玩转X-CTR100 l STM32F4 l DSP指令集性能测试

我造轮子,你造车,创客一起造起来!塔克创新资讯【塔克社区 www.xtark.cn 】【塔克博客 www.cnblogs.com/xtark/ 】
本文介绍X-CTR100控制器 DSP库的使用,对STM32F4的DSP库有个基本的了解,并针对三角函数有无DSP指令进行性能测试。
原理
STM32F4采用Cortex-M4内核,相比Cortex-M3系列除了内置硬件FPU单元,在数字信号处理方面还增加了DSP指令集,支持诸如单周期乘加指令(MAC),优化的单指令多数据指令(SIMD),饱和算数等多种数字信号处理指令集。相比Cortex-M3,Cortex-M4在数字信号处理能力方面得到了大大的提升。Cortex-M4执行所有的DSP指令集都可以在单周期内完成,而Cortex-M3需要多个指令和多个周期才能完成同样的功能。
ST官方提供了一整套的DSP库方便我们开发使用,在ST提供的标准库:stm32f4_dsp_stdperiph_lib.zip里面就有。
目录STM32F4xx_DSP_StdPeriph_Lib_V1.4.0→Libraries→CMSIS→DSP_Lib下可以找到DSP库文件和测试实例。
Sourse中是所有DSP库文件源代码,Examples文件夹下是一些测试实例。
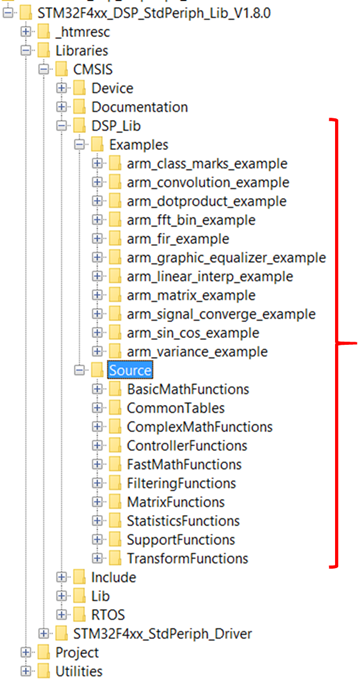
DSP库主要包含以下几个分库:
BasicMathFunctions
基本数学函数:提供浮点数的各种基本运算函数,如向量加减乘除等运算。
CommonTables
arm_common_tables.c文件提供位翻转或相关参数表。
ComplexMathFunctions
复杂数学功能,如向量处理,求模运算的。
ControllerFunctions
控制功能函数。包括正弦余弦,PID电机控制,矢量Clarke变换,矢量Clarke逆变换等。
FastMathFunctions
快速数学功能函数。提供了一种快速的近似正弦,余弦和平方根等相比CMSIS计算库要快的数学函数。
FilteringFunctions
滤波函数功能,主要为FIR和LMS(最小均方根)等滤波函数。MatrixFunctions
矩阵处理函数。包括矩阵加法、矩阵初始化、矩阵反、矩阵乘法、矩阵规模、矩阵减法、矩阵转置等函数。
StatisticsFunctions
统计功能函数。如求平均值、最大值、最小值、计算均方根RMS、计算方差/标准差等。
SupportFunctions
支持功能函数,如数据拷贝,Q格式和浮点格式相互转换,Q任意格式相互转换。
TransformFunctions
变换功能。包括复数FFT(CFFT)/复数FFT逆运算(CIFFT)、实数FFT(RFFT)/实数FFT逆运算(RIFFT)、和DCT(离散余弦变换)和配套的初始化函数。
ST提供了.lib格式的文件,方便使用这些库。这些.lib文件就是由Source文件夹下的源码编译生成的,如果想看某个函数的源码,可以在Source文件夹下面查找。.lib格式文件路径:STM32F4xx_DSP_StdPeriph_Lib_V1.4.0→Libraries→CMSIS→Lib→ARM,总共有8个.lib文件,和M4F相关的有两个:
arm_cortexM4bf_math.lib(浮点Cortex-M4大端模式)
arm_cortexM4lf_math.lib(浮点Cortex-M4小端模式)
