EmguCV学习——简单算法 差分与高斯
公司项目需要检测运动物体,我对opencv也没啥研究,google了好久看了好多方法,最简单的就是差分与高斯背景建模了。
旁边搞c++的同事正在搞更nb的算法,等出来了 我再转成C#版的分享。
先看差分
//移动窗口
[System.Runtime.InteropServices.DllImportAttribute("opencv_highgui2410.dll", EntryPoint = "cvMoveWindow")]
public static extern void cvMoveWindow([System.Runtime.InteropServices.InAttribute()] [System.Runtime.InteropServices.MarshalAsAttribute(System.Runtime.InteropServices.UnmanagedType.LPStr)] string name, int x, int y);
//代表x帧差分,可以自由更改
static int USE_N_FRAMES_DIFF = ; public void PicDiff(string videoPath)
{
int iFrameIndex = ; IntPtr pIplGrayImg = IntPtr.Zero; IntPtr[] pIplFrameDiff = new IntPtr[USE_N_FRAMES_DIFF - ]; IntPtr[] pIplFrame = new IntPtr[USE_N_FRAMES_DIFF]; IntPtr CatchFrame = CvInvoke.cvCreateFileCapture(videoPath);
// 得到总帧数
var count = CvInvoke.cvGetCaptureProperty(CatchFrame, Emgu.CV.CvEnum.CAP_PROP.CV_CAP_PROP_FRAME_COUNT);
// 视频宽度
int wd = (int)CvInvoke.cvGetCaptureProperty(CatchFrame, Emgu.CV.CvEnum.CAP_PROP.CV_CAP_PROP_FRAME_WIDTH);
// 视频高度
int hg = (int)CvInvoke.cvGetCaptureProperty(CatchFrame, Emgu.CV.CvEnum.CAP_PROP.CV_CAP_PROP_FRAME_HEIGHT);
//// 当前帧位置
//CvInvoke.cvGetCaptureProperty(CatchFrame, Emgu.CV.CvEnum.CAP_PROP.CV_CAP_PROP_POS_FRAMES);
//// 帧频
CvInvoke.cvGetCaptureProperty(CatchFrame, Emgu.CV.CvEnum.CAP_PROP.CV_CAP_PROP_FPS); CvInvoke.cvNamedWindow("source");
CvInvoke.cvNamedWindow("Out");
cvMoveWindow("source", , );
cvMoveWindow("Out", , );
IntPtr FrameImg; IntPtr rawImage = IntPtr.Zero;
rawImage = CvInvoke.cvCreateImage(new Size(wd, hg), Emgu.CV.CvEnum.IPL_DEPTH.IPL_DEPTH_8U, );
IntPtr pIplFrameDiffOr = IntPtr.Zero;
IntPtr pIplFrameDiffOrCC = IntPtr.Zero;
IntPtr pIplFrameSmooth = IntPtr.Zero;
pIplFrameDiffOr = CvInvoke.cvCreateImage(new Size(wd, hg), Emgu.CV.CvEnum.IPL_DEPTH.IPL_DEPTH_8U, );
pIplFrameDiffOrCC = CvInvoke.cvCreateImage(new Size(wd, hg), Emgu.CV.CvEnum.IPL_DEPTH.IPL_DEPTH_8U, );
pIplFrameSmooth = CvInvoke.cvCreateImage(new Size(wd, hg), Emgu.CV.CvEnum.IPL_DEPTH.IPL_DEPTH_8U, ); while ((FrameImg = CvInvoke.cvQueryFrame(CatchFrame)) != IntPtr.Zero)
{ Rectangle cr = CvInvoke.cvGetImageROI(FrameImg); pIplGrayImg = CvInvoke.cvCreateImage(cr.Size, Emgu.CV.CvEnum.IPL_DEPTH.IPL_DEPTH_8U, ); CvInvoke.cvCvtColor(FrameImg, pIplGrayImg, Emgu.CV.CvEnum.COLOR_CONVERSION.BGR2GRAY); CvInvoke.cvSaveImage(savename, pIplGrayImg, IntPtr.Zero);
pIplFrame[iFrameIndex % USE_N_FRAMES_DIFF] = pIplGrayImg; if (iFrameIndex >= USE_N_FRAMES_DIFF - )
{
for (int i = ; i < USE_N_FRAMES_DIFF - ; i++)
{ CvInvoke.cvAbsDiff(pIplFrame[i], pIplFrame[i + ], rawImage);
pIplFrameDiff[i] = rawImage;
CvInvoke.cvThreshold(pIplFrameDiff[i], pIplFrameDiff[i], , , Emgu.CV.CvEnum.THRESH.CV_THRESH_BINARY);
