Space Ant(极角排序)
Space Ant
http://poj.org/problem?id=1696
| Time Limit: 1000MS | Memory Limit: 10000K | |
| Total Submissions: 5371 | Accepted: 3343 |
Description
- It can not turn right due to its special body structure.
- It leaves a red path while walking.
- It hates to pass over a previously red colored path, and never does that.
The pictures transmitted by the Discovery space ship depicts that plants in the Y1999 grow in special points on the planet. Analysis of several thousands of the pictures have resulted in discovering a magic coordinate system governing the grow points of the plants. In this coordinate system with x and y axes, no two plants share the same x or y.
An M11 needs to eat exactly one plant in each day to stay alive. When it eats one plant, it remains there for the rest of the day with no move. Next day, it looks for another plant to go there and eat it. If it can not reach any other plant it dies by the end of the day. Notice that it can reach a plant in any distance.
The problem is to find a path for an M11 to let it live longest.
Input is a set of (x, y) coordinates of plants. Suppose A with the coordinates (xA, yA) is the plant with the least y-coordinate. M11 starts from point (0,yA) heading towards plant A. Notice that the solution path should not cross itself and all of the turns should be counter-clockwise. Also note that the solution may visit more than two plants located on a same straight line. 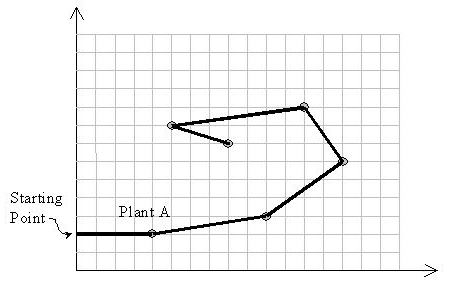
Input
Output
Sample Input
2
10
1 4 5
2 9 8
3 5 9
4 1 7
5 3 2
6 6 3
7 10 10
8 8 1
9 2 4
10 7 6
14
1 6 11
2 11 9
3 8 7
4 12 8
5 9 20
6 3 2
7 1 6
8 2 13
9 15 1
10 14 17
11 13 19
12 5 18
13 7 3
14 10 16
Sample Output
10 8 7 3 4 9 5 6 2 1 10
14 9 10 11 5 12 8 7 6 13 4 14 1 3 2
找到最左下的点,然后对极角排序即可
#include<cstdio>
#include<iostream>
#include<vector>
#include<cstring>
#include<algorithm>
#include<cmath>
using namespace std;
const double eps=1e-;
const double INF=1e20;
const double PI=acos(-1.0);
const int maxp=;
int sgn(double x){
if(fabs(x)<eps) return ;
if(x<) return -;
else return ;
}
inline double sqr(double x){return x*x;}
struct Point{
int pos;
double x,y;
Point(){}
Point(double _x,double _y){
x=_x;
y=_y;
}
void input(){
scanf("%lf %lf",&x,&y);
}
void output(){
printf("%.2f %.2f\n",x,y);
}
bool operator == (const Point &b)const{
return sgn(x-b.x) == && sgn(y-b.y)== ;
}
bool operator < (const Point &b)const{
return sgn(x-b.x)==?sgn(y-b.y)<:x<b.x;
}
Point operator - (const Point &b)const{
return Point(x-b.x,y-b.y);
}
//叉积
double operator ^ (const Point &b)const{
return x*b.y-y*b.x;
}
//点积
double operator * (const Point &b)const{
return x*b.x+y*b.y;
}
//返回长度
double len(){
return hypot(x,y);
}
//返回长度的平方
double len2(){
return x*x+y*y;
}
//返回两点的距离
double distance(Point p){
return hypot(x-p.x,y-p.y);
}
Point operator + (const Point &b)const{
return Point(x+b.x,y+b.y);
}
Point operator * (const double &k)const{
return Point(x*k,y*k);
}
Point operator / (const double &k)const{
return Point(x/k,y/k);
} //计算pa和pb的夹角
//就是求这个点看a,b所成的夹角
///LightOJ1202
double rad(Point a,Point b){
Point p=*this;
return fabs(atan2(fabs((a-p)^(b-p)),(a-p)*(b-p)));
}
//化为长度为r的向量
Point trunc(double r){
double l=len();
if(!sgn(l)) return *this;
r/=l;
return Point(x*r,y*r);
}
//逆时针转90度
Point rotleft(){
return Point(-y,x);
}
//顺时针转90度
Point rotright(){
return Point(y,-x);
}
//绕着p点逆时针旋转angle
Point rotate(Point p,double angle){
Point v=(*this) -p;
double c=cos(angle),s=sin(angle);
return Point(p.x+v.x*c-v.y*s,p.y+v.x*s+v.y*c);
}
}; struct Line{
Point s,e;
Line(){}
Line(Point _s,Point _e){
s=_s;
e=_e;
}
