ROS学习笔记6-理解主题
本文来源于:http://wiki.ros.org/ROS/Tutorials/UnderstandingTopics
- ROS主题
假设turtlesim节点已经运行,打开一个新终端,使用如下命令运行键盘控制节点$ rosrun turtlesim turtle_teleop_key
则终端会弹出来如下窗口:
表示从键盘读取输入来控制小海龟移动。
将焦点选中到该窗口,即可使用键盘上的方向键来移动小 海龟。
下来我们来分析一下在这背后,发生了什么。
- 理解ROS主题(Topic)
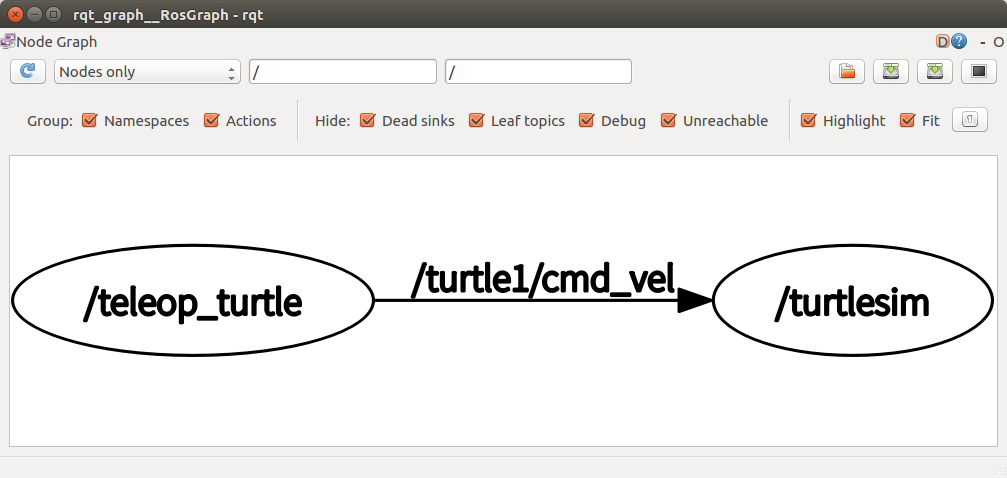
上面有两个节点:turtlesim和turtle_teleop_key,他们通过ROS主题来进行通信。其中,turtle_teleop_key将键盘点击信息发布到消息中,turtlesim节点通过订阅该主题来接收键盘点击信息。- 使用rqt_graph
ROS提供了可视化工具,rqt_graph来查看ROS系统中运行了什么东西。该工具属于rqt_graph包,我们可以通过如下命令安装该包。$ sudo apt-get install ros-<distro>-rqt
$ sudo apt-get install ros-<distro>-rqt-common-plugins其中,distro为ROS发行版本,本教程中使用kinetic版本。
然后在新终端中运行:$ rosrun rqt_graph rqt_graph
则会出现如下界面:
如果将鼠标放在/turtle1/cmd_vel上,则界面中两个椭圆会颜色会发生如下变化:
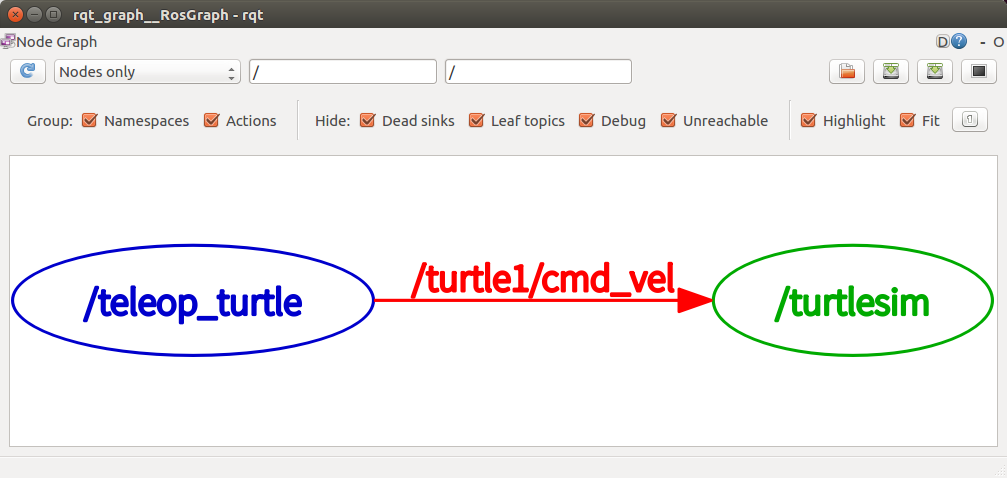
其中,变为红色的主题(Topics),蓝色和绿色的为节点(Nodes),其中蓝色为该主题的发布节点,绿色为该主题的订阅节点。
- rostopic
ROS提供了rostopic命令来查看主题相关的信息。
rostopic有一些子命令,可以使用rostopic -h查看,如下所示: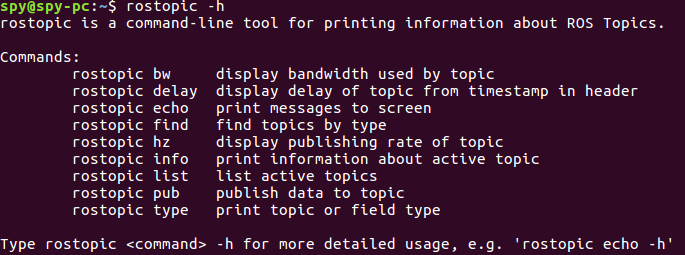
rostopic echo
其中,rostopic echo命令可以打印主题消息。语法如下:rostopic echo [topic]
例如我们之前用rqt_graph查看到一个主题:/turtle1/cmd_vel,我们可以用如下命令来查看该中主题中的消息:
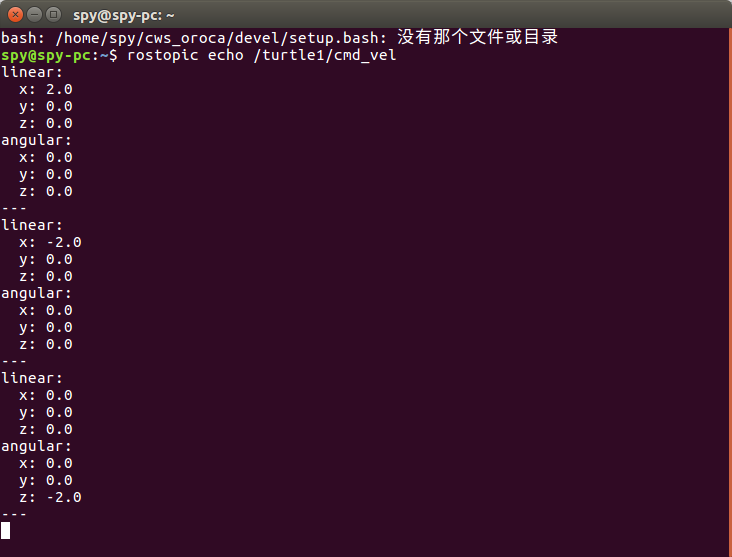
如上图所示,运行了
rostopic echo /turtle1/cmd_vel
之后,将焦点中选中到键盘节点的窗口,点击方向键,则可以打印出该主题的消息内容。
现在如果再运行rqt_graph,则显示如下:
可以看出来多了一个节点来订阅/turtle1/cmd_vel主题,该节点即为rostopic echo节点。
- rostopic list
rostopic list命令可以列出当前订阅或发布的主题,用法如下: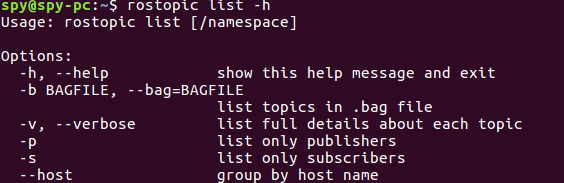
