2.SJ-SLAM-14
第三讲 三维空间刚体运动
本讲目标
理解三维空间的刚体运动描述方式:旋转矩阵、变换矩阵、四元数和欧拉角。
掌握Eigen库的矩阵、几何模块使用方法。
3.1 点、向量和坐标系,旋转矩阵
二维空间与三维空间主要区别在于,其旋转性,二维空间有1个自由度,三维空间有三个自由度。

光说向量不一定跟几何数有关系,比如说三维空间中的向量会跟着三个数,这三个数是向量的坐标,向量坐标和向量本身并不是一回事儿,向量本身可以定义出加法或减法等运算,向量可以平移什么的。
向量的坐标是指向量在一个坐标系下面的一个表示:

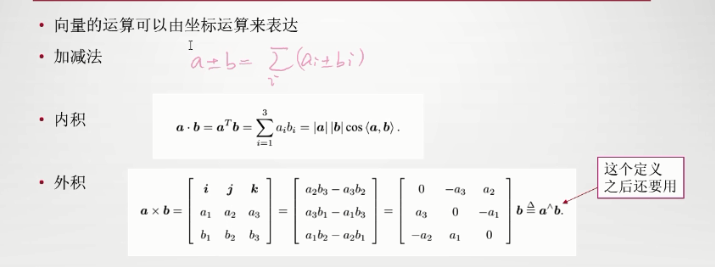
外积:axb可以改成一个矩阵乘以矩阵b的形式,这个矩阵是一个反对称的矩阵,
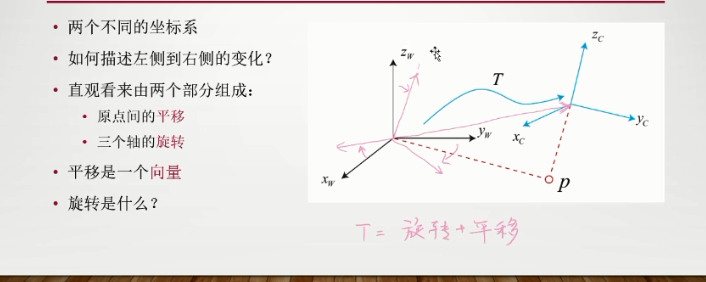
刚体运动:由平移和旋转组成
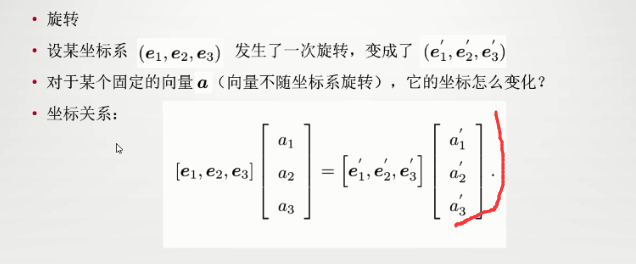
由于他们是同一个向量,故相等。
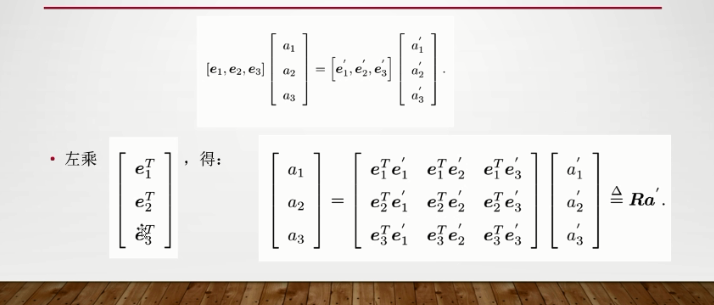
R就称为旋转矩阵,
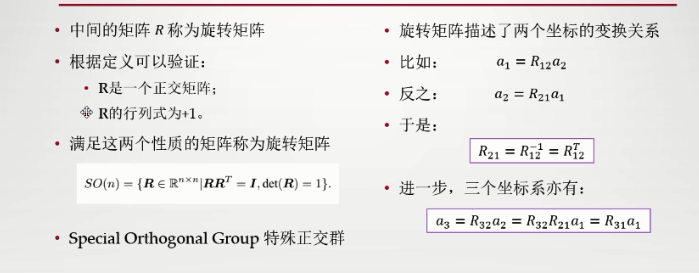
当你有一个旋转矩阵的时候,也就定义出了一种运算,
a1=R12a2,指向量在2坐标系下的坐标a2经过旋转矩阵R12变成了1坐标系下的坐标a1.
