2.SJ-SLAM-14
第三讲 三维空间刚体运动
本讲目标
理解三维空间的刚体运动描述方式:旋转矩阵、变换矩阵、四元数和欧拉角。
掌握Eigen库的矩阵、几何模块使用方法。
3.1 点、向量和坐标系,旋转矩阵
二维空间与三维空间主要区别在于,其旋转性,二维空间有1个自由度,三维空间有三个自由度。

光说向量不一定跟几何数有关系,比如说三维空间中的向量会跟着三个数,这三个数是向量的坐标,向量坐标和向量本身并不是一回事儿,向量本身可以定义出加法或减法等运算,向量可以平移什么的。
向量的坐标是指向量在一个坐标系下面的一个表示:

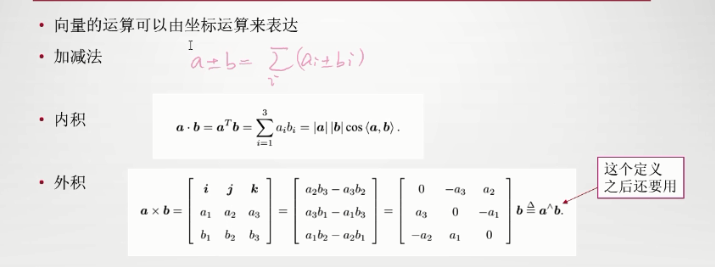
外积:axb可以改成一个矩阵乘以矩阵b的形式,这个矩阵是一个反对称的矩阵,
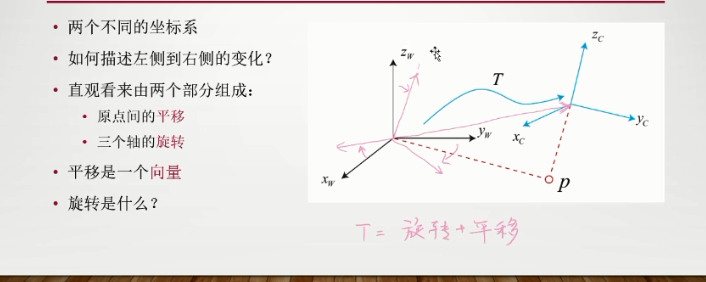
刚体运动:由平移和旋转组成
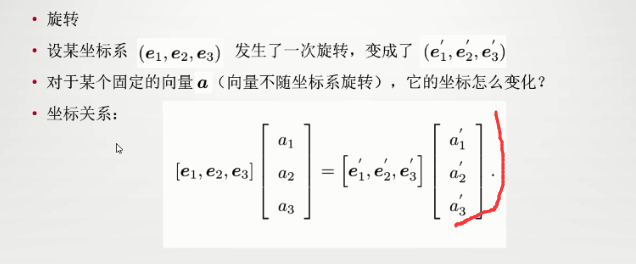
由于他们是同一个向量,故相等。
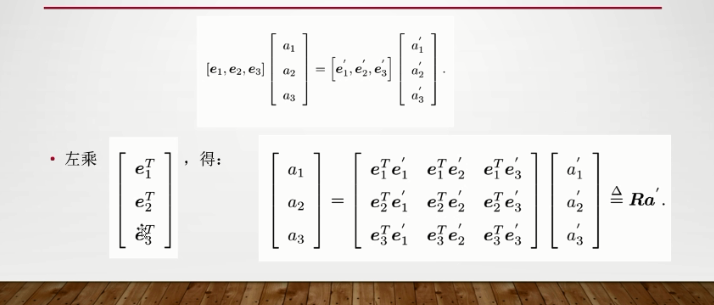
R就称为旋转矩阵,
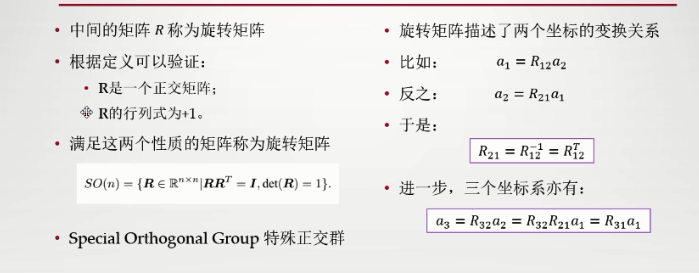
当你有一个旋转矩阵的时候,也就定义出了一种运算,
a1=R12a2,指向量在2坐标系下的坐标a2经过旋转矩阵R12变成了1坐标系下的坐标a1.