STM32F4的内核CortexM4F采用小端模式,所以选择:arm_cortexM4lf_math.lib(浮点Cortex-M4小端模式)。
例程
本例程 通过计算两种方法计算三角函数,测量计算时间,间接进行性能对比。
硬件说明
硬件资源:
- 串口UART1
硬件连接:
使用MicroUSB数据线连接X-CTR100 COM接口。
软件说明
将DSP Lib库加入到工程,相关头文件已在X工程模板中加入。
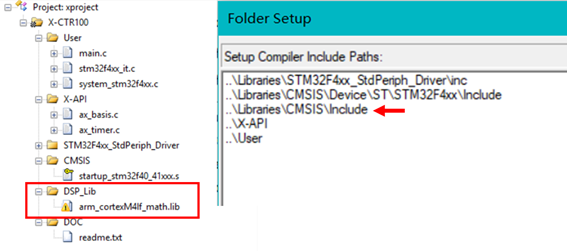
使用DSP库的所有功能,还需要添加以下几个全局宏定义:
1、__FPU_USED
2、__FPU_PRESENT
3、ARM_MATH_CM4
4、__CC_ARM
5、ARM_MATH_MATRIX_CHECK
6、ARM_MATH_ROUNDING
在main.c文件中包含如下头文件。
|
#include #include |
测试代码如下,分别使用DSP库三角函数和标准三角函数进行计算,测量计算时间,时间越少性能越好。
|
int main(void) { uint32_t i, tmp; float angle; float sinx, cosx;
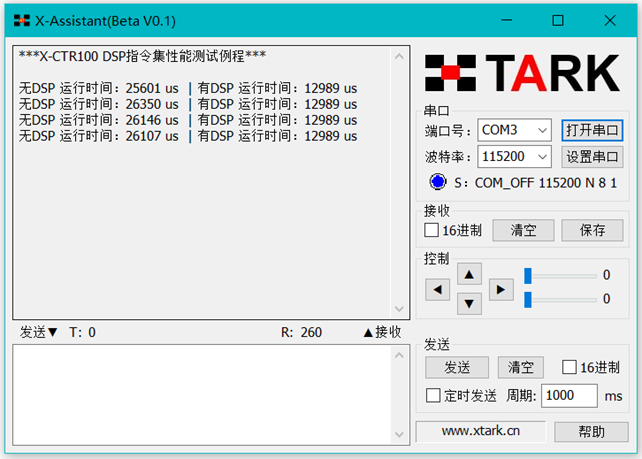
/* X-CTR100初始化 */ AX_Init(115200); printf("***X-CTR100 DSP指令集性能测试例程***\r\n\r\n");
//模块初始化及配置 AX_TIMER_TIM6_Init(1);
while (1) { //不使用DSP优化的sin,cos函数 AX_TIMER_TIM6_SetCounter(0); for (i = 0; i<20000; i++) { cosx = cosf(angle); sinx = sinf(angle); angle += 0.001f;//角度自增 } tmp = AX_TIMER_TIM6_GetCountert(); printf("无DSP 运行时间:%d us | ", tmp);
//有使用DSP优化的sin,cos函数 AX_TIMER_TIM6_SetCounter(0); for (i = 0; i<20000; i++) { cosx = arm_cos_f32(angle); sinx = arm_cos_f32(angle); angle += 0.001f;//角度自增 } tmp = AX_TIMER_TIM6_GetCountert(); printf("有DSP 运行时间:%d us \r\n", tmp);
AX_Delayms(1000); AX_LEDG_Toggle(); } } |
实现效果
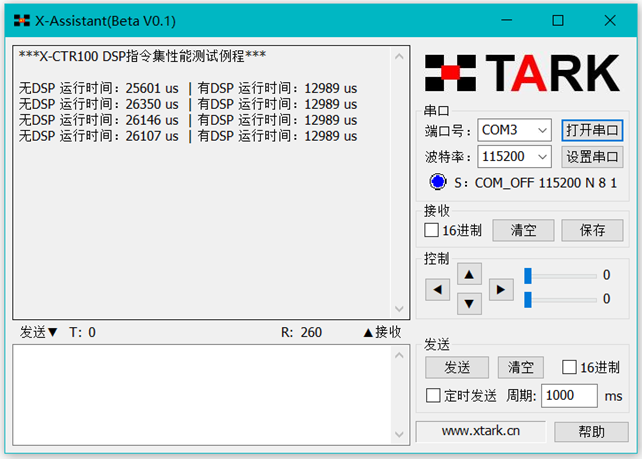
测试结果如下图,有DSP情况下计算速度提升约1倍左右。
总结
通过本文学习,可以了解STM32F4DSP指令集及ST提供DSP库的使用。项目中如果需要频繁的数学运算,并有性能要求,建议使用DSP相关计算函数。
参考
正点原子——ALIENTEK探索者STM32F407开发板相关资料
玩转X-CTR100 l STM32F4 l DSP指令集性能测试的更多相关文章
- 玩转X-CTR100 l STM32F4 l ADC 模拟数字转换
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 AD转换接 ...
