ROS学习笔记8-rqt_console和roslaunch
本教程来自于:http://wiki.ros.org/ROS/Tutorials/UsingRqtconsoleRoslaunch
rqt_console 和 rqt_logger_level 是ros的调试工具(类似于控制台和日志)。roslaunch可以用于一次启动多个节点(不同于rosrun只能启动一个节点)。
- 使用rqt_console和rqt_logger_level
假设安装了ros和rqt工具,以及小乌龟的示例包。rqt_console控制台将ros的日志系统关联到节点的显示输出,rqt_logger_level允许我们在节点运行期间改变他们的信息显示级别。
信息显示级别包括:DEBUG(调试信息), WARN(警告信息), INFO(提示信息), 和ERROR(错误信息)。
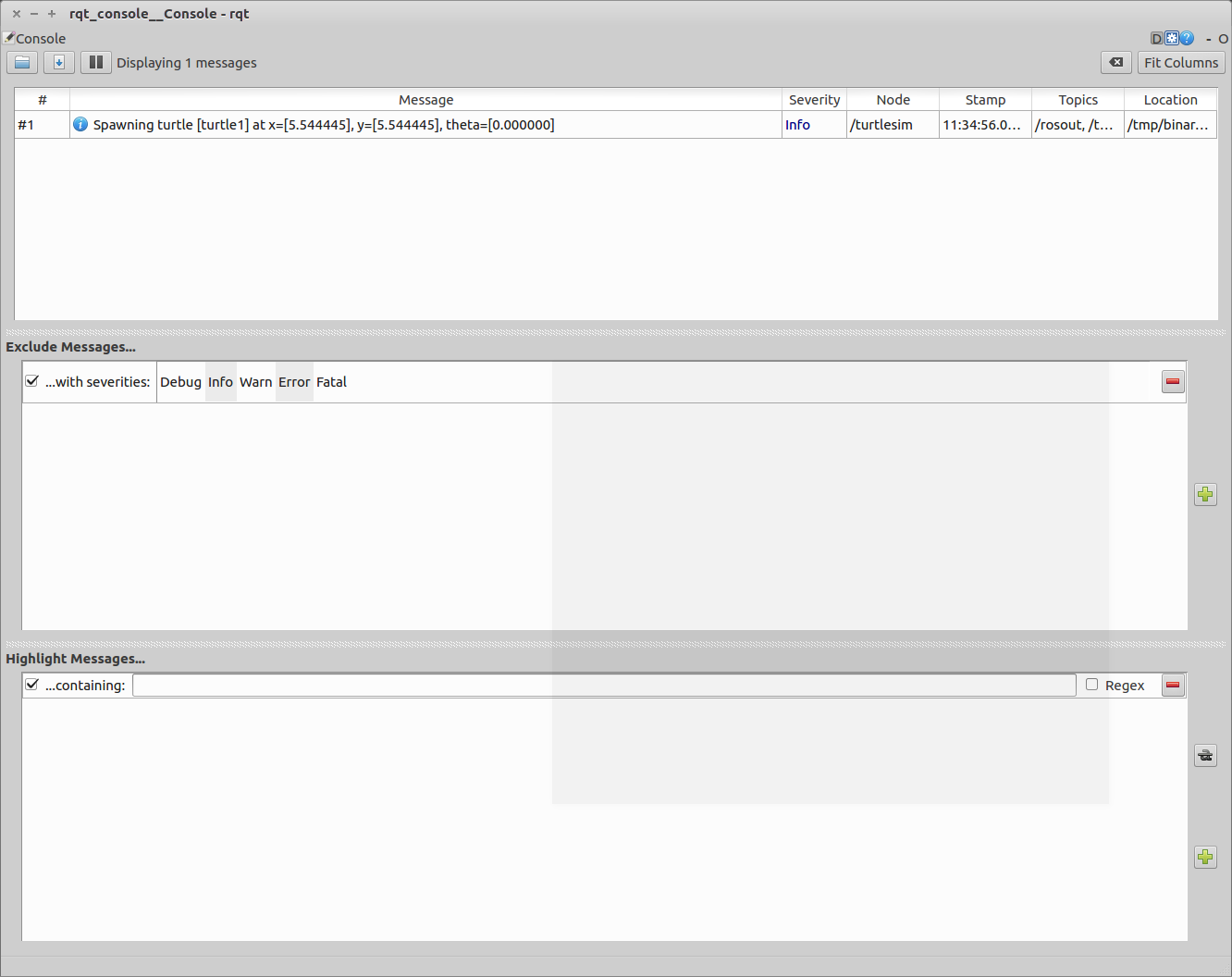
在运行小乌龟的示例之前,在两个新的终端中分别运行如下语句,打开rqt_console和rqt_logger_level的界面:$ rosrun rqt_console rqt_console
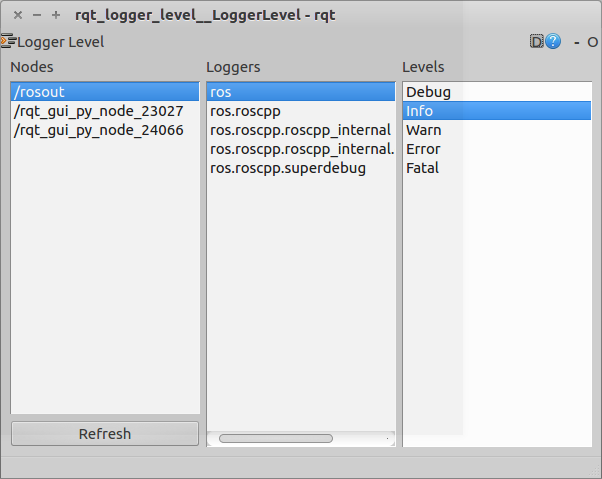
$ rosrun rqt_logger_level rqt_logger_levelrqt_console界面

rqt_logger_level界面
现在我们在一个新终端中运行小乌龟的示例:
$ rosrun turtlesim turtlesim_node
则控制台中会出来如下信息:
然后我们可以在rqt_logger_level中改变信息级别。
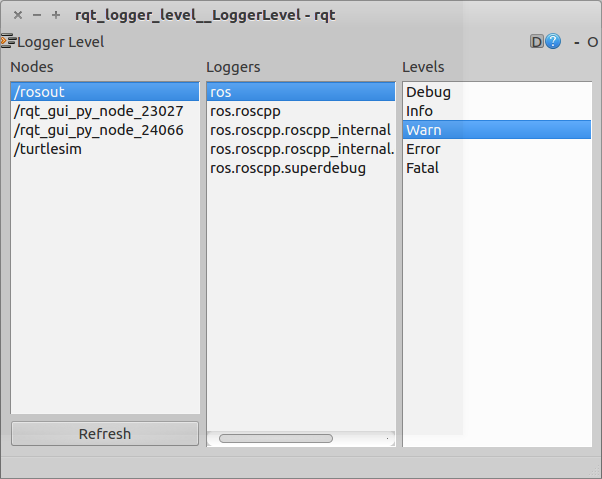
将显示级别改为Warning,然后运行如下命令,让乌龟撞墙:
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}'然后我们再看rqt_console中的信息:

可以看出显示出了警告信息。
所有的日志级别如下:
Fatal
Error
Warn
Info
Debug其中,Debug是最低级别,Fatal是最高级别,选择一个级别后,会显示选择级别以及比他低的级别。例如,选择Warn后,会显示Debug、Info和Warn级别的信息。
roslaunch