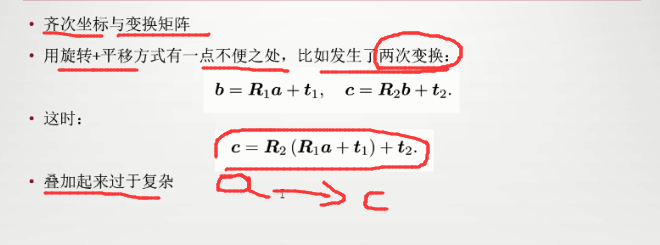
光是旋转的话还是比较方便的,但是加上平移之后就会显得非常麻烦。
为了方便,把坐标向量都加上1,如下
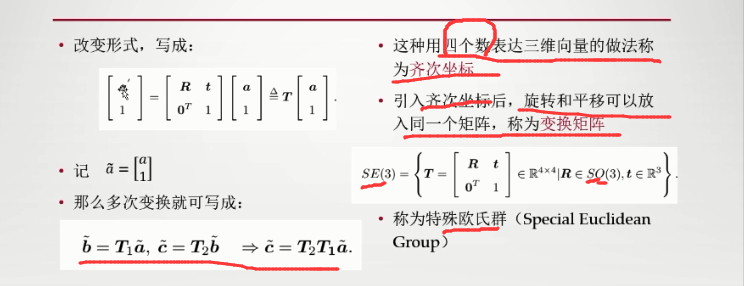
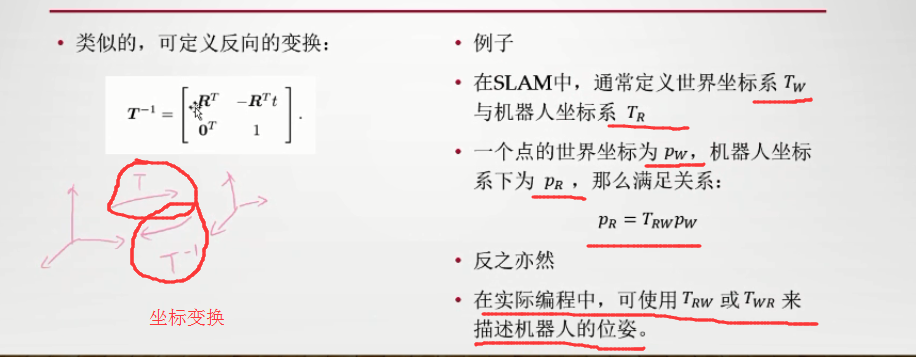
比较偏向于世界坐标转机器人坐标,
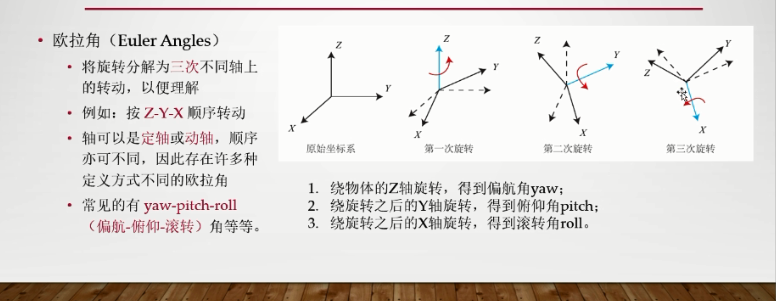
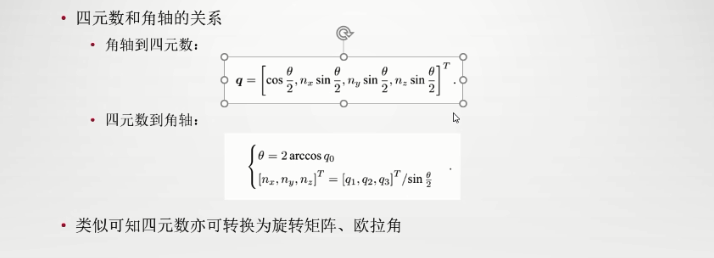
旋转向量、欧拉角
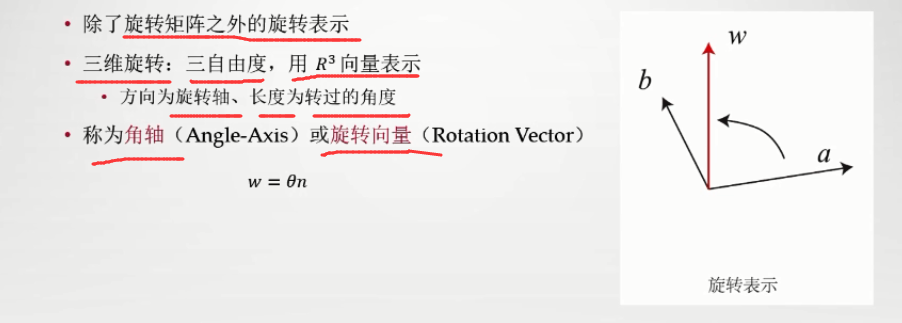
三自由度的东西,用9个数来表示(3x3的旋转矩阵),有点浪费存储空间,用旋转矩阵来算的话还比较麻烦,而且还有一定约束,所以很困难,这就引入了其他的方式
任何一个旋转都可以用一个轴和一个角来表示,如上图的a旋转到b绕轴w,然后有一定角度。
称这种表示称为角轴或者旋转向量。
w描述了整个旋转,方向为一个长度为1的方向为n,角度的大小为Θ
