多模态自动驾驶混合渲染HRMAD:将NeRF和3DGS进行感知验证和端到端AD测试
基于3DGS和NeRF的三维重建技术在过去的一年中取得了快速的进步,动态模型也变得越来越普遍,然而这些模型仅限于处理原始轨迹域内的对象。
HRMAD作为一种混合方案,将传统的基于网格的动态三维神经重建和物理渲染优势结合,支持在任意位置部署网格动态代理,自由调整环境条件,在多个相机视角下进行自由切换,与传统仿真方法相比有效减少了领域差距,同时保留了可控性。
一、方法描述
HRMAD提出的NeRF2GS双模型训练范式显著提升了合成质量,尤其是道路和车道标志,同时满足交互式帧率。通过此块级并行训练架构,可以处理超过10万平方米场景重建,并同步传输出分割掩膜/法线图/深度图。通过物理光栅化/光线追踪渲染后端,HRMAD支持多个相机模型、LiDAR和Radar的实时多模态输出。如图1所示的模型架构。

图1
具体而言,HRMAD基于RGB相机、GNSS和LiDAR的同步数据进行模型训练。该方案结合了NeRF优秀的泛化能力和3DGS实时的渲染速度,通过T-S结构,将NeRF生成的深度、法线和外观监督信息传递给3DGS模型,并通过正则化将LiDAR深度数据引入NeRF,从而实现更准确的几何结构建模。
传统基于透视投影的渲染方法通常依赖于特定的投影模型,为了在3DGS场景中适配任意传感器,HRMAD提出了一种新的渲染算法架构,如下图2所示。

图2
该架构基于共享代码库实现了光栅化和光线追踪渲染,用于计算高斯沿射线的贡献。这样不仅能够在三维重建场景中支持任意相机畸变模型,还能够减轻LiDAR仿真中伪影的产生。图3展示了在aiSim中采用HRMAD渲染场景并配置LiDAR后,点云的可视化效果。

图3
图4表明HRMAD在极端视角下RGB、深度、法线和分割(基于Mask2Former)模态下的几何细节和表面特性,重建面积约为165000平方米(ZalaZone测试场,此重建场景将于aiSim5.7版本进行发布)。

图4
二、下游任务验证
1、重建质量验证
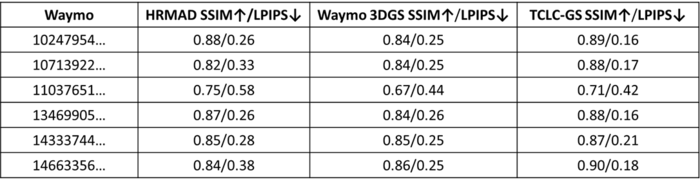
由于HRMAD采用的是基于双边网格的色彩校正方法,传统的PSNR指标不再适用,而SSIM和LPIPS指标对结果相似性更为敏感,但从结果上看,这两个指标仍然受到ISP解耦导致的RAW与重建图像之间色彩失配的影响。这一影响体现在了评估结果中,如表1,表中对比了原始3DGS和TCLC-GS在6个Waymo场景上的指标表现。
表1
2、语义分割验证
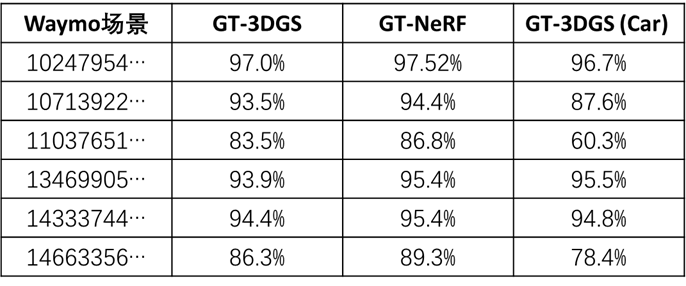
在语义分割上分别从三个角度评估模型性能,首先通过统计所有像素中语义分类一致的比例,反映全局重建一致性。
通过Mask2Former获取真实图像上计算的分割Mask,并与HRMAD-NeRF(Teacher)和HRMAD-NeRF(Student)渲染得到的分割Mask进行比较,验证重建的准确性。同时为了降低道路、天空等易分割区域对整体结果的偏差影响,针对"Car"进行单独IoU计算。
为确保验证过程的公平性,真实图像被重投影至与渲染过程一致的无畸变针孔相机参数空间,当重建结果正确标注了远距离或被遮挡物体,而Mask2Former因输入信息有限导致误判时,此类误差会被计入评估指标。同时在夜间拍摄场景和相机直对太阳的场景中(如场景11037651和14663356),掩膜一致性显著下降。结果如表2所示。
表2
其次在非常规视角下进行模型渲染,并基于Mask2former生成的Mask与模型预测Mask进行比较。此渲染视角沿自车轨迹生成,并在[-1,3]米范围内平移前视相机仿真模型。表3展示了针对道路表面信息和车辆的重建性能。其中Car类型的重建性能相对较低,这是由于Mask2Frame无法检测远处或被遮挡的物体,从而扩大了差异。图5显了示相关结果,绿色为匹配区域,蓝色和橙色分别表示模型预测Mask和Mask2Former的Mask输出。
表3
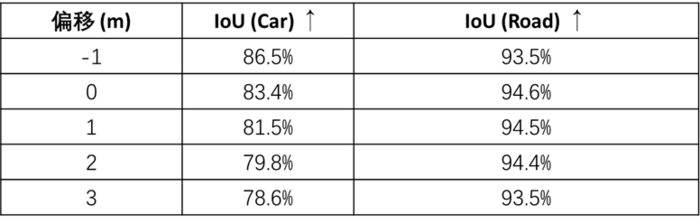

