自动驾驶运动规划-Dubins曲线
1、Simple Car模型
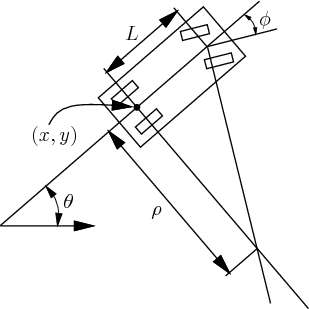
如下图所示,Simple Car模型是一个表达车辆运动的简易模型。Simple Car模型将车辆看做平面上的刚体运动,刚体的原点位于车辆后轮的中心;x轴沿着车辆主轴方向,与车辆运动方向相同;车辆在任意一个时刻的姿态可以表述为(x, y, )。车辆的运动速度为s;方向盘的转角为
,它与前轮的转角相同;前轮和后轮中心的距离为L;如果方向角的转角固定,车辆会在原地转圈,转圈的半径为
。
在一个很短的时间内,可以认为车辆沿着后轮指向的方向前进,当
趋于0时,有:
根据数学定义:
将2) 和3)代入1)中,得到:
显然,和
是5)式的一个解,两侧乘以速度s等式仍然满足。因此有:
用表示车辆前进的距离,则有:
根据三角几何,有:
将9)式代入8)式,得到:
8)式两侧同除以dt, 并根据,得到:
至此得到了车辆的运动模型(Motion Model)。
然后引入Action变量,假设车辆运动速度s和方向盘转角由Action变量
和
指定,得到:
2、Dubins曲线
假设车辆按照常量速度运行: ,最大转向角度为
,最小转弯半径
,起点为
, 终点为
,我们目标是求解从起
点到终点
的最短行驶距离。求解最短距离的过程就是优化如下Cost的过程。
是到达
所需的时间,
,当
不可达时,
。
由于速度是恒定的,根据前面提到的车辆的运动模型:
其中:。将13)和14)代入12),可看到,最短行驶距离只与时间
有关。
令S为车辆直行的Motion Primitive,L和R分别为车辆左转和右转的Motion Primitive,可以证明,任意起点到终点的Dubins最短路径可以由不超过三个Motion Primitives构成。由三个Motion Primitives构成的序列称为一个Word。由于两个连续的、相同的Motion Primitive可以合并为一个Motion Primitive,因此所有可能的Word有10中组合,Dubins证明最优的Word组合只能是如下6个组合之一:
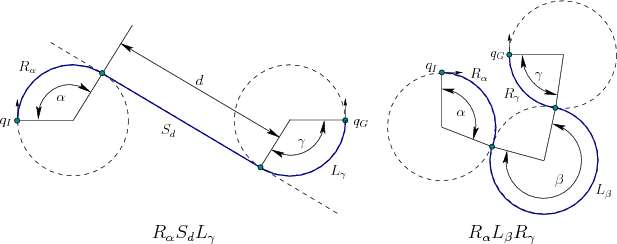
其中,,
,这里注意,
大于
,如果小于
,一定有其它的序列优于该序列。
3、Dubins计算过程推导
3.1 基于向量的切点计算
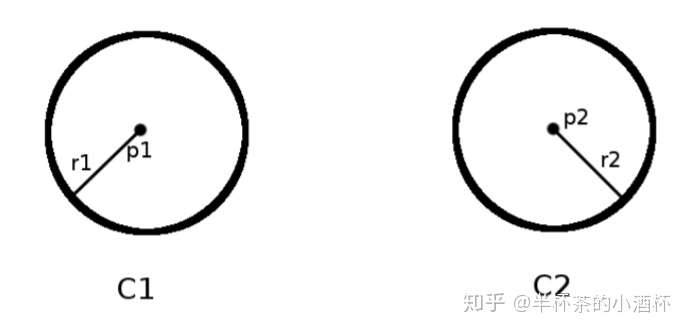
假设两个最小转弯半径构成的Circle为 和
,半径分别为
和
,圆心分别为
和
。
1)首先构造C1和C2的圆心到
的向量
。
2)构造C1和C2的外切线切点构成的向量。
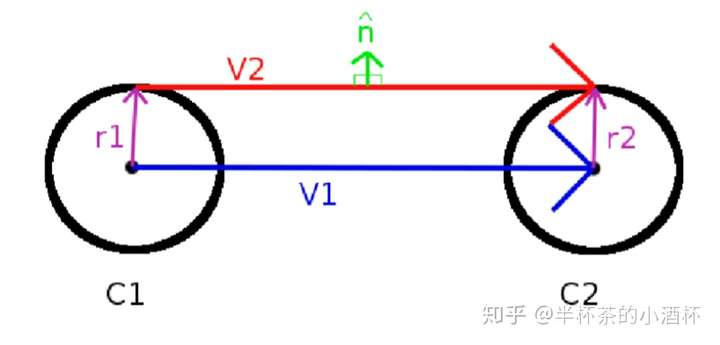
3)构造垂直于的单位法向量n,修改
的使其平行于
。
根据法向量的定义:,得到:
根据单位向量的定义:,代入上式得到:
- 16)式两侧同除以D,得到:
注意,这里实际是将向量
单位化。
根据向量点乘的数学定义:
因此:
等于向量
与法向量n的夹角的余弦。为了方便书写,定义一个常量
。
等式17)中只有n是未知数。
5)将向量旋转角度C就得到向量n。假设
,根据向量旋转的数学定义:
6)计算出n之后,就可以很方便的计算出外切线的切点和
。从C1的圆心出发,沿着向量n的方向,距离为
的位置即为切点
,
亦然。
3.2 计算CSC类型的行驶曲线
RSR、LSL、RSL、LSR是CSC类型的行驶曲线,该类型曲线首先计算两个圆的切点,然后车辆沿着最小转弯半径构成的圆周行驶到第一个圆的切点,然后直行到第二个圆的切点,再沿着最小转弯半径构成的圆周行驶到目的地。下面我们以RSR轨迹为例看看如何计算行驶曲线。
假设起点和终点
,最小转弯半径为
。然后我们计算起点和终点的圆心。
起点的圆心为:
终点的圆心为:
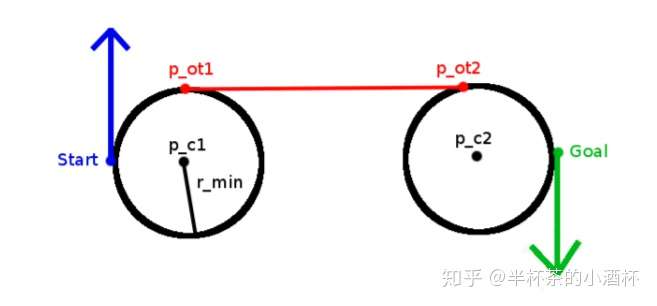
得到起点和终点的圆心之后,可以利用3.1小节的切点计算方法,得到切点和
。然后就可以得到车辆的行驶轨迹,该轨迹分为三段:start到
的圆周弧;
和
的直线距离;
到Goal的圆周弧。至此我们得到了RSR的行驶曲线。
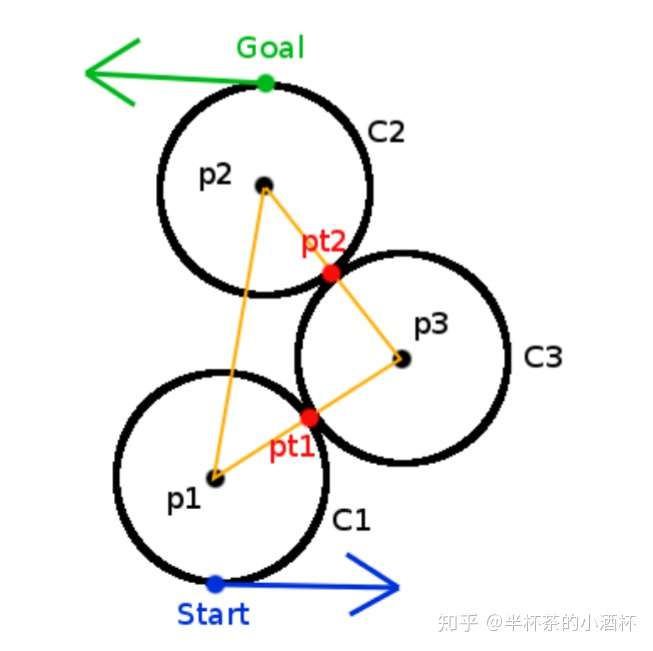
3.3 计算CCC类型的行驶曲线
如下图所示,和
的圆心为
和
,
是与
和
相切的圆,圆心为
。
根据数学关系,可得到:
记为
与
的夹角,已知三角形的三个边的长度,根据余弦定理,有:
最终可得到:
注意此处为LRL模式时,需要加上
;为RLR模式时,
需要减去
。
然后计算和计算
就变得很容易。定义向量
,将向量缩放到
。
最后可以得到交点。按照同样的过程可以计算得到
。然后就可以得到start到
的圆周弧;
和
的圆周弧;
到Goal的圆周弧的三段轨迹组成的行驶曲线。
参考文章
1、A Comprehensive, Step-by-Step Tutorial on Computing Dubin’s Curves (https://gieseanw.files.wordpress.com/2012/10/dubins.pdf)
2、Planning Algorithm (http://planning.cs.uiuc.edu/node1.html)
转自:https://zhuanlan.zhihu.com/p/120272035
自动驾驶运动规划-Dubins曲线的更多相关文章
- 自动驾驶运动规划-Reeds Shepp曲线
自动驾驶运动规划-Reeds Shepp曲线 相比于Dubins Car只允许车辆向前运动,Reeds Shepp Car既允许车辆向前运动,也允许车辆向后运动. Reeds Shepp Car运动规 ...