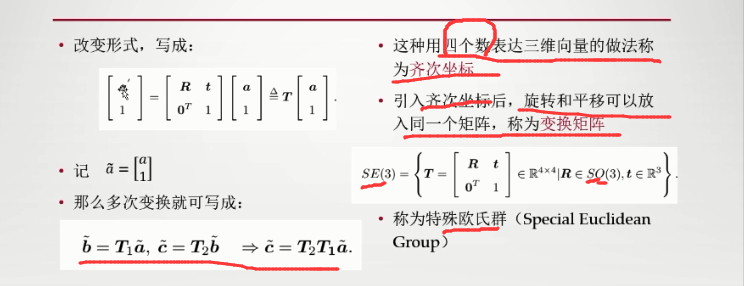
光是旋转的话还是比较方便的,但是加上平移之后就会显得非常麻烦。
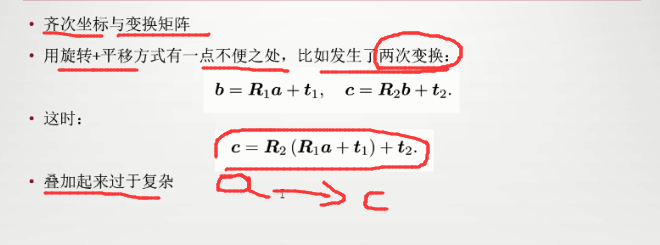
为了方便,把坐标向量都加上1,如下
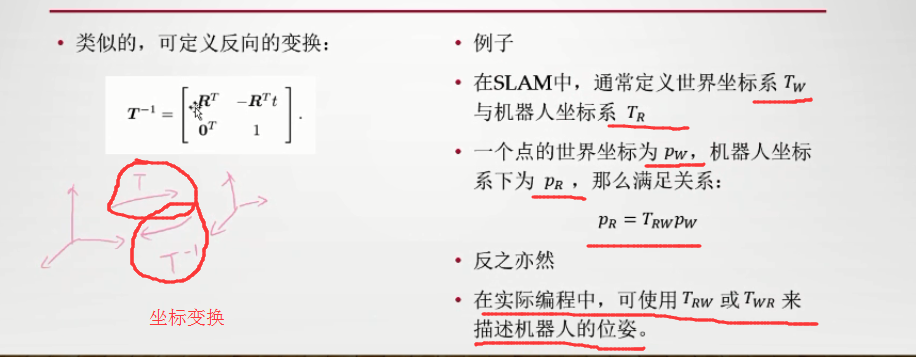
比较偏向于世界坐标转机器人坐标,
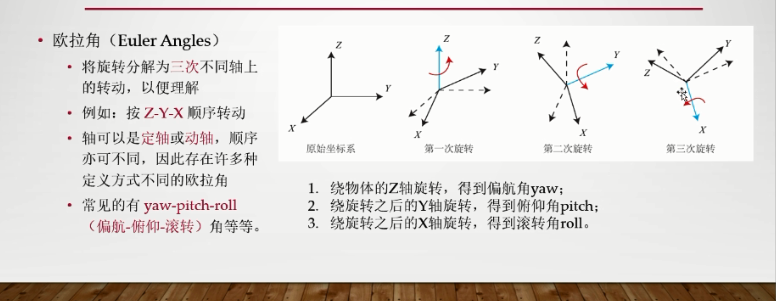
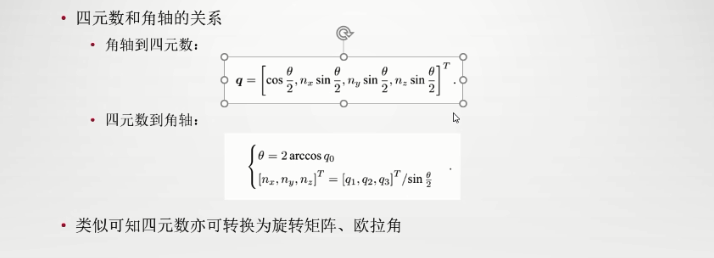
旋转向量、欧拉角
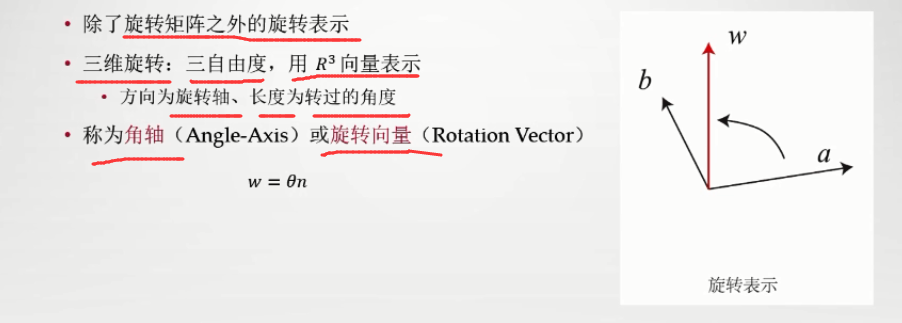
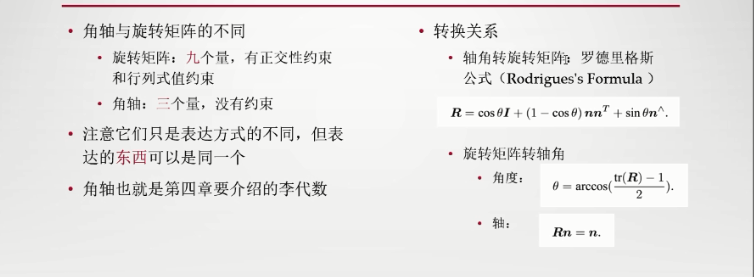
三自由度的东西,用9个数来表示(3x3的旋转矩阵),有点浪费存储空间,用旋转矩阵来算的话还比较麻烦,而且还有一定约束,所以很困难,这就引入了其他的方式