图5
最后在极端渲染视角下(高5m,横向偏移2m,向下偏转25°),针对车道线和路沿语义分割结果进行了定性评估,如图6所示。

图6
3、3D目标检测验证
为了验证HRMAD在3D目标检测上的一致性,采用在Waymo Open数据集训练中公开的DEVIANT 3D目标检测模型,进行定量和定性实验。
定量实验中,在Waymo-13469905891836363794片段中从[0,3]横向偏移视角下进行验证,并通过平移变换后的3DBBox定量计算。定性实验选取三个驾驶片段进行静态环境渲染,并基于网格渲染添加动态车辆,主要用于评估仿真生成的车辆是否引入了领域差距。
表4基于Waymo指标进行验证,Original为原始图像。特别在近距离下,HRMAD的表现性能要优于原始图像,这是由于原始图像中假阳FP数量更高。在非常规视角渲染下,观察到的差异主要是横向偏移视角下目标截断的数量增加,但整体检测结果在很大程度上保持一致。
表4
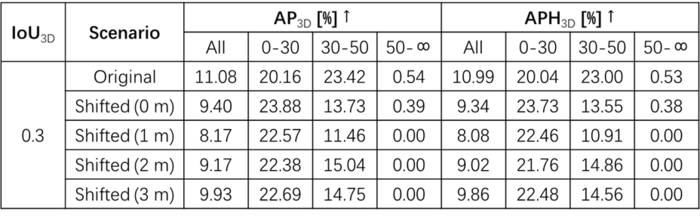
图7为DEVIANT模型在HRMAD渲染Waymo场景中的表现。