roslaunch 通过一个启动文件来启动节点
用法如下:$ roslaunch [package] [filename.launch]
使用如下命令进入一个ros包,该例中进入beginner_tutorials
$ roscd beginner_tutorials
如果提示没有该包,参考文档创建一个ros包。运行如下命令,建立ros的环境。
$ cd ~/catkin_ws
$ source devel/setup.bash
$ roscd beginner_tutorials然后使用如下命令创建一个启动文件目录:
$ mkdir launch
$ cd launch事实上,不用单独建立个目录来存储启动文件,启动文件可以存放在包目录下的任何位置,ros会自动寻找他,不过为便于文件组织,还是单独创建一个目录比较好。
然后创建一个启动文件,文件名为:turtlemimic.launch,内容如下:
<launch> <group ns="turtlesim1">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group> <group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group> <node pkg="turtlesim" name="mimic" type="mimic">
<remap from="input" to="turtlesim1/turtle1"/>
<remap from="output" to="turtlesim2/turtle1"/>
</node> </launch>从启动文件的标签可以看出,该文件采用的xml语法,有两个group和一个node,其中,两个group都有一个ns的标签指定命名空间(namespace)为turtlesim1和turtlesim2,两个group中各有一个node,node的名字(name)为sim。这样可以让我们同时启动两个仿真器而没有命名冲突。然后,我们定义了一个模拟(mimic)节点,该节点有输入输出主题,输入和输出分别被重映射到turtlesim1 和 turtlesim2,该重命名会让turtlesim2模拟turtlesim1(将turtlesim1的输出直接给turtlesim2)。