任何一个旋转都可以用一个轴和一个角来表示,如上图的a旋转到b绕轴w,然后有一定角度。
称这种表示称为角轴或者旋转向量。
w描述了整个旋转,方向为一个长度为1的方向为n,角度的大小为Θ
由于旋转矩阵和角轴都不是很直观,下面引用欧拉角
欧拉角不适用,它在计算中存在万向锁的事情,
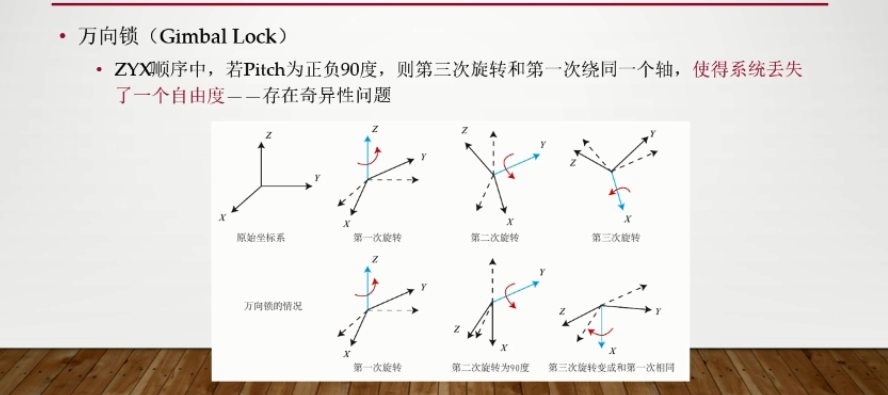
所以在工程中不太会使用欧拉角,而是在表达的时候使用欧拉角
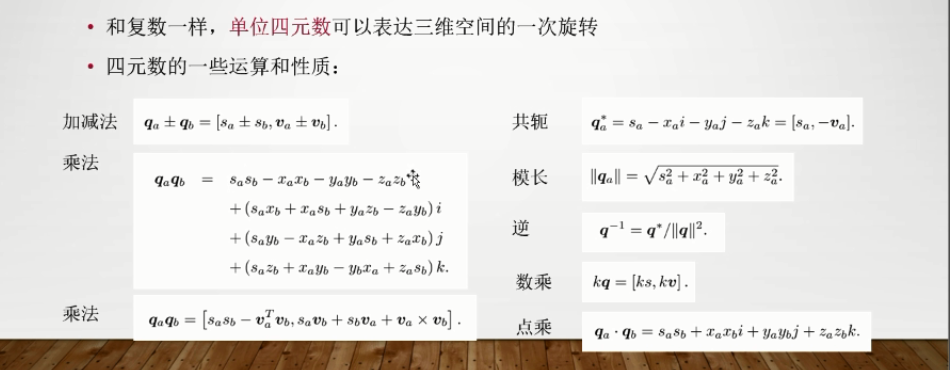
四元素可以用来表达旋转的,在工程里面用处会更广泛一些
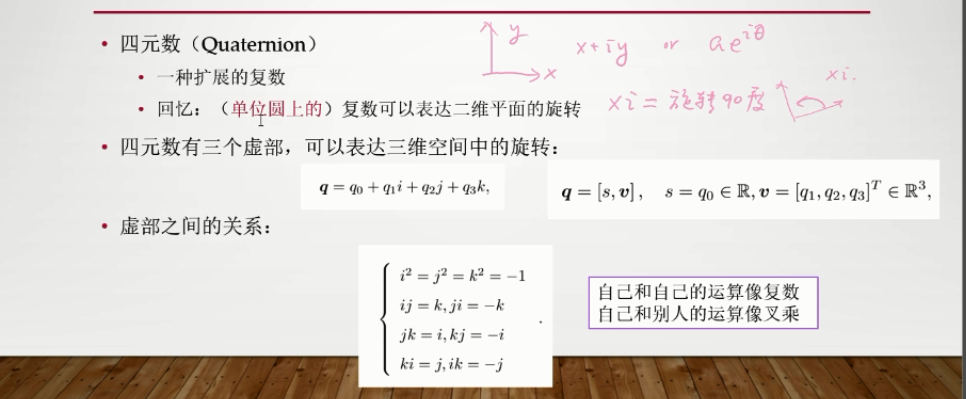
四元素可以表达成一个实部和3个虚部组成,
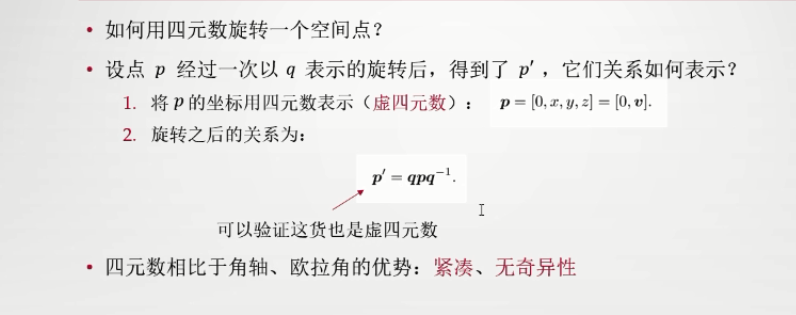
下面讲一下怎么用四元素去旋转一个空间点
将三维空间的点用虚的四元素来表示,
p'=qpq-1,先使用qp来旋转,把p旋转到四维空间,然后乘以一个q-1,把四维空间旋转到三维空间当中,