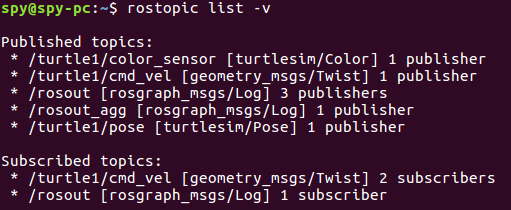
若使用-v选项,则会列出来当前订阅和发布主题的完整信息。
- rostopic type
节点之前通过订阅和发布主题来进行通信,而发送和接收的数据需要是同一类型的消息,通信的内容形式即为消息(Message)。
这些消息的类型可以通过rostopic type命令查看,该命令用法为:rostopic type [topic]
例如,我们可以查看/turtle1/cmd_vel中的消息类型:

该主题的消息类型为:geometry_msgs/Twist。
可以使用如下命令查看该消息类型的数据成员:spy@spy-pc:~$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z可以看出来该消息类型包含两个向量Vector3类型的结构体,分别表示速度和角速度。
- rostopic pub
rostopic pub命令可以直接发布ros主题的消息。该命令用法如下:rostopic pub [topic] [msg_type] [args]
例如:
rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'
该命令表示发布类型为geometry_msgs/Twist的消息到/turtle1/cmd_vel主题,该消息参数为:'[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.8]'表示速度为向前2.0,角速度为1.8,-1表示只发布一次消息。
这组参数使用的是YAML语法,关于该语法的更多信息请参考YAML command line documentation.两个短杠--表示,后面的均是参数,不是选项,以防止解析器解析错误,例如含有符号的参数,如不加区分,解析器可能会按照选项来解析。
在该命令下,小乌龟移动界面如下图所示: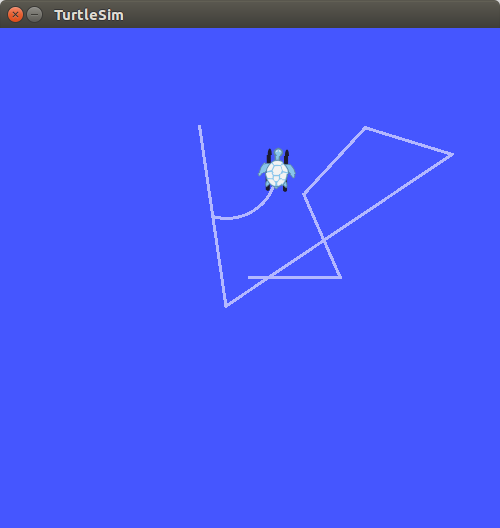
可以看出,小乌龟大约 移动了1/4段圆弧。
为了使小乌龟持续移动,我们需要持续发布该消息,需要加入持续发布消息的频率参数,该参数可以使用-r选项指定,例如使用如下语句:
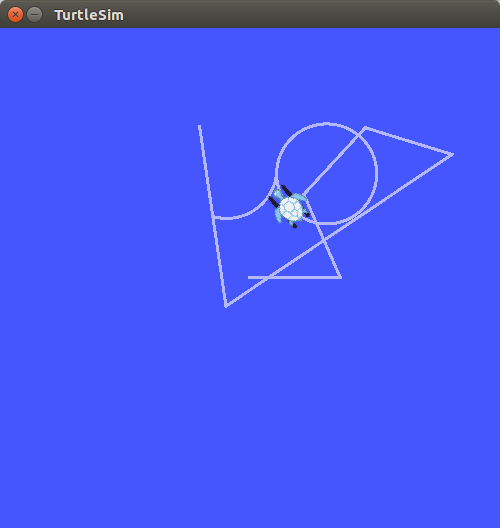
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
就可以让乌龟持续转圈:
再使用rqt_graph查看主题:
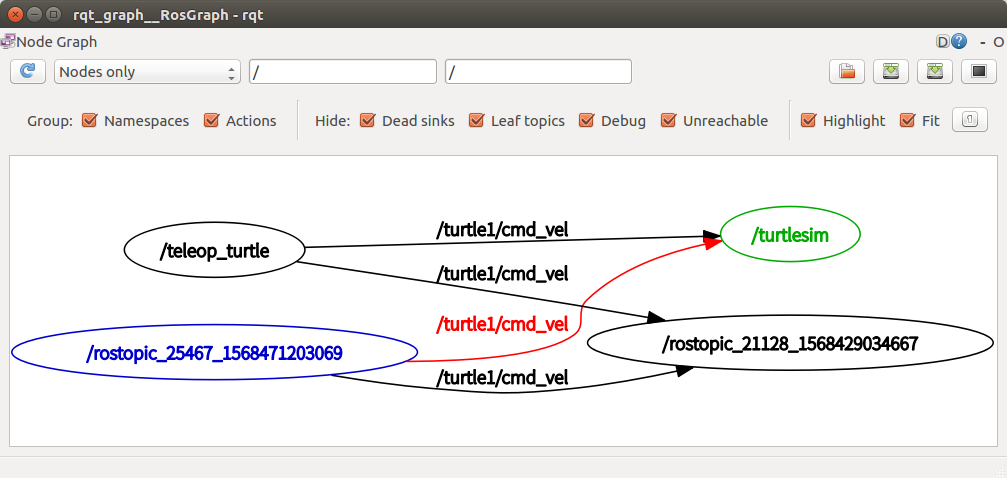
可以看出来多了一个节点来发布/turtle1/cmd_vel主题到/turtlesim节点的。
- 消息数据的可视化
- rostopic hz
rostopic hz命令可以查看一个主题的发布频率,例如:rostopic hz /turtle1/pose
subscribed to [/turtle1/pose]
average rate: 62.485