然后我们采用roslaunch来启动该文件。$ roslaunch beginner_tutorials turtlemimic.launch
输出如下:
started roslaunch server http://UAVlab1:36470/ SUMMARY
======== PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.14 NODES
/
mimic (turtlesim/mimic)
/turtlesim1/
sim (turtlesim/turtlesim_node)
/turtlesim2/
sim (turtlesim/turtlesim_node) ROS_MASTER_URI=http://localhost:11311 process[turtlesim1/sim-1]: started with pid [4107]
process[turtlesim2/sim-2]: started with pid [4108]
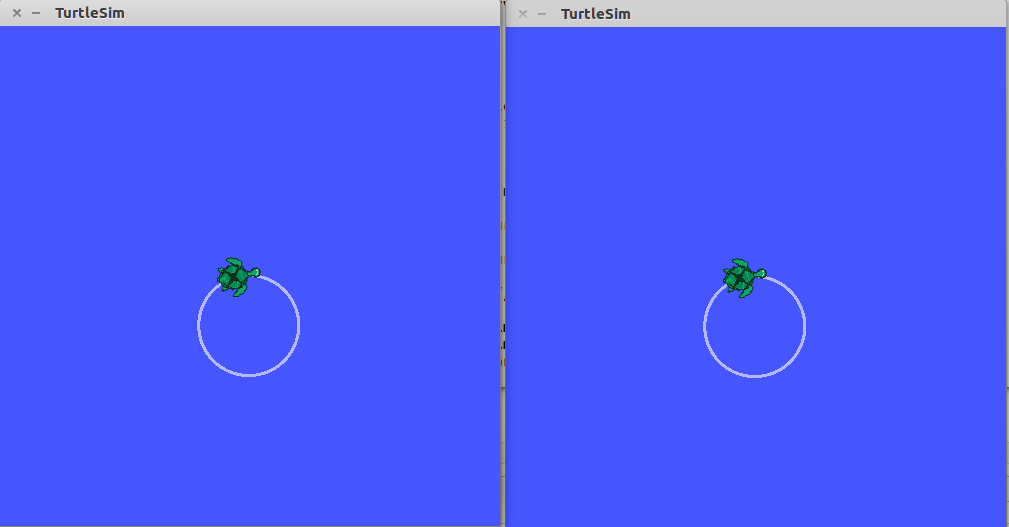
process[mimic-3]: started with pid [4109]可以看出来,运行了三个节点,分别为/mimic,/turtlesim1/sim和/turtlesim2/sim。
并出现了两个小乌龟:
我们再启动一个新终端,在其中发布消息让turtlesim1中的乌龟开始移动:
$ rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
可以看出来两个窗口里的小乌龟都开始移动:
可以看出来其中的消息传递:

/mimic节点起到了消息转发的作用。
ROS学习笔记8-rqt_console和roslaunch的更多相关文章
- ROS学习笔记(二) :使用roslaunch
目录 roslaunch roslaunch的使用 以turtlesim为例 roslaunch roslaunch是ros自带的一个库,使用roslaunch可以同时运行多个节点,通过编写launc ...
- ROS学习笔记七:在ROS中使用USB摄像头
下面是一些USB摄像头的驱动(大多数摄像头都支持uvc标准): 1 使用软件库里的uvc-camera功能包 1.1 检查摄像头 lsusb ----------------------------- ...