要把一个轨迹存储到一个文件里面的话,一般都是使用四元素,因为存一个矩阵很麻烦,要有九个量。
下面讲解一下EIGEN里面的几何模块
可视化演示
实践部分:EIGEN
EIGEN它是在C++里面使用的一个矩阵库,效率高,优化做得好,在很多地方都用它去描述c++中的矩阵运算;
要事先安装EIGEN这个库,
sudo apt-get install libeigen3-dev
它会自动安装在目录/usr/include/eigen3/下面,在这里面就是EIGEN的头文件库,要引用这个头文件库,直接引用这里的文件就可以了
它是一个纯头文件的一个库,没有源文件,说明了在最后在使用的时候,不用链接什么库,直接在CMakeLists.txt里面加上头文件目录就可以了,如下
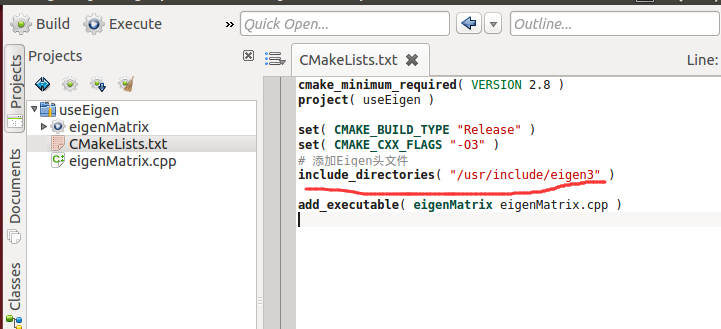
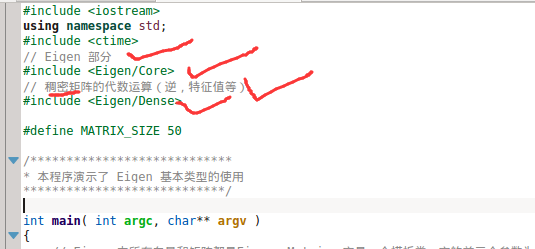
那么引进来之后就可以在源文件里面去加上eigen的头文件,
如Eigen/Core下有eigen的核心运算,