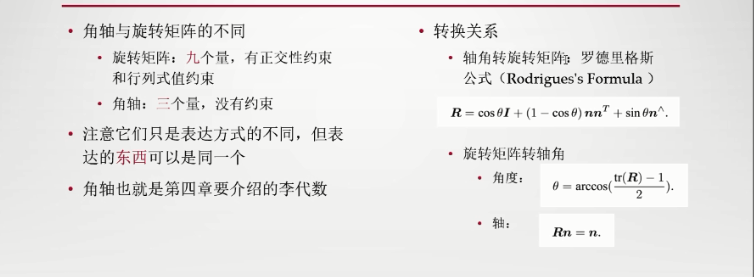
由于旋转矩阵和角轴都不是很直观,下面引用欧拉角
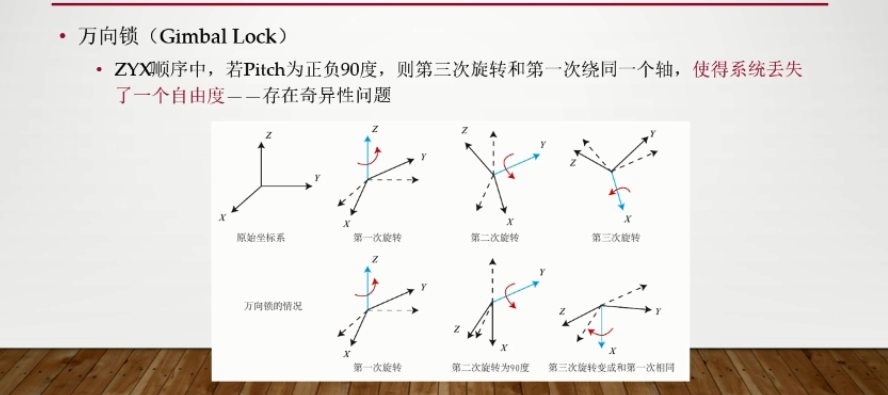
欧拉角不适用,它在计算中存在万向锁的事情,
所以在工程中不太会使用欧拉角,而是在表达的时候使用欧拉角
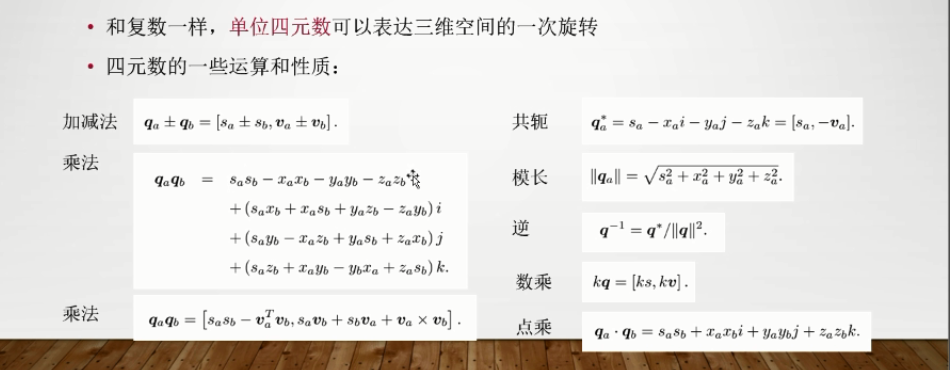
四元素可以用来表达旋转的,在工程里面用处会更广泛一些
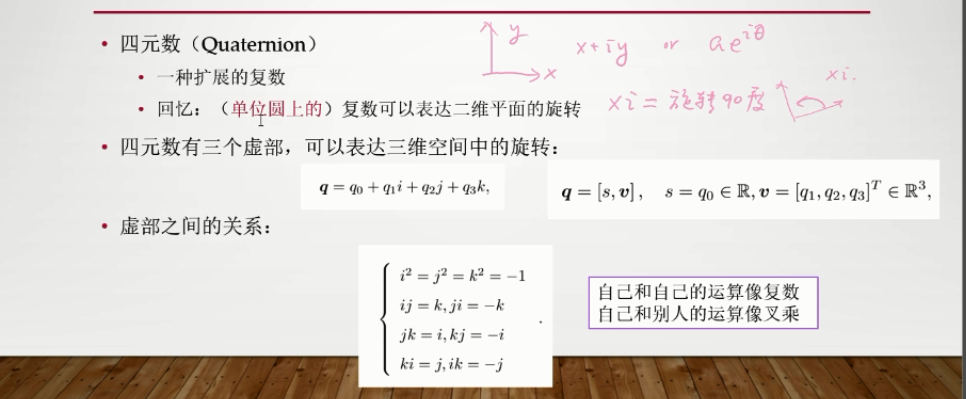
四元素可以表达成一个实部和3个虚部组成,
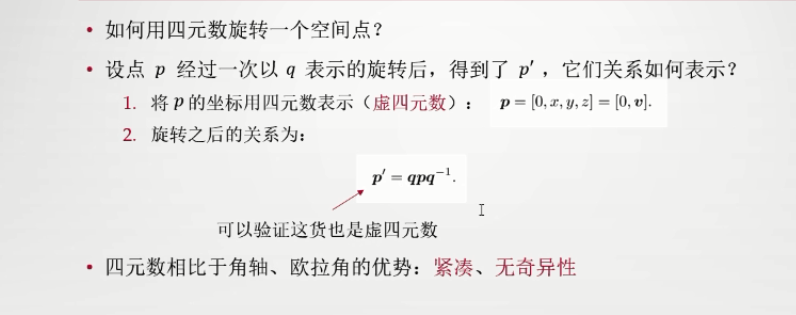
下面讲一下怎么用四元素去旋转一个空间点
将三维空间的点用虚的四元素来表示,
p'=qpq-1,先使用qp来旋转,把p旋转到四维空间,然后乘以一个q-1,把四维空间旋转到三维空间当中,
要把一个轨迹存储到一个文件里面的话,一般都是使用四元素,因为存一个矩阵很麻烦,要有九个量。
下面讲解一下EIGEN里面的几何模块
可视化演示
实践部分:EIGEN