min: 0.004s max: 0.028s std dev: 0.00250s window: 63
average rate: 62.495
min: 0.004s max: 0.028s std dev: 0.00180s window: 125
average rate: 62.489
min: 0.004s max: 0.028s std dev: 0.00149s window: 188
average rate: 62.495
min: 0.002s max: 0.029s std dev: 0.00181s window: 250
average rate: 62.500
min: 0.002s max: 0.029s std dev: 0.00175s window: 313
average rate: 62.501
min: 0.002s max: 0.029s std dev: 0.00190s window: 375
average rate: 62.501
min: 0.002s max: 0.029s std dev: 0.00176s window: 438
average rate: 62.501
min: 0.002s max: 0.029s std dev: 0.00166s window: 501
average rate: 62.501
min: 0.002s max: 0.029s std dev: 0.00165s window: 563
average rate: 62.502
min: 0.002s max: 0.029s std dev: 0.00175s window: 626
average rate: 62.498
min: 0.002s max: 0.029s std dev: 0.00178s window: 688
average rate: 62.501
min: 0.002s max: 0.029s std dev: 0.00171s window: 751
average rate: 62.498
min: 0.002s max: 0.029s std dev: 0.00165s window: 813
average rate: 62.501
min: 0.002s max: 0.029s std dev: 0.00159s window: 876
average rate: 62.500
min: 0.002s max: 0.029s std dev: 0.00158s window: 938
average rate: 62.499
min: 0.002s max: 0.029s std dev: 0.00153s window: 1001
average rate: 62.499
min: 0.002s max: 0.029s std dev: 0.00149s window: 1064
average rate: 62.500
min: 0.002s max: 0.029s std dev: 0.00147s window: 1126
