象 而不是引用
遇到一个面试题 要求写一个函数A,每次进行new操作时候能输出2,3,4,5... new A() // 输出2 new A() // 输出3 new A() // 输出4 function A() ...
- [SQL Server] 常用sql脚本
1.添加表 GO IF NOT EXISTS(SELECT * FROM sys.tables WHERE name='table_name') BEGIN CREATE TABLE [dbo].[t ...
- MySQL多表连接操作
select * from userinfo ,dapartment where userinfo.part_id = dapartment.id; --左连接: 左边全部显示 select * fr ...
- BZOJ 1602 USACO 2008 Oct. 牧场行走
[题解] 要求出树上两点间的距离,树上的边有边权,本来应该是个LCA. 看他数据小,Xjb水过去了...其实也算是LCA吧,一个O(n)的LCA... #include<cstdio> # ...
- java 同时安装多版本问题
java 同时安装多版本问题(转) http://www.cnblogs.com/SamuelSun/p/6022296.html http://blog.csdn.net/u013256622/ar ...
- 赛门铁克通配符SSL证书,一张通配型证书实现全站加密
赛门铁克通配型SSL证书,验证域名所有权和企业信息,属于企业验证(OV) 级SSL证书,最高支持256位加密.申请通配符SSL证书可以保护相同主域名下无限数量的多个子域名(主机).例如,一个通配符 ...
- prime算法邻接表写法
#include <iostream> #include <queue> using namespace std; typedef struct { long v; long ...
- HDU 4503
可以反过来求不是相同关系的小朋友.相当于染色问题吧. 对于A小朋友,它的T个朋友和另外的(N-1-T)个同学就可以组成一个这样的三角形.T*(N-1-T),由于一条非染色边被计算两次,所以除以2. # ...