EIGEN它是在C++里面使用的一个矩阵库,效率高,优化做得好,在很多地方都用它去描述c++中的矩阵运算;
要事先安装EIGEN这个库,
sudo apt-get install libeigen3-dev
它会自动安装在目录/usr/include/eigen3/下面,在这里面就是EIGEN的头文件库,要引用这个头文件库,直接引用这里的文件就可以了
它是一个纯头文件的一个库,没有源文件,说明了在最后在使用的时候,不用链接什么库,直接在CMakeLists.txt里面加上头文件目录就可以了,如下
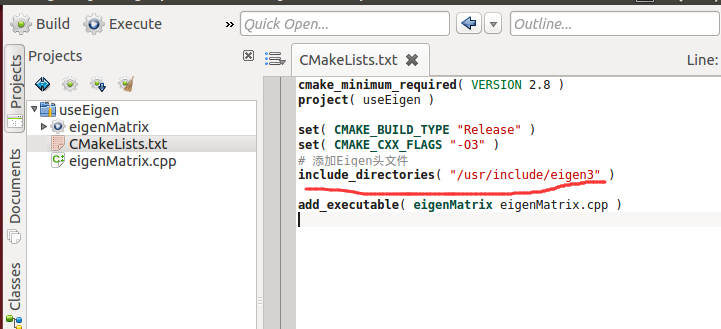
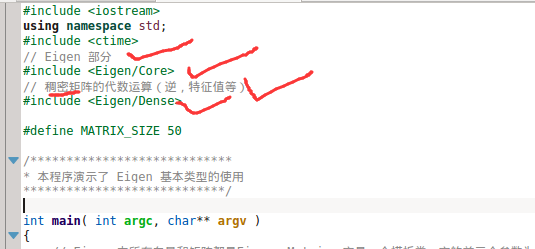
那么引进来之后就可以在源文件里面去加上eigen的头文件,
如Eigen/Core下有eigen的核心运算,
它跟matlab有点像,因为matlab所有的数据都是用矩阵来描述的,eigen也是使用矩阵来使用的;
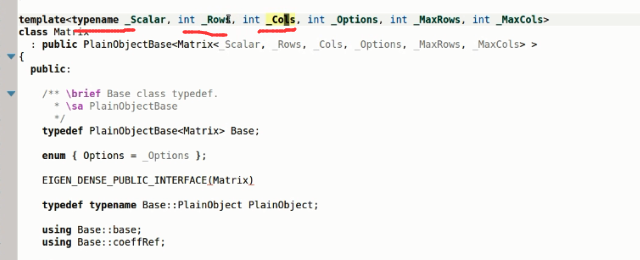
