无人驾驶——对frenet坐标的理解
好的确定车和路之间的关系,我们通常将车辆的在大地坐标坐标转化为车辆和道路之间的frenet坐标。
可能有人会疑问为什么转换后就方便了呢?我们来看一个例子。
在大地坐标下:
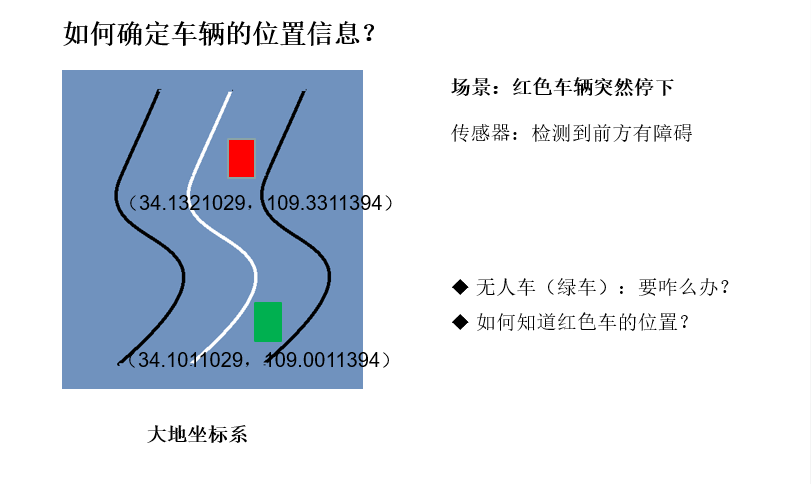
无人车首先要知道红色车的位置。通过传感器得到目标在车辆坐标系下的坐标,车辆的笛卡尔坐标系下坐标可以由惯导得到,可以推出目标在笛卡尔坐标下的位置信息,然后再和道路坐标比较,判断红色车辆在哪条车道内。
在frenet坐标下:
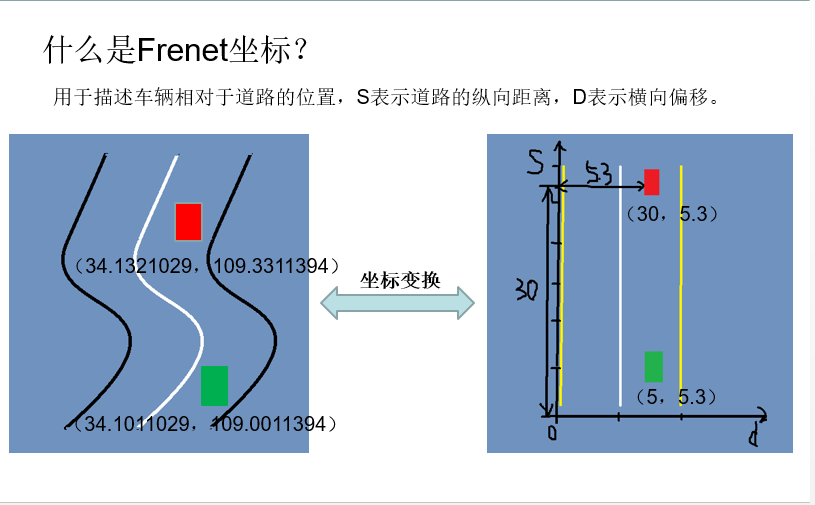
可以看出在frenet坐标下,车相对于道路的位置信息更加清楚。
给出笛卡尔坐标和frenet坐标相互转换的代码:
vector<double> getFrenet(double x, double y, double theta, vector<double> maps_x, vector<double> maps_y, vector<double> maps_s)
{
int next_wp = NextWaypoint(x,y, theta, maps_x,maps_y);
int prev_wp;
prev_wp = next_wp-;
if(next_wp == )
{
prev_wp = maps_x.size()-;
}
double n_x = maps_x[next_wp]-maps_x[prev_wp];
double n_y = maps_y[next_wp]-maps_y[prev_wp];
double x_x = x - maps_x[prev_wp];
double x_y = y - maps_y[prev_wp];
// find the projection of x onto n
double proj_norm = (x_x*n_x+x_y*n_y)/(n_x*n_x+n_y*n_y);
double proj_x = proj_norm*n_x;
double proj_y = proj_norm*n_y;
double frenet_d = distance(x_x,x_y,proj_x,proj_y);
//see if d value is positive or negative by comparing it to a center point
double center_x = -maps_x[prev_wp];
double center_y = -maps_y[prev_wp];
double centerToPos = distance(center_x,center_y,x_x,x_y);
double centerToRef = distance(center_x,center_y,proj_x,proj_y);
if(centerToPos <= centerToRef)
{
frenet_d *= -;
}
// calculate s value
double frenet_s = maps_s[];
for(int i = ; i < prev_wp; i++)
{
frenet_s += distance(maps_x[i],maps_y[i],maps_x[i+],maps_y[i+]);
}
frenet_s += distance(,,proj_x,proj_y);
return {frenet_s,frenet_d};
} // Transform from Frenet s,d coordinates to Cartesian x,y
vector<double> getXY(double s, double d, vector<double> maps_s, vector<double> maps_x, vector<double> maps_y)
{
int prev_wp = -;
while(s > maps_s[prev_wp+] && (prev_wp < (int)(maps_s.size()-) ))
{
prev_wp++;
}
int wp2 = (prev_wp+)%maps_x.size();
double heading = atan2((maps_y[wp2]-maps_y[prev_wp]),(maps_x[wp2]-maps_x[prev_wp]));
// the x,y,s along the segment
double seg_s = (s-maps_s[prev_wp]);
double seg_x = maps_x[prev_wp]+seg_s*cos(heading);
double seg_y = maps_y[prev_wp]+seg_s*sin(heading);
double perp_heading = heading-pi()/;
double x = seg_x + d*cos(perp_heading);
double y = seg_y + d*sin(perp_heading);
return {x,y};
}int NextWaypoint(double x, double y, double theta, vector<double> maps_x, vector<double> maps_y)
{
int closestWaypoint = ClosestWaypoint(x,y,maps_x,maps_y);
double map_x = maps_x[closestWaypoint];
double map_y = maps_y[closestWaypoint];
double heading = atan2( (map_y-y),(map_x-x) );
double angle = abs(theta-heading);
if(angle > pi()/)
{
closestWaypoint++;
}
return closestWaypoint;
}
想要源代码的朋友可以在评论区留下联系方式。
无人驾驶——对frenet坐标的理解的更多相关文章
- 第三期 预测——Frenet 坐标
Frenet坐标 在讨论过程模型之前,我们应该提到“Frenet Coordinates”,它是一种以比传统x,y笛卡尔坐标更直观的方式表示道路位置的方式. 用Frenet坐标,我们使用变量 s和d描 ...