average rate: 62.499
min: 0.001s max: 0.032s std dev: 0.00161s window: 1189
average rate: 62.499
min: 0.001s max: 0.032s std dev: 0.00162s window: 1251
average rate: 62.499
min: 0.001s max: 0.032s std dev: 0.00159s window: 1314
average rate: 62.501
min: 0.001s max: 0.032s std dev: 0.00155s window: 1376
average rate: 62.500
min: 0.001s max: 0.032s std dev: 0.00152s window: 1439
average rate: 62.500
min: 0.001s max: 0.032s std dev: 0.00149s window: 1501
average rate: 62.500
min: 0.001s max: 0.032s std dev: 0.00147s window: 1564
average rate: 62.500
min: 0.001s max: 0.032s std dev: 0.00145s window: 1627
average rate: 62.499
min: 0.001s max: 0.032s std dev: 0.00142s window: 1689
average rate: 62.500
min: 0.001s max: 0.032s std dev: 0.00140s window: 1752
average rate: 62.444
min: 0.001s max: 0.041s std dev: 0.00155s window: 1813可以看出,turtlesim节点发布的/turtle1/pose主题频率约为62Hz,并且给出了统计特性,最大值,最小值和方差。
- rqt_plot
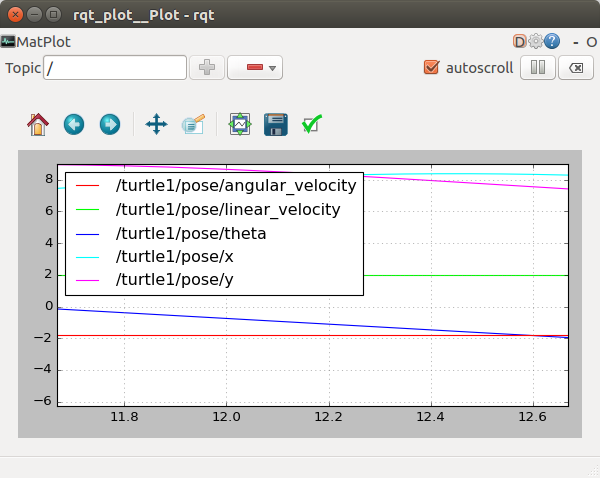
该命令会把消息数据绘图:rosrun rqt_plot rqt_plot
会弹出rqt_plot的界面,然后在界面中Topic后面的文本框中输入主题名,例如输入:/turtle1/pose然后就会显示/turtle1/pose主题中的消息数据曲线。
- rostopic hz
- 使用rqt_graph
ROS学习笔记6-理解主题的更多相关文章
- 微信小程序开发:学习笔记[7]——理解小程序的宿主环境
微信小程序开发:学习笔记[7]——理解小程序的宿主环境 渲染层与逻辑层 小程序的运行环境分成渲染层和逻辑层. 程序构造器
- ROS学习笔记七:在ROS中使用USB摄像头
下面是一些USB摄像头的驱动(大多数摄像头都支持uvc标准): 1 使用软件库里的uvc-camera功能包 1.1 检查摄像头 lsusb ----------------------------- ...