- Google Waymo 2017自动驾驶安全技术报告(一)
2017年10月Google Waymo向美国交通部提交了一份43页的安全报告,报告中详细说明了Waymo如何装备和训练自动驾驶车辆,从而避免驾驶中的一般和意外情况发生.这份报告对Waymo的自动驾驶 ...
- zz自动驾驶中轨迹规划的探索和挑战
大家好,今天我们主要介绍一下轨迹规划的探索和挑战,我主要从四个方面介绍: 轨迹规划的概念 决策 横向规划 纵向规划 轨迹规划的概念: 轨迹规划的核心就是要解决车辆该怎么走的问题.比如我们知道了附近有行 ...
- <转载> 从算法上解读自动驾驶是如何实现的?
科技新闻小鹏汽车2016-03-28 10:42 [摘要]车辆路径规划问题中路网模型.路径规划算法和交通信息的智能预测为关键点. 由于驾驶员的驾驶工作繁重,同时随着汽车拥有量的增加,非职业驾驶员的数 ...
- 自动驾驶缺人才?听听David Silver怎么说!
如今自动驾驶在全球范围内的发展势头愈发“凶猛”,该领域人才也一度被视为“香饽饽”. 即使在美国,自动驾驶工程师的起薪也已经突破了25万美元,我国‘“开价”之高更是令人咋舌. 人才.人才.还是人才!重要 ...
- zz自动驾驶复杂环境下高精度定位技术
今天为大家分享下,自动驾驶在复杂环境下的高精度定位技术. 定位/导航负责实时提供载体的运动信息,包括载体的:位置.速度.姿态.加速度.角速度等信息. 自动驾驶对定位系统的基本要求: 1. 高精度:达到 ...
- zz高精地图和定位在自动驾驶的应用
本次分享聚焦于高精地图在自动驾驶中的应用,主要分为以下两部分: 1. 高精地图 High Definition Map 拓扑地图 Topological Map / Road Graph 3D栅格地图 ...
- Reeds-Shepp曲线和Dubins曲线
转载:https://www.cnblogs.com/huyanan/articles/6243694.html 什么是Reeds-Shepp曲线? 想象你下班开车回家,到了小区后想把车停 ...
- 第三期 第三期 搜索——1.运动规划(motion_planing)
运动规划的根本问题在于机器人可能存在于一个这样的世界中, 它可能想找到一条到达这个目标的路径,那么就需要指定一个到达那里的计划, 自动驾驶汽车也会遇到这个问题.他可能处于高速公路的附近的街道网络中,他 ...
随机推荐
- Linux经典100题及参考答案
转至:https://blog.csdn.net/yaoqiang2011/article/details/11908189 一.单选题 1. cron 后台常驻程序 (daemon) 用于: A. ...
- POJ2112题解
题目大意:K个挤奶机,C头牛,每个挤奶机最多可以接待M头牛,各个K,C之间可能有道路连接,要让每个牛都找到挤奶机,求最小的走的路程最远的牛所需走的距离. 思路:首先看到要最小化最大值,所以需要二分.可 ...
- docker:打包node+npm+pm2运行环境镜像
最近公司有一个外包项目需要在不能连外网的情况下部署node项目到甲方公司内部.直接使用node官网的安装包可以获得node运行环境,但像pm2这种工具要离线装就会比较费劲,所以最终选择了使用docke ...
- Python第三讲
今日内容概要 数据类型及内置方法 字符编码 文件处理 函数简介 今日内容详细 数据类型及内置方法 列表 name_list =['jason','oscar','tony','kevin'] 1.索引 ...
- WPF优秀组件推荐之LiveCharts
概述 LiveCharts是一个比较漂亮的WPF图表控件,在数据变化时还会有动画切换的效果,并且样式也可以控制. 官方网站:Live Charts (lvcharts.net) 开源代码:GitHub ...
- 从零开始Pytorch-YOLOv3【笔记】(一)配置文件解读
前言 这是github上的一个项目YOLO_v3_tutorial_from_scratch,它还有相应的blog对其详细的解读.机器之心翻译了他的tutorial:从零开始PyTorch项目:YOL ...
- laravel7 搜索关键字标红及手机号,身份证号隐藏
控制器代码 public function index(Request $request) { //接受搜索关键字 $word = $request->get('name'); $start = ...
- tp5 Redis缓冲的设置与清除
控制器代码: //设置缓冲的方法 public function order() { $word = input('word');//接受搜索值 //题意:将订单数据使用redis进行缓存中,第二次读 ...
- CF1327F题解
首先第一步,位运算拆位.变为一个区间的 \(And\) 为 \(0\) 或 \(1\). 如果 \(And\) 为 \(1\),那么所有数都需要为 \(1\),否则为 \(0\). 我们把所有可能为 ...
- atoi atof atol
在c语言中提供了把字符串转化为整数的函数,并没有提供把整数转化为字符串的函数 atoi是标准的库函数 itoa不是标准的库函数(在vs可编译,其它系统中未知) atol把一个字符串转化为long类型 ...