图7
三、结语
虽然HRMAD渲染方法旨在最大程度减少区块边界的不连续性,但仍不可避免地会产生可见的伪影,特别是在天空和远距离目标区域中。比如天空的RGB重建效果良好,但在自动驾驶仿真测试场景中,在非常规视角下仍然会导致伪影和结构痕迹。
在下游任务中,HRMAD针对自动驾驶场景的评估结果已非常接近真实数据,但由于样本有限,仍需要更大规模的数据集进行进一步验证。未来的研究也会致力于进一步缩小重建场景和真实数据之间的领域差距,具体来说,可以通过探索层次化高斯泼溅来减少区块伪影,并利用生成的法线信息改进LiDAR强度模拟,来更好地反应点云数据的方向敏感强度。
目前,HRMAD生成场景已集成在aiSim中,可在不同传感器模型配置方案下,实现端到端仿真测试交互式验证和测试。
多模态自动驾驶混合渲染HRMAD:将NeRF和3DGS进行感知验证和端到端AD测试的更多相关文章
- Google Waymo自动驾驶安全技术报告(二)
Waymo的技术在公开道路上.封闭测试场.仿真器进行了广泛的测试,所以可以保证自动驾驶系统的每一部分在其ODD内都有强大.可靠.安全的处理能力. Waymo的自动驾驶系统由三个相互独立.严格测试的子系 ...
- <转载> 从算法上解读自动驾驶是如何实现的?
科技新闻小鹏汽车2016-03-28 10:42 [摘要]车辆路径规划问题中路网模型.路径规划算法和交通信息的智能预测为关键点. 由于驾驶员的驾驶工作繁重,同时随着汽车拥有量的增加,非职业驾驶员的数 ...
- 自动驾驶轻松开发?华为云ModelArts赋能智慧出行
作为战略新兴产业,人工智能已经开始广泛应用于多个领域.近几年,科技公司.互联网公司等各领域的企业纷纷布局自动驾驶.那么,自动驾驶技术究竟发展得如何了?日前,华为云携手上海交通大学创新中心举办的华为云人 ...
- 本科阶段就挑战自动驾驶开发?华为云ModelArts帮你轻松实现!
欢迎添加华为云小助手微信(微信号:HWCloud002 或 HWCloud003),输入关键字"加群",加入华为云线上技术讨论群:输入关键字"最新活动",获取华 ...
- 自动驾驶研究回顾:CVPR 2019摘要
我们相信开发自动驾驶技术是我们这个时代最大的工程挑战之一,行业和研究团体之间的合作将扮演重要角色.由于这个原因,我们一直在通过参加学术会议,以及最近推出的自动驾驶数据集和基于语义地图的3D对象检测的K ...
- 自动驾驶汽车数据不再封闭,Uber 开源新的数据可视化系统
日前,Uber 开源了基于 web 的自动驾驶可视化系统(AVS),称该系统为自动驾驶行业带来理解和共享数据的新方式.AVS 由Uber旗下负责自动驾驶汽车研发的技术事业群(ATG)开发,目前该系统已 ...
- 发布AI芯片昆仑和百度大脑3.0、L4自动驾驶巴士量产下线,这是百度All in AI一年后的最新答卷...
机器之心报道,作者:李泽南. 去年的 7 月 5 日,百度在北京国际会议中心开办了首届「AI 开发者大会」.在会上,百度首次喊出了「All in AI」的口号.一年的时间过去了,今天在同样地点举行的第 ...
- 2020云栖大会智慧出行专场:聚焦高精地图/算法、智能模型、自动驾驶、AR导航
2020云栖大会将于9月17日-18日在线举行,届时将通过官网为全球科技人带来前沿科技.技术产品.产业应用等领域的系列重要分享. 阿里巴巴高德地图携手合作伙伴精心筹备了“智慧出行”专场.我们将为大 ...
- 百亿级小文件存储,JuiceFS 在自动驾驶行业的最佳实践
自动驾驶是最近几年的热门领域,专注于自动驾驶技术的创业公司.新造车企业.传统车厂都在这个领域投入了大量的资源,推动着 L4.L5 级别自动驾驶体验能尽早进入我们的日常生活. 自动驾驶技术实现的核心环节 ...
- Carla 自动驾驶仿真平台的安装与配置指南
简介 Carla 是一款基于 Python 编写和 UE(虚幻引擎)的开源仿真器,用于模拟自动驾驶车辆在不同场景下的行为和决策.它提供了高度可定制和可扩展的驾驶环境,包括城市.高速公路和农村道路等.C ...
随机推荐
- 打造有效安全闭环,天翼云MDR来了!
随着网络攻-防对抗形势愈演愈烈,传统的安全防护模式已难以应对频率暴增.昼夜不停的网络安全攻-击,提升组织安全防护能力势在必行.事实上,一些单位在网络安全建设工作中经验不足,在安全组件/设备采购方面大量 ...
- Project Euler 588 题解
这玩意好像甚至有递推式--不太懂 (为什么是图片?cnblogs 第一个公式没渲染成功) 时间复杂度是 \(O(4^{\deg F}\log K)\) 的. #include<bits/stdc ...
- linux mint安装eclipse
安装eclipse之前需要先安装配置jdk,参考上面, 一.Eclipse的下载与安装 1.首先,在Eclipse的官网中下载最新版的Luna SR2http://www.eclipse.org/do ...
- Doris数据库使用
1.表结构设置 [1]建表时指定副本数量:relication_num [2]排序键 明细模型:DUPLICATE KEY(site_id, city_code) 聚合模型:AGGREGATE KEY ...
- Luogu P7250 BalticOI 山峰 题解 [ 蓝 ] [ 模拟 ] [ 并查集 ] [ BFS ]
Luogu P7250 BalticOI 山峰. 一道大模拟,很暴力,也很难写.建议紫或蓝,标签为模拟.广度优先搜索.并查集. 思路 首先观察到答案取决于路线上的最低点,所以我们可以把所有点的高度丢进 ...
- 多节点oceanbase 集群部署
安装前准备 硬件要求 CPU最少2核 磁盘最少19G 文件系统EXT4 戓 XFS 关闭透明大页 echo never > /sys/kernel/mm/redhat_transparent_h ...
- 当ABB机器人外部轴驱动器过流维修
一.过流故障原因分析 电机负载异常 当ABB机器人外部轴驱动器所承受的负载超过其额定值时,电机需要产生更大的转矩以维持运行,从而导致电流增大.例如,在一些自动化生产线上,如果外部轴需要搬运的物品重量突 ...
- QT5笔记: 14. SpinBox的常用功能
例子: #include "widget.h" #include "ui_widget.h" Widget::Widget(QWidget *parent) : ...
- C#中固定编译时不确定数量的变量(相关话题fixed固定多个数组)
以交错数组byte[][]为例. fixed无法固定byte[][],只能在编译时固定确定数量的变量. 交错数组byte[][]中的每一个byte[]可以采用GCHandle进行固定. int n = ...
- 对称&反对称&完全固定边界条件
ABAQUS Boundary Condition XSYMM 对称边界条件,对称面为与坐标轴1垂直的平面,即U1=UR2=UR3=0; YSYMM 对称边界条件,对称面为与坐标轴2垂直的平面,即U2 ...