- 玩转X-CTR100 l STM32F4 l MPU6050加速度陀螺仪传感器
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器 板载加速度 ...
- 玩转X-CTR100 l STM32F4 l X-CTR100与树莓派搭建机器人平台
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器与树莓派Linux系统 ...
- 玩转X-CTR100 l STM32F4 l UCOS-III移植
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 概述 前后台系统 简单的小型系统设计一般是基于前后台 ...
- 玩转X-CTR100 l STM32F4 l 舵机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器的舵机控制,X-CTR ...
- 玩转X-CTR100 l STM32F4 l DRV8825 A4988 步进电机控制
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器控制步进电机 ...
- 玩转X-CTR100 l STM32F4 l 基础例程printf、LED、蜂鸣器、拨码开关、位带操作
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器基础板载资源 ...
- 玩转X-CTR100 l STM32F4 l PS2无线手柄
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] SONY的PS2无线手柄是索尼游戏机的遥控手柄,控制 ...
- 玩转X-CTR100 l STM32F4 l FPU单精度浮点性能测试
我造轮子,你造车,创客一起造起来!塔克创新资讯[塔克社区 www.xtark.cn ][塔克博客 www.cnblogs.com/xtark/ ] 本文介绍X-CTR100控制器如何开启ST ...
随机推荐
- Bioconductor(Bioconductor for Genomic Data Science教程)
Bioconductor for Genomic Data Science ftp://ftp.ncbi.nlm.nih.gov/genomes/archive/old_genbank/Bacteri ...
- 抽离amazeUI里面的弹出框
花了一些时间读了amazeUI的源码 把他的弹出框给单独抽离出来了,具体可以见源码:http://pan.baidu.com/s/1mibQ9T2
- Vue音乐项目笔记(一)
看到一位小可爱的手记,这里记录一下自己需要注意的地方的链接 1.手写轮播图(上) https://blog.csdn.net/weixin_40814356/article/details/80298 ...
- SWUST OJ(955)
单链表上查找算法的实现 #include <stdio.h> #include <stdlib.h> typedef struct LinkNode //单链表节点结构的定义 ...
- DP 租用游艇
洛谷P1359租用游艇 分析:这个游艇我看到题目下意识的就想将dp数组设为dp[i][j]表示i到j之间的最短距离,但题目上要求的只是从起点到终点的距离,这样设只是自找麻烦. 直接设成dp[i]表示从 ...
- DP 传球问题
洛谷P1057 传球问题 分析:经过m次传球到第i个人的方法可以由经过m-1次传球到第i个人和到第i-1个人传递得来 设dp[i][j]为经过j次传球后到达第i个人的方法数,可得到状态转移方程为: d ...
- 多线程总结2之volatile和synchronized(转)
本文转自 http://www.jasongj.com/java/thread_safe/ 一.多线程编程中的三个核心概念 本篇文章将从这三个问题出发,结合实例详解volatile如何保证可见性及一定 ...
- css中伪类与伪元素的区别
一:伪类:1:定义:css伪类用于向某些选择器添加特殊效果. 伪类其实与普通的css类相类似,可以为已有的元素添加样式,但是他只有处于dom无法描述的状态下才能为文档树中的元素添加样式,所以将其称为伪 ...
- 51nod-1181-两次筛法
1181 质数中的质数(质数筛法) 题目来源: Sgu 基准时间限制:1 秒 空间限制:131072 KB 分值: 0 难度:基础题 收藏 关注 如果一个质数,在质数列表中的编号也是质数,那么就 ...
- 函数使用六:ABAP4_CALL_TRANSACTION
此函数是在程序中调用一个事物代码,跳转或者执行事物代码的程序. 参数说明: Import TCODE 执行的事物代码 SKIP_SCREEN ...