ardupilot_gazebo仿真(三)
ardupilot_gazebo仿真(三)
标签(空格分隔): 未分类
创建ROS node 实现对无人机的控制(软件在环)
MAVROS
MAVROS是ROS中的一个能够连接支持MAVLink地面站、支持MAVLink飞控和ROS计算机的工具。
安装MAVROS
Installing MAVROS
安装参照官网即可
sudo apt-get install ros-kinetic-mavros ros-kinetic-mavros-extras
wget https://raw.githubusercontent.com/mavlink/mavros/master/mavros/scripts/install_geographiclib_datasets.sh
chmod a+x install_geographiclib_datasets.sh
./install_geographiclib_datasets.sh
推荐安装rqt
sudo apt-get install ros-kinetic-rqt ros-kinetic-rqt-common-plugins ros-kinetic-rqt-robot-plugins
创建外部控制包
cd ~/catkin_ws/src
catkin_create_pkg offboard roscpp mavros geometry_msgs
这时会在catkin_ws/src目录中生成offboard文件夹,其中包含include和src两个文件夹。我们将offboard_node.cpp放在刚刚生成的offboard/src中。修改offboard目录下的CMakeLists.txt文件,取消一些注释生成相应节点。
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
add_executable(${PROJECT_NAME}_node src/offboard_node.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Specify libraries to link a library or executable target against
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
)
offboard_node.cpp是我们创建的节点的名字。
然后在catkin_ws中,进行编译
cd ~/catkin_ws
catkin_make
source devel/setup.bash
每次要运行节点是都要source setup.bash
启动仿真
01.启动地面站MAVproxy
cd ardupilot/ArduCopter
sim_vehicle.py --map --console
02.launch MAVROS
roslaunch mavros apm.launch
03.运行自己做的外部程序节点
cd catkin_ws/
source devel/setup.bash
rosrun offboard offboard_node