- OpenGL中视点模型坐标的理解
个人的理解: gluLookAt中的eye.center和up的坐标原点是ModelView中的坐标原点,右手坐标系,Z轴正向指向显示器外侧 glOrtho中的near和far参数距离相对eye而言, ...
- 百度Apollo无人驾驶入门课程下载
本文提供 百度Apollo官网的无人驾驶入门课程下载,主要为视频文件. 视频数量:101个:文件格式:MP4:视频总时长:2小时40分钟:文件总大小:约1.13GB: 马上下载 关注公众号罗孚传说(R ...
- 【路径规划】 Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame (附python代码实例)
参考与前言 2010年,论文 Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame 地址:https ...
- opengl笔记——旋转,一段代码的理解
重看:opengl笔记——OpenGL好资料备忘 在找到这段代码,对理解opengl旋转很有帮助 ... glPushMatrix(); // initialze ModelView matrix g ...
- 关于opengl中的矩阵平移,矩阵旋转,推导过程理解 OpenGL计算机图形学的一些必要矩阵运算知识
原文作者:aircraft 原文链接:https://www.cnblogs.com/DOMLX/p/12166896.html 为什么引入齐次坐标的变换矩阵可以表示平移呢? - Yu Mao的回答 ...
- opengl 笔记(1)
参考<opengl入门教程>.<OpenGL之坐标转换>.<OpenGL绘制管线操作细节>等资料. 复习下留个备忘:) /*- * Opengl Demo Test ...
- HTML5- Canvas入门(一)
周老虎落网的时候,网易跟腾讯都推出了牛逼轰轰的HTML5页面来展示其关系网(网易http://news.163.com/special/data_zyk/ ,腾讯http://news.qq.com ...
- HTML元素的offsetWidht、clientWidth、scrollWidth属性区别
每个HTML元素都有以下属性 offsetWidth:内容+内边距(padding)+边框+滚动条宽度,以css像素返回它的屏幕尺寸. offsetHeight:(同上) offsetLeft:如果o ...
随机推荐
- iview 小问题笔记
总结一下用 iview 组件期间遇到的小问题.一边做项目一边做笔记. 官方文档:iview API 按需引入: 1,iview 分页组件 <Page :total="aboutPage ...
- js &&操作符解析
转载自:http://www.cnblogs.com/huchaoheng/p/4066473.html 前几天看到一个函数,百思不得其解,今天早上醒来看了本js的书,正好讲到操作符的用法,给大家分享 ...
- xml转化为数组
function xml_to_array($xml) { return json_decode(json_encode(simplexml_load_string($xml)), true); }
- CodeChef--SEPT14小结
这套题目只做了几个相对简单的.其他的做起来比较吃力. A 找下规律 /***************************************************************** ...
- Hdu 1384(差分约束)
题目链接 Intervals Time Limit: 10000/5000 MS (Java/Others) Memory Limit: 65536/32768 K (Java/Others)T ...
- mybatis深入理解(八)-----关联表查询
一.一对一关联 1.1.提出需求 根据班级id查询班级信息(带老师的信息) 1.2.创建表和数据 创建一张教师表和班级表,这里我们假设一个老师只负责教一个班,那么老师和班级之间的关系就是一种一对一的关 ...
- netbeans调试webapp 只能用localhost访问
etbeans 我的电脑是192.168.0.2,用这个地址访问 网上有人说,分两种情况 此问题分两种情况: 1. 可以用127.0.0.1访问 2. 不能用127.0.0.1访问 针对第一种情况,我 ...
- 使用Httpclient 完美解决服务端跨域问题
项目需求: jsonp是从前台js的角度考虑,通过Ajax调用springMVC的接口.同一个ip.同一个网络协议.同一个端口,三者都满足就是同一个域,否则就是跨域问题了.首页广告需要一个轮播的效果, ...
- Birt设置导出格式和去掉多余按钮的方法
1.设置导出格式: webcontent>birt>pages>dialog>ExportReportDialogFragment.jsp页面: 找到for ( int i = ...
- 【洛谷】P1876 开灯
P1876 开灯 题目背景 该题的题目是不是感到很眼熟呢? 事实上,如果你懂的方法,该题的代码简直不能再短. 但是如果你不懂得呢?那...(自己去想) 题目描述 首先所有的灯都是关的(注意是关!),编 ...