第三期 第三期 搜索——1.运动规划(motion_planing)
运动规划的根本问题在于机器人可能存在于一个这样的世界中,
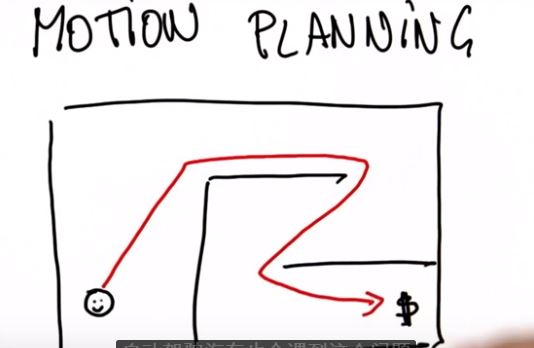
它可能想找到一条到达这个目标的路径,那么就需要指定一个到达那里的计划,
自动驾驶汽车也会遇到这个问题。他可能处于高速公路的附近的街道网络中,他必须要找到他的路径并导航到目标位置。
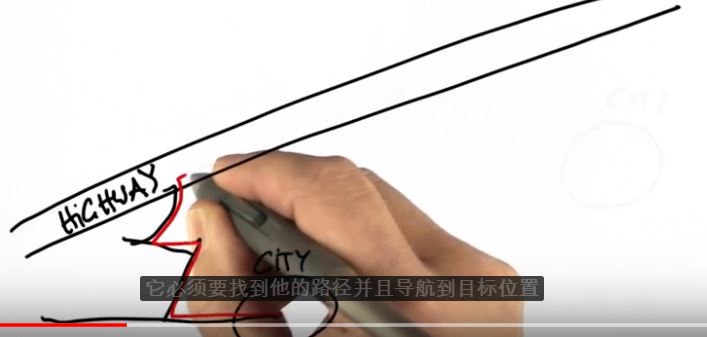
如果我们放大并且看看这个十字路口,这是我们渲染出来的最好的街道线环境。

从start出发顺着箭头直行,右转,直行,到达十字路口,现在在这里变换车道是一个冒险的方案
因为左边车道有一辆大卡车占道,一个可行的方案是在十字路直行绕着这个街区走。
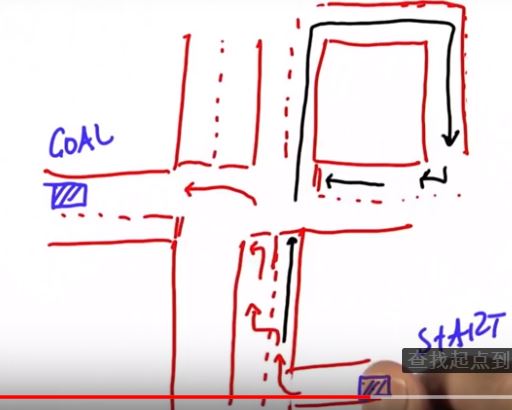
然后直道走到目标位置,查找起到到终点路径的过程称为规划,对机器人而言,常称为机器人运动规划,
今天我们将谈谈关于规划的离散方法。在哪里世界是分割成小块的。下一节课我们将谈谈使用这些方法
进行连续运动。
什么是规划问题?我们有一个世界地图,我们有一个起点和一个终点,通常我们会得到一种成本函数,
考虑成本的最简单方式是按照莫个路线行驶需要消耗的时间,我们的目标是找到最小成本路径。

第三期 第三期 搜索——1.运动规划(motion_planing)的更多相关文章
- 如何用MoveIt快速搭建机器人运动规划平台?
MoveIt = RobotGo,翻译成中文就是“机器人,走你!”所以,MoveIt的主要就是一款致力于让机器人能够自主运动及其相关技术的软件,它的所有模块都是围绕着运动规划的实现而设计的. 两个月前 ...
- Grassfire算法- 运动规划(Motion planning)
Grassfire算法: 一.概念 这个算法是做图像处理的抽骨架处理,目的是求出图像的骨架,可以想象一片与物体形状相同的草,沿其外围各点同时点火.当火势向内蔓延,向前推进的火线相遇处各点的轨迹就是中 ...