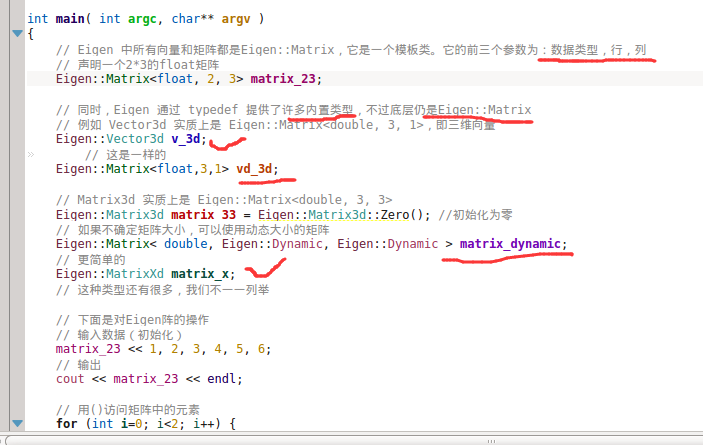
EIGEN的基本数据类型都是在Matrix里面的,他是一个模板类,它有6个模板参数,
2.SJ-SLAM-14的更多相关文章
- JavaSE自学笔记
ch03 [Thu Aug 18 2016 11:22:26 GMT+0800] 对象变量与对象之间是指代关系,对象变量并不能完全说明有无对象可用.这种指代关系是通过赋值运算建立起来的.对象变量保存的 ...
- (自用)专业排版套装:CTeX + TeXStudio
\documentclass[UTF8,landscape]{ctexart}%UTF8,ctexart中文支持,landscape横向版面 \usepackage{tikz}%画图 \usepack ...
- SLAM Course - WS13/14 by Cyrill Stachniss (1) 课程资源汇总
本帖是作者学习SLAM 课程笔记的资源帖,汇总了SLAM Course - WS13/14 by Cyrill Stachniss 的相关资源. 1. 课程网站,有相关课件作业和教学视频下载. htt ...