//上面第三个参数为设置的阀值以此来根据物体运动时前后帧的差异产生白点
} for (int i = ; i < USE_N_FRAMES_DIFF - ; i++)
{
CvInvoke.cvOr(pIplFrameDiff[i], pIplFrameDiff[i + ], pIplFrameDiffOr, IntPtr.Zero); if (i + < USE_N_FRAMES_DIFF - )
{
CvInvoke.cvCopy(pIplFrameDiffOr, pIplFrameDiff[i + ], IntPtr.Zero);
} }
} CvInvoke.cvShowImage("source", FrameImg);
CvInvoke.cvShowImage("Out", pIplFrameDiffOr); CvInvoke.cvWaitKey();
iFrameIndex++; }
}
程序运行结果如图所示

高斯背景建模
public void guassModel(string videoPath)
{
int iFrameIndex = ;
IntPtr CatchFrame = CvInvoke.cvCreateFileCapture(videoPath);
// 得到总帧数
var count = CvInvoke.cvGetCaptureProperty(CatchFrame, Emgu.CV.CvEnum.CAP_PROP.CV_CAP_PROP_FRAME_COUNT);
// 视频宽度
int wd = (int)CvInvoke.cvGetCaptureProperty(CatchFrame, Emgu.CV.CvEnum.CAP_PROP.CV_CAP_PROP_FRAME_WIDTH);
// 视频高度
int hg = (int)CvInvoke.cvGetCaptureProperty(CatchFrame, Emgu.CV.CvEnum.CAP_PROP.CV_CAP_PROP_FRAME_HEIGHT);
//// 帧频
CvInvoke.cvGetCaptureProperty(CatchFrame, Emgu.CV.CvEnum.CAP_PROP.CV_CAP_PROP_FPS);
IntPtr background = CvInvoke.cvCreateImage(new Size(wd, hg), Emgu.CV.CvEnum.IPL_DEPTH.IPL_DEPTH_8U, );
IntPtr foreground = CvInvoke.cvCreateImage(new Size(wd, hg), Emgu.CV.CvEnum.IPL_DEPTH.IPL_DEPTH_8U, ); IntPtr FrameImg;
Emgu.CV.VideoSurveillance.BGStatModel<Bgr> bg = null;
CvInvoke.cvNamedWindow("bg");
CvInvoke.cvNamedWindow("fg");
CvInvoke.cvNamedWindow("source");
cvMoveWindow("bg", , );
cvMoveWindow("gf", , );
cvMoveWindow("source", , );
while ((FrameImg = CvInvoke.cvQueryFrame(CatchFrame)) != IntPtr.Zero)
{
Image<Bgr, byte> FramePic = new Image<Bgr, byte>(wd, hg);
CvInvoke.cvCopy(FrameImg, FramePic, IntPtr.Zero);
iFrameIndex++;
if (iFrameIndex == )
{
//高斯背景建模参数
Emgu.CV.Structure.MCvGaussBGStatModelParams pstruct = new MCvGaussBGStatModelParams();
pstruct.win_size = ;
pstruct.n_gauss = ;
pstruct.bg_threshold = 0.7;
pstruct.std_threshold = 3.5;
pstruct.minArea = ;
pstruct.weight_init = 0.333;
pstruct.variance_init = ;
bg = new Emgu.CV.VideoSurveillance.BGStatModel<Bgr>(FramePic, ref pstruct);
}
else
{
CvInvoke.cvShowImage("source", FrameImg);
CvInvoke.cvWaitKey();
//更新
bg.Update(FramePic);
background = bg.BackgroundMask;
CvInvoke.cvShowImage("bg", background);
CvInvoke.cvWaitKey();
foreground = bg.ForegroundMask;
CvInvoke.cvShowImage("fg", foreground);
CvInvoke.cvWaitKey();
}
}
CvInvoke.cvDestroyWindow("source");
CvInvoke.cvDestroyWindow("bg");
CvInvoke.cvDestroyWindow("fg");
}
运行结果如图
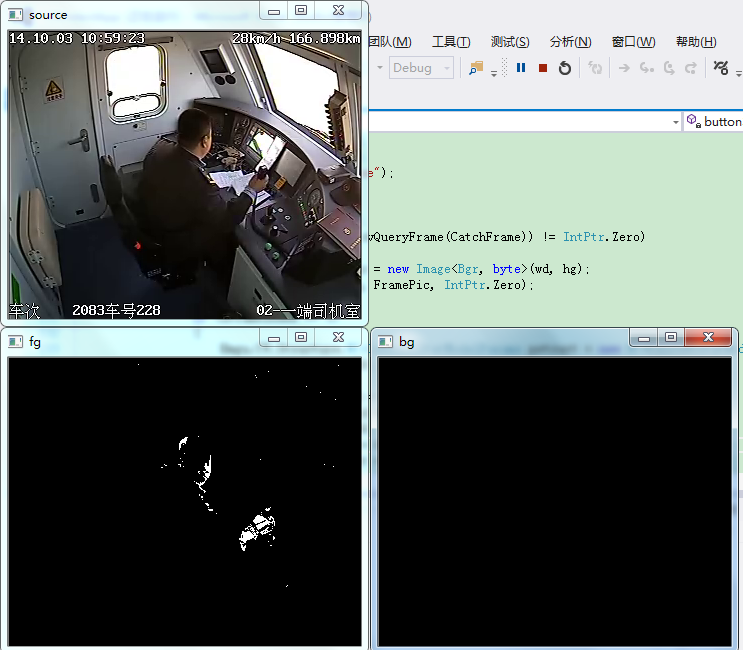
高斯的缺点就是受光照影响太大,近距离效果不好。
种一棵树最好的时间是十年前,其次是现在。
EmguCV学习——简单算法 差分与高斯的更多相关文章
- EmguCV学习——简单使用
关于EmguCV我就不多说了,是对应于OpenCV的一套net库. 公司是视觉方面的业务,我又不会c++(好想会啊,正在学习中).由于各种需求,自己觉得对c++不是特别感冒,所以选用了net下的ope ...