- 运动规划 (Motion Planning): MoveIt! 与 OMPL
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 【2018.04.19 ROS机器人操作系统】机器人控制:运动规划、路径规划及轨迹规划简介之一
参考资料及致谢 本文的绝大部分内容转载自以下几篇文章,首先向原作者致谢,希望自己能在这些前辈们的基础上能有所总结提升. 1. 运动规划/路径规划/轨迹规划的联系与区别 https://blog.csd ...
- 机器人运动规划中的构形空间(Configuration Space)
A key concept in motion planning is configuration space, or C-space for short. Every point in the C- ...
- MoveIt运动规划-1
按照帮助文档Setup Assistant Tutorial中的描述,用moveit_setup_assistant图形界面一步步配置机器人,最后生成机器人的配置文件保存到指定的文件夹中. 以UR5机 ...
- 运动规划 (Motion Planning): MoveIt! 与 OMPL---44
原创博文:转载请标明出处:http://www.cnblogs.com/zxouxuewei 最近有不少人询问有关MoveIt!与OMPL相关的话题,但是大部分问题都集中于XXX功能怎么实现,XXX错 ...
- 自动驾驶运动规划-Reeds Shepp曲线
自动驾驶运动规划-Reeds Shepp曲线 相比于Dubins Car只允许车辆向前运动,Reeds Shepp Car既允许车辆向前运动,也允许车辆向后运动. Reeds Shepp Car运动规 ...
- iOS高德地图使用-搜索,路径规划
项目中想加入地图功能,使用高德地图第三方,想要实现确定一个位置,搜索路线并且显示的方法.耗了一番功夫,总算实现了. 效果 WeChat_1462507820.jpeg 一.配置工作 1.申请key 访 ...
随机推荐
- 【python之路16】作业
#!usr/bin/env python # -*- coding:utf-8 -*- # 数据库中原有 old_dict = { "#1": {'hostname': 'c1', ...
- Mysql的CMD操作
一.MySQL登录和退出——在CMD模式操作 l 语法格式:mysql.exe –h主机名 –u用户名 –p密码 l 参数说明: mysql.exe是mysql服务器的主应用程序. -h代 ...
- new操作符实现过程
var obj = new Object(); //创建新对象 一. new是干嘛的? new操作符用来生成一个新的对象, 它后面必须跟上一个函数(否则, 会抛出TypeError异常), 这个函数就 ...
- Laravel 中 offset,limit 或 skip , take 的使用
laravel 本身有一个自带的快速分页方法 paginate,只需要传入每页显示多少条数据就可以 了,但是如果想使用自定义从哪里开始呢. 一.offset,limit (offset 设置从哪里开始 ...
- C++学习笔记----2.4 C++对象的内存模型
转载自:http://c.biancheng.NET/cpp/biancheng/view/2995.html点击打开链接 当对象被创建时,编译器会为每个对象分配内存空间,包括成员变量和成员函数. 直 ...
- Python高级核心技术97讲 系列教程
Python高级核心技术97讲 系列教程 整个课程都看完了,这个课程的分享可以往下看,下面有链接,之前做java开发也做了一些年头,也分享下自己看这个视频的感受,单论单个知识点课程本身没问题,大家看的 ...
- Codeforces 436C
题目链接 C. Dungeons and Candies time limit per test 2 seconds memory limit per test 256 megabytes input ...
- 工信部<<大数据产业发展规划>>
大数据产业发展规划 (2016-2020年) 发布时间:2017-01-17 来源:规划司 数据是国家基础性战略资源,是21世纪的“钻石矿”.党中央.国务院高度重视大数据在经济社会发展中的作用,党的 ...
- linuxtoy.org资源
https://linuxtoy.org/archives.html Archives 在 Android 系统上安装 Debian Linux 与 R (2015-07-14) Pinos:实现摄像 ...
- python中sort排序
排序并且改变自身结果: nums.sort()