- ROS学习笔记八:基于Qt搭建ROS开发环境
1 前言 本文介绍一种Qt下进行ROS开发的完美方案,使用的是ros-industrial的Levi-Armstrong在2015年12月开发的一个Qt插件ros_qtc_plugin,这个插件使得Q ...
- ROS学习笔记1-引言
该学习笔记参考ROS官方wiki的内容,见:http://wiki.ros.org/ROS/Introduction 什么是ROSROS的全称是Robot Operating System,即机器人操 ...
- ROS学习笔记
创建ros工作环境: mkdir -p ~/catkin_ws/src //建立项目目录,同时生成src文件夹 cd ~/catkin_ws/ //进入项目目录 catkin_make //编译项目, ...
- ROS学习笔记十二:使用gazebo在ROS中仿真
想要在ROS系统中对我们的机器人进行仿真,需要使用gazebo. gazebo是一种适用于复杂室内多机器人和室外环境的仿真环境.它能够在三维环境中对多个机器人.传感器及物体进行仿真,产生实际传感器反馈 ...
- ROS学习笔记(二)
===================================================== QT工具箱sudo apt-get install ros-kinetic-rqtsudo ...
- ros学习笔记 - 深度传感器转换成激光数据(hector_slam)
前提条件:1,确保读者已经安装了kinect或者其他深度摄像头的驱动,如果未安装,可以直接在网盘下载:http://pan.baidu.com/s/1hqHB10w 提取密码:wrmn 利用深度相机仿 ...
- ROS学习笔记(一) : 入门之基本概念
目录 基本概念 1. Package 2. Repositories 3. Computation Graph 4. Node 5. Master 6. Message 7. Topic 8. Ser ...
随机推荐
- 正则表达式regex回溯分析
正则表达式的回溯 现在我们来正式认识一下回溯.以字符串“abbc”为例,正则表达式为“ab{1,3}c”,再匹配的时候,a.b.b,匹配完成,这时候,正则表达式会继续用c和b进行比较,发现不符合,这时 ...
- K8S的安装
两种方式安装k8s: 传统方式,使用二进制. 优点:能够让我们更清楚k8s的组件关系,可扩展性强,可定制化 缺点:不利于新手部署 使用kubeadm安装 优点:简单,高效 缺点:所有的事情都被kude ...
- pom.xml文件中properties有什么用
properties标签的作用: 在标签内可以把版本号作为变量进行声明,后面dependency中用到版本号时可以用${变量名}的形式代替,这样做的好处是:当版本号发生改变时,只有更新properti ...
- Vue——前端生成二维码
与后端生成二维码相比,前端生成二维码更具有灵活性,下面就介绍两种前端生成二维码的方式,两种方式相比之下,vue-qr比qrcode多了一个再中间添加logo的功能. 方式一:qrcode npm np ...
- STM的低功耗系列
STM32L0的2个新增外设:一是集成了晶振的USB,第二高精度的12位或16位ADC: 特色外设LUART:传统的MCU当CPU睡眠,进入低功耗模式下,外设是关闭的,因为时钟是关闭的,而意法半导体的 ...
- org.springframework.data.redis.RedisConnectionFailureException
org.springframework.data.redis.RedisConnectionFailureException: Cannot get Jedis connection; nested ...
- windows网络编程-C语言实现简单的TCP协议聊天
TCP/IP协议(面向连接协议)类似于打电话时,对方一定在手机附近并且此刻都在和对方进行通话.一定保证双方都在线,才能进行数据传输.UDP/IP协议(无连接协议)就像邮箱,不保证对方一定在等你邮件且对 ...
- ie使用已安装的最高版本ie代码,及ie下不要在结尾处写多余的逗号“,”
ie使用已安装的最高版本ie代码 <meta http-equiv = "X-UA-Compatible" content = "IE=7,IE=9" & ...
- spring aop @after和@before之类的注解,怎么指定多个切点
有如下两个切点: @Pointcut("execution(public * com.wyh.data.controller.DepartmentController.*(..))" ...
- Python经典排序算法
https://www.cnblogs.com/onepixel/p/7674659.html这个文章很nice https://www.bilibili.com/video/av685670?fro ...