- [置顶] 小白学习KM算法详细总结--附上模板题hdu2255
KM算法是基于匈牙利算法求最大或最小权值的完备匹配 关于KM不知道看了多久,每次都不能完全理解,今天花了很久的时间做个总结,归纳以及结合别人的总结给出自己的理解,希望自己以后来看能一目了然,也希望对刚 ...
- 记录:EM 算法估计混合高斯模型参数
当概率模型依赖于无法观测的隐性变量时,使用普通的极大似然估计法无法估计出概率模型中参数.此时需要利用优化的极大似然估计:EM算法. 在这里我只是想要使用这个EM算法估计混合高斯模型中的参数.由于直观原 ...
- 从 SGD 到 Adam —— 深度学习优化算法概览(一) 重点
https://zhuanlan.zhihu.com/p/32626442 骆梁宸 paper插画师:poster设计师:oral slides制作人 445 人赞同了该文章 楔子 前些日在写计算数学 ...
- 学习cordic算法所得(流水线结构、Verilog标准)
最近学习cordic算法,并利用FPGA实现,在整个学习过程中,对cordic算法原理.FPGA中流水线设计.Verilog标准有了更加深刻的理解. 首先,cordic算法的基本思想是通过一系列固定的 ...
- Javascript学习-简单测试环境
Javascript学习-简单测试环境 在<JavaScript忍者秘籍>2.4测试条件基础知识中,作者给出了一个精简版的assert和assert组的实现,对于初学者而言,这无疑是一个很 ...
- 学习排序算法(一):单文档方法 Pointwise
学习排序算法(一):单文档方法 Pointwise 1. 基本思想 这样的方法主要是将搜索结果的文档变为特征向量,然后将排序问题转化成了机器学习中的常规的分类问题,并且是个多类分类问题. 2. 方法流 ...
- CPD轮播广告库的简单算法
在广告的领域中,有一种广告形式,采用的是CPD的售卖模式,为了对流量进行拆分,媒体方会对广告位进行轮播拆分.比如一个广告位,被拆成了10轮播,那么在广告主来预订广告位的时候,这个时候就可以告诉广告主, ...
- php实现简单算法2
php实现简单算法2 去弄php手册,里面有数据结构,有数据结构就好办了,我的算法基础那么好. 而且的话有数据结构的话再配合我脑中的那些算法了,我就都ok啦. 在手册里面搜索php数据结构就好 路径如 ...
随机推荐
- CODESOFT 2015中的二维码该怎样生成
由于二维条码具有储存量大.保密性高.追踪性高.抗损性强.备援性大.成本便宜等特性,其应用 渐趋广泛,因此二维码的制作对于CODESOFT条码设计软件的用户来讲可谓司空见惯.我们最常见的二维码要数QR码 ...
- JavaScript instanceof和typeof的区别
引用自: http://www.cnblogs.com/eoiioe/archive/2008/12/31/1366081.html instanceof和typeof都能用来判断一个变量是否为空 ...
- c-windows-1
< Back 我使用的是<windows程序设计>和VS 首先看到的第一个代码是: /*----------------------------------------------- ...
- Android开发-API指南-<provider>
<provider> 英文原文:http://developer.android.com/guide/topics/manifest/provider-element.html 采集(更新 ...
- 2014年值得学习的25个PS CS6教程(一)
热爱PS的朋友看过来~~~下面跟大家推荐10个高端大气上档次的PS教程(都是英文的哦) 1.为4D电影创建一副3D海报 2.制作3D水果文字 3.肖像图混合数字工艺 4.‘Doctrich – Pos ...
- oracle数据库中的表设置主键自增
oracle中没有自增字段,可通过序列+触发器间接实现,cmd中sqlplus登录,直接运行即可.一般要经过一下几步: 1建立数据表 create table Test_Increase( ...
- PagedList.MVC分页
using System; using System.Collections.Generic; using System.Linq; using System.Web; using System.We ...
- MFC中release版本和debug版本区别
最近MFC写了个程序,生成release版,原来正常,后来删掉了些控件再编译运行,结果竟然报内存读写错误,debug却是正常的.后来将“Project Settings” 中 “C++/C ...
- cordova android ios
一 . cordova android 中js 调用JAVA 方法: 二 . cordova ios --->js 调用object (一); 三 .cordova ios --->OC ...
- cordova 日曆 聯系人 插件使用
日曆插件 聯係人插件 我用聯係人插件, function onSuccess(contact) { alert("Save Success"); }; function onErr ...