- ROS学习笔记1-引言
该学习笔记参考ROS官方wiki的内容,见:http://wiki.ros.org/ROS/Introduction 什么是ROSROS的全称是Robot Operating System,即机器人操 ...
- ROS学习笔记八:基于Qt搭建ROS开发环境
1 前言 本文介绍一种Qt下进行ROS开发的完美方案,使用的是ros-industrial的Levi-Armstrong在2015年12月开发的一个Qt插件ros_qtc_plugin,这个插件使得Q ...
- Java_JVM学习笔记(深入理解Java虚拟机)___重点
http://chenzhou123520.iteye.com/category/196061 转载 JVM学习笔记(一):运行时数据区 JVM学习笔记(二):JVM中对象访问的两种方式 JVM学习笔 ...
- ROS学习笔记三(理解ROS节点)
要求已经在Linux系统中安装一个学习用的ros软件包例子: sudo apt-get install ros-indigo-ros-tutorials ROS图形概念概述 nodes:节点,一个节点 ...
- ROS学习笔记2-基本概念
本笔记来源于:http://wiki.ros.org/ROS/Concepts ROS文件系统级别文件系统级别主要包含了你能在ROS的磁盘上遇到的资源,包括: 包(Packages):包是ROS中资源 ...
- ROS学习手记 - 5 理解ROS中的基本概念_Services and Parameters
上一节完成了对nodes, Topic的理解,再深入一步: Services and Parameters 我不理解为何 ROS wiki 要把service与parameter放在一起介绍, 很想分 ...
- 学习笔记5——wp主题开发
我觉得学习wordpress插件开发之前还是得先理解一下wp的主题开发,循序渐进才能学好wordpress开发,话不多说,接下来整理一下这两天学习的wordpress主题开发的一些心得和体会,与大家一 ...
随机推荐
- 基于MACVLAN配置VMWARE虚拟机中容器网络
基于MACVLAN配置VMWARE虚拟机中容器网络 测试部环境组 201711 0 文档说明 MACVLAN是docker的一种支持跨主机网络的driver.macvlan本身是linux kerne ...
- ES6:字面量的增强写法
以前对象字面量的写法: 属性的增强写法: ES6中可以写成: 方法的增强写法 ES6中可以写成: ~~~~~ END ~~~~~
- echart中饼状图的高亮显示。
<!DOCTYPE html> <html> <head> <meta charset="utf-8"> <title> ...
- Nexus-VDC(Virtual Device Context)
VDC实际上是将一台物理的Nexus7K设备虚拟为多个逻辑的VDC设备,该术语叫做VDC(Virtual Device Context),该虚拟技术实际上是在一个物理设备架构和内核上运行多个VDC,已 ...
- ElasticSearch学习记录 - 命令示例
GET /searchfilmcomments/searchfilmcomments/_search { "query": { "match_all": {} ...
- 【SSM 】导出excel含图片
ExprotRentUtils package com.kikyo.stat.utils; import java.awt.image.BufferedImage; import java.io.By ...
- linux 镜像备份工具rsnyc
1.本地拷贝文件nohup rsync -avzh /data/wwwroot/xhprof/* /mnt/xhprof/ &2.更改文件夹名称mv /data/wwwroot/xhprof ...
- Sqlserver 日志文件收缩命令
SELECT NAME,recovery_model_desc FROM sys.databases -- 如果是FULL类型,修改为SIMPLE类型 ALTER DATABASE DBName SE ...
- windows破解wifi小技巧
1,首先使用手机某软件破解wifi,手机连上破解的wifi 2,在手机上打开下面界面 3,在电脑上使用二维码识别小工具扫描二维码 4,得到扫面结果 4,得到扫描结果 WIFI:T:WPA;S:DFZJ ...
- 看Web视频整理标签笔记
原来观看web视频,初学html的时候发现记忆不太深刻,所以自己整理了一些笔记,加深记忆且方便忘记时查看.html的规范(遵循)1.一个html文件开始标签和结束标签<html></ ...