bool operator==(Line v){
return (s==v.s)&&(e==v.e);
}
//根据一个点和倾斜角angle确定直线,0<=angle<pi
Line(Point p,double angle){
s=p;
if(sgn(angle-PI/)==){
e=(s+Point(,));
}
else{
e=(s+Point(,tan(angle)));
}
}
//ax+by+c=0;
Line(double a,double b,double c){
if(sgn(a)==){
s=Point(,-c/b);
e=Point(,-c/b);
}
else if(sgn(b)==){
s=Point(-c/a,);
e=Point(-c/a,);
}
else{
s=Point(,-c/b);
e=Point(,(-c-a)/b);
}
}
void input(){
s.input();
e.input();
}
void adjust(){
if(e<s) swap(s,e);
}
//求线段长度
double length(){
return s.distance(e);
}
//返回直线倾斜角 0<=angle<pi
double angle(){
double k=atan2(e.y-s.y,e.x-s.x);
if(sgn(k)<) k+=PI;
if(sgn(k-PI)==) k-=PI;
return k;
}
//点和直线的关系
//1 在左侧
//2 在右侧
//3 在直线上
int relation(Point p){
int c=sgn((p-s)^(e-s));
if(c<) return ;
else if(c>) return ;
else return ;
}
//点在线段上的判断
bool pointonseg(Point p){
return sgn((p-s)^(e-s))==&&sgn((p-s)*(p-e))<=;
}
//两向量平行(对应直线平行或重合)
bool parallel(Line v){
return sgn((e-s)^(v.e-v.s))==;
}
//两线段相交判断
//2 规范相交
//1 非规范相交
//0 不相交
int segcrossseg(Line v){
int d1=sgn((e-s)^(v.s-s));
int d2=sgn((e-s)^(v.e-s));
int d3=sgn((v.e-v.s)^(s-v.s));
int d4=sgn((v.e-v.s)^(e-v.s));
if((d1^d2)==-&&(d3^d4)==-) return ;
return (d1==&&sgn((v.s-s)*(v.s-e))<=||
d2==&&sgn((v.e-s)*(v.e-e))<=||
d3==&&sgn((s-v.s)*(s-v.e))<=||
d4==&&sgn((e-v.s)*(e-v.e))<=);
}
//直线和线段相交判断
//-*this line -v seg
//2 规范相交
//1 非规范相交
//0 不相交
int linecrossseg(Line v){
int d1=sgn((e-s)^(v.s-s));
int d2=sgn((e-s)^(v.e-s));
if((d1^d2)==-) return ;
return (d1==||d2==);
}
//两直线关系
//0 平行
//1 重合
//2 相交
int linecrossline(Line v){
if((*this).parallel(v))
return v.relation(s)==;
return ;
}
//求两直线的交点
//要保证两直线不平行或重合
Point crosspoint(Line v){
double a1=(v.e-v.s)^(s-v.s);
double a2=(v.e-v.s)^(e-v.s);
return Point((s.x*a2-e.x*a1)/(a2-a1),(s.y*a2-e.y*a1)/(a2-a1));
}
//点到直线的距离
double dispointtoline(Point p){
return fabs((p-s)^(e-s))/length();
}
//点到线段的距离
double dispointtoseg(Point p){
if(sgn((p-s)*(e-s))<||sgn((p-e)*(s-e))<)
return min(p.distance(s),p.distance(e));
return dispointtoline(p);
}
//返回线段到线段的距离
//前提是两线段不相交,相交距离就是0了
double dissegtoseg(Line v){
return min(min(dispointtoseg(v.s),dispointtoseg(v.e)),min(v.dispointtoseg(s),v.dispointtoseg(e)));
}
//返回点P在直线上的投影
Point lineprog(Point p){
return s+(((e-s)*((e-s)*(p-s)))/((e-s).len2()));
}
//返回点P关于直线的对称点
Point symmetrypoint(Point p){
Point q=lineprog(p);
return Point(*q.x-p.x,*q.y-p.y);
}
}; Line L[];
int book[];
int n; bool Check(Line a,Line b){
if(sgn((a.s-a.e)^(b.s-a.e))*sgn((a.s-a.e)^(b.e-a.e))>) return false;
if(sgn((b.s-b.e)^(a.s-b.e))*sgn((b.s-b.e)^(a.e-b.e))>) return false;
if(sgn(max(a.s.x,a.e.x)-min(b.s.x,b.e.x))>=&&sgn(max(b.s.x,b.e.x)-min(a.s.x,a.e.x))>=
&&sgn(max(a.s.y,a.e.y)-min(b.s.y,b.e.y))>=&&sgn(max(b.s.y,b.e.y)-min(a.s.y,a.e.y))>=)
return true;
else return false;
} Point p[];
int pos; double dist(Point a,Point b){
return (b-a)*(b-a);
} bool cmp(Point a,Point b){
double tmp=(a-p[pos])^(b-p[pos]);
if(sgn(tmp)>){
return true;
}
else if(sgn(tmp)<){
return false;
}
else return dist(p[pos],a)<dist(p[pos],b);
} int main(){
int T;
std::ios::sync_with_stdio(false);
cin>>T;
while(T--){
int n;
cin>>n;
pos=;
for(int i=;i<=n;i++){
cin>>p[i].pos>>p[i].x>>p[i].y;
}
Point tmp=p[];
int pp=;
for(int i=;i<=n;i++){
if((p[i].y<tmp.y)||(p[i].y==tmp.y&&p[i].x<tmp.x)){
tmp=p[i];
pp=i;
}
}
swap(p[pp],p[]);
vector<int>ve;
ve.push_back(p[].pos);
for(int i=;i<n;i++){
sort(p+pos,p+n+,cmp);
pos++;
ve.push_back(p[pos].pos);
}
cout<<n;
for(int i=;i<ve.size();i++){
cout<<" "<<ve[i];
}
cout<<endl;
}
return ;
}
Space Ant(极角排序)的更多相关文章
- poj 1696 Space Ant 极角排序
#include<cstdio> #include<cstring> #include<cmath> #include<iostream> #inclu ...