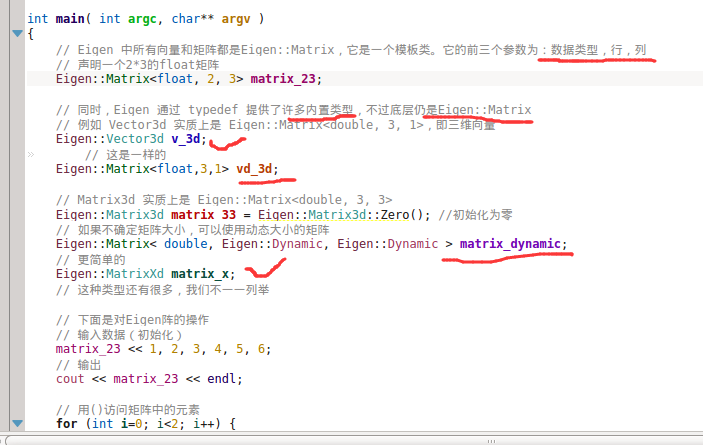
它跟matlab有点像,因为matlab所有的数据都是用矩阵来描述的,eigen也是使用矩阵来使用的;
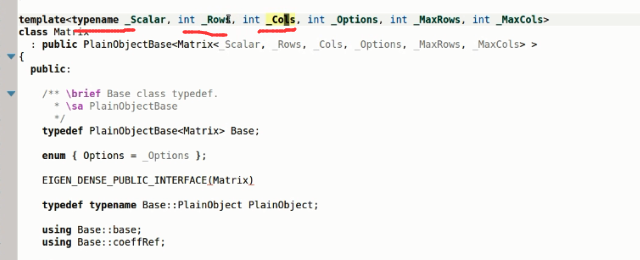
EIGEN的基本数据类型都是在Matrix里面的,他是一个模板类,它有6个模板参数,
2.SJ-SLAM-14的更多相关文章
- JavaSE自学笔记
ch03 [Thu Aug 18 2016 11:22:26 GMT+0800] 对象变量与对象之间是指代关系,对象变量并不能完全说明有无对象可用.这种指代关系是通过赋值运算建立起来的.对象变量保存的 ...
- (自用)专业排版套装:CTeX + TeXStudio
\documentclass[UTF8,landscape]{ctexart}%UTF8,ctexart中文支持,landscape横向版面 \usepackage{tikz}%画图 \usepack ...