- SLAM+语音机器人DIY系列:(一)Linux基础——2.安装Linux发行版ubuntu系统
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- SLAM+语音机器人DIY系列:(二)ROS入门——4.如何编写ROS的第一个程序hello_world
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- 一颗躁动的心---下决心从SLAM开始,不钻研嵌入式底层了
在写这个随笔时,北京的外面正在下2016的第一场雪.夜深人尽之时总会考虑一下自己的未来在何方. 长这么大了,我发现我这人始终不能坚定不移的朝着一个方向努力,总是朝三暮四,对学习更是朝令夕改,这造成了我 ...
- 一起做RGB-D SLAM 第二季 (一)
小萝卜:师兄!过年啦!是不是很无聊啊!普通人的生活就是赚钱花钱,实在是很没意思啊! 师兄:是啊…… 小萝卜:他们都不懂搞科研和码代码的乐趣呀! 师兄:可不是嘛…… 小萝卜:所以今年过年,我们再做一个S ...
- SLAM拾萃(3):siftGPU
前言 本周博客我们给大家介绍一下SiftGPU.由于特征匹配是SLAM中非常耗时间的一步,许多人都想把它的时间降至最短,因此目前ORB成了非常受欢迎的特征.而老牌SIFT,则一直给人一种“很严谨很精确 ...
- implement Google's Open Source Slam "Cartographer" demos in ROS/rviz
Cartographer is a backpack equipped with Simultaneous Localization and Mapping (SLAM) technology. 1. ...
- (转) 实时SLAM的未来及与深度学习的比较
首页 视界智尚 算法技术 每日技术 来打我呀 注册 实时SLAM的未来及与深度学习的比较 The Future of Real-Time SLAM and “Deep Learni ...
随机推荐
- iOS_12_tableViewCell的删除更新_红楼梦
终于效果图: Girl.h // // Girl.h // 12_tableView的增删改 // // Created by beyond on 14-7-27. // Copyright (c) ...
- 阿里云nginx+thinkphp环境运行会直接下载php文件的问题。
测试了好久,在网上查了各种nginx.conf的虚拟机配置都没用 其实最简单的方法就是在php.ini中找到 #cgi.fix_pathinfo=1; 去掉前面的#,如果值不是1则改为1
- 当CSDN携手Markdown
当CSDN携手Markdown Tags: CSDN Markdown 当CSDN携手Markdown Markdown CSDN-Markdown 也不知道是不是基于 Github 崛起的因素,Ma ...
- 使用JavaScript获取浏览器UserAgent
可以在浏览器地址栏输入about:version来查看UserAgent等信息 但是在Win10系统,本人亲测,IE和Edge用这样的方式都获取不到信息 在我惯用的QQ浏览器上倒是可以获取到 为了能方 ...
- jps不显示java进程信息
本来想自己整理,发现已经有前人整理,并且完美解决了我的问题,故转载,感谢分享 转自:http://trinea.iteye.com/blog/1196400 对于jps较熟悉可以直接查看第二部分的分析 ...
- jzyz集训 0228
早上考了一波. 出题人是wangyurzee王队长,题目亲民,数据很水(除了第二题).用来做比赛很不错.(尽管我只有第一题A了). 第一题大意是给你n个操作,每个操作是将你手上的数字区间集合与给出的区 ...
- STL版 括号匹配(感觉不如之前自己用数组模拟的跑的快)
数据结构实验之栈四:括号匹配 Time Limit: 1000MS Memory limit: 65536K 题目描述 给你一串字符,不超过50个字符,可能包括括号.数字.字母.标点符号.空格,你的 ...
- POJ2478 Farey Sequence —— 欧拉函数
题目链接:https://vjudge.net/problem/POJ-2478 Farey Sequence Time Limit: 1000MS Memory Limit: 65536K To ...
- linux下mysql开启二进制日志
mysql的查询日志,慢查询日志,错误日志,网上的设置方法是正确的.但在二进制日志上设置有问题.正确的设置方法如下, 在/etc/my.cnf文件中[mysqld]下加上: server-id = 1 ...
- android:Android中用文件初始化sqlite数据库
很多时候在应用安装初始化时,需要创建本地数据库,同时为数据库添加数据,之后再从数据库中读取数据. 这里有2个思路 1.先在本地创建一个能支持android使用的sqlite数据库文件,启动时,用现成的 ...