- POJ 1696 Space Ant 极角排序(叉积的应用)
题目大意:给出n个点的编号和坐标,按逆时针方向连接着n个点,按连接的先后顺序输出每个点的编号. 题目思路:Cross(a,b)表示a,b的叉积,若小于0:a在b的逆时针方向,若大于0a在b的顺时针方向 ...
- Space Ant--poj1696(极角排序)
http://poj.org/problem?id=1696 极角排序是就是字面上的意思 按照极角排序 题目大意:平面上有n个点然后有一只蚂蚁他只能沿着点向左走 求最多能做多少点 分析: 其实 ...
- poj 1696 Space Ant (极角排序)
链接:http://poj.org/problem?id=1696 Space Ant Time Limit: 1000MS Memory Limit: 10000K Total Submissi ...
- POJ 1696 Space Ant(极角排序)
Space Ant Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 2489 Accepted: 1567 Descrip ...
- poj 1696:Space Ant(计算几何,凸包变种,极角排序)
Space Ant Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 2876 Accepted: 1839 Descrip ...
- POJ 1696 Space Ant 【极角排序】
题意:平面上有n个点,一只蚂蚁从最左下角的点出发,只能往逆时针方向走,走过的路线不能交叉,问最多能经过多少个点. 思路:每次都尽量往最外边走,每选取一个点后对剩余的点进行极角排序.(n个点必定能走完, ...
- Space Ant---poj1696(极角排序)
题目链接:http://poj.org/problem?id=1696 题意:给你n个点,然后我们用一条线把它们连起来,形成螺旋状: 首先找到左下方的一个点作为起点,然后以它为原点进行极角排序,找到极 ...
- poj 1696 极角排序求最长逆时针螺旋线
Space Ant Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 4970 Accepted: 3100 Descrip ...
随机推荐
- binlog之四:mysql中binlog_format模式与配置详解,binlog的日志格式详解
mysql复制主要有三种方式:基于SQL语句的复制(statement-based replication, SBR),基于行的复制(row-based replication, RBR),混合模式复 ...
- mysql 不同事务隔离级别
repeatable read 在同一事务中,同一查询多次进行时候,由于其他插入操作(insert)的事务提交,导致每次返回不同的结果集. 标准的repeatable read是允许幻读的,因为这一级 ...
- CentOS命令行性能检测工具
一.uptime Uptime命令的显示结果包括服务器已经运行了多长时间,有多少登陆用户和对服务器性能的总体评估(load average).load average值分别记录了上个1分钟,5分钟和1 ...
- .Net2.0部署在IIS8.5上的问题
请求的内容似乎是脚本,因而将无法由静态文件处理程序来处理. 到"应用程序池"里找网站对应的应用程序池(右击网站-> 高级设置),双击程序池, 看程序池是否也网站的net ...
- css sprite实例
css sprite直译过来就是CSS精灵.通常被解释为“CSS图像拼合”或“CSS贴图定位”.本文章向码农们介绍css sprite使用方法和基本使用实例,需要的码农可以参考一下. 一.什么是css ...
- Linux系统下MongoDB的简单安装与基本操作
这篇文章主要介绍了Linux系统下MongoDB的简单安装与基本操作,需要的朋友可以参考下 Mongo DB ,是目前在IT行业非常流行的一种非关系型数据库(NoSql),其灵活的数据存储方式,备 ...
- WGCNA 分析
https://www.jianshu.com/p/f80de3468c04 https://mp.weixin.qq.com/s/-DthUKY2RTY6vxtxapzLkw https://www ...
- HTML5 Canvas ( 创建图形对象 ) createImageData
<!DOCTYPE html> <html> <head> <meta charset="UTF-8"> <title> ...
- git提交到远程仓库
Git概述 什么是Git? 刚开始对这个东西也感到挺迷茫,并且问了好多已经学习android一段时间的同学也是一头雾水,直到了解并使用之后,才体会到Git的好处以及重要意义. Git:是目前世界上最先 ...
- XMLTransformProvider
XMLTransformProvider1 XMLTransformProvider1.TransformRead.SourceXmlDocument := XMLDoc.GetDOMDocument ...