- SLAM Course - WS13/14 by Cyrill Stachniss (1) 课程资源汇总
本帖是作者学习SLAM 课程笔记的资源帖,汇总了SLAM Course - WS13/14 by Cyrill Stachniss 的相关资源. 1. 课程网站,有相关课件作业和教学视频下载. htt ...
- SLAM+语音机器人DIY系列:(一)Linux基础——2.安装Linux发行版ubuntu系统
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(二)ROS入门——4.如何编写ROS的第一个程序hello_world
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- 一颗躁动的心---下决心从SLAM开始,不钻研嵌入式底层了
在写这个随笔时,北京的外面正在下2016的第一场雪.夜深人尽之时总会考虑一下自己的未来在何方. 长这么大了,我发现我这人始终不能坚定不移的朝着一个方向努力,总是朝三暮四,对学习更是朝令夕改,这造成了我 ...
- 一起做RGB-D SLAM 第二季 (一)
小萝卜:师兄!过年啦!是不是很无聊啊!普通人的生活就是赚钱花钱,实在是很没意思啊! 师兄:是啊…… 小萝卜:他们都不懂搞科研和码代码的乐趣呀! 师兄:可不是嘛…… 小萝卜:所以今年过年,我们再做一个S ...
- SLAM拾萃(3):siftGPU
前言 本周博客我们给大家介绍一下SiftGPU.由于特征匹配是SLAM中非常耗时间的一步,许多人都想把它的时间降至最短,因此目前ORB成了非常受欢迎的特征.而老牌SIFT,则一直给人一种“很严谨很精确 ...
- implement Google's Open Source Slam "Cartographer" demos in ROS/rviz
Cartographer is a backpack equipped with Simultaneous Localization and Mapping (SLAM) technology. 1. ...
- (转) 实时SLAM的未来及与深度学习的比较
首页 视界智尚 算法技术 每日技术 来打我呀 注册 实时SLAM的未来及与深度学习的比较 The Future of Real-Time SLAM and “Deep Learni ...
随机推荐
- 简单的看Unicode和UTF-8的区别
作者:uuspider链接:http://www.zhihu.com/question/23374078/answer/65352538来源:知乎著作权归作者所有,转载请联系作者获得授权. 举一个例子 ...
- beifen---http://vdisk.weibo.com/s/uhCtnyUhD0Ooc
- [GUIDE] How to Setup Ubuntu 16.04 LTS Xenial Xerus for Compiling Android ROMs
With a new version of Ubuntu comes an update to my guide for setting up a build environment to compi ...
- Django知识梳理
请求周期: url > 路由 > 函数或类 > 返回字符串或模板语言 Form 表单提交: 先处理模板语言再讲HTML发出去 提交 > url > 函数或类中的方法 — ...
- RabbitMQ安装和介绍
简单的安装方式 yum安装erlang,下载rpm包安装rabbitmq 一.编译安装erlang 1. 官方下载包并解压 wget http://erlang.org/download/otp_sr ...
- HDU 5313 Bipartite Graph(二分图染色+01背包水过)
Problem Description Soda has a bipartite graph with n vertices and m undirected edges. Now he wants ...
- Html.DropDownListFor的选项值为字符型问题
我快要疯了.asp.net mvc的这个DropDownListFor,无论在服务器端如何设置,设置哪个值被选中,结果到了页面输出,选中值根本没有被选中,没有任何一个值被选中,下拉框只冷冰冰地显示一个 ...
- Vue中data重置问题
Object.assign() Object.assign()方法用于将所有可枚举属性的值从一个或多个源对象复制到目标对象.它将返回目标对象. 目标对象有1个,后边可以有多个源对象.注意他只会拷贝源对 ...
- Pipeline inbound(netty源码7)
netty源码死磕7 Pipeline 入站流程详解 1. Pipeline的入站流程 在讲解入站处理流程前,先脑补和铺垫一下两个知识点: (1)如何向Pipeline添加一个Handler节点 ( ...
- Rethinking the Inception Architecture for Computer Vision
https://arxiv.org/abs/1512.00567 Convolutional networks are at the core of most state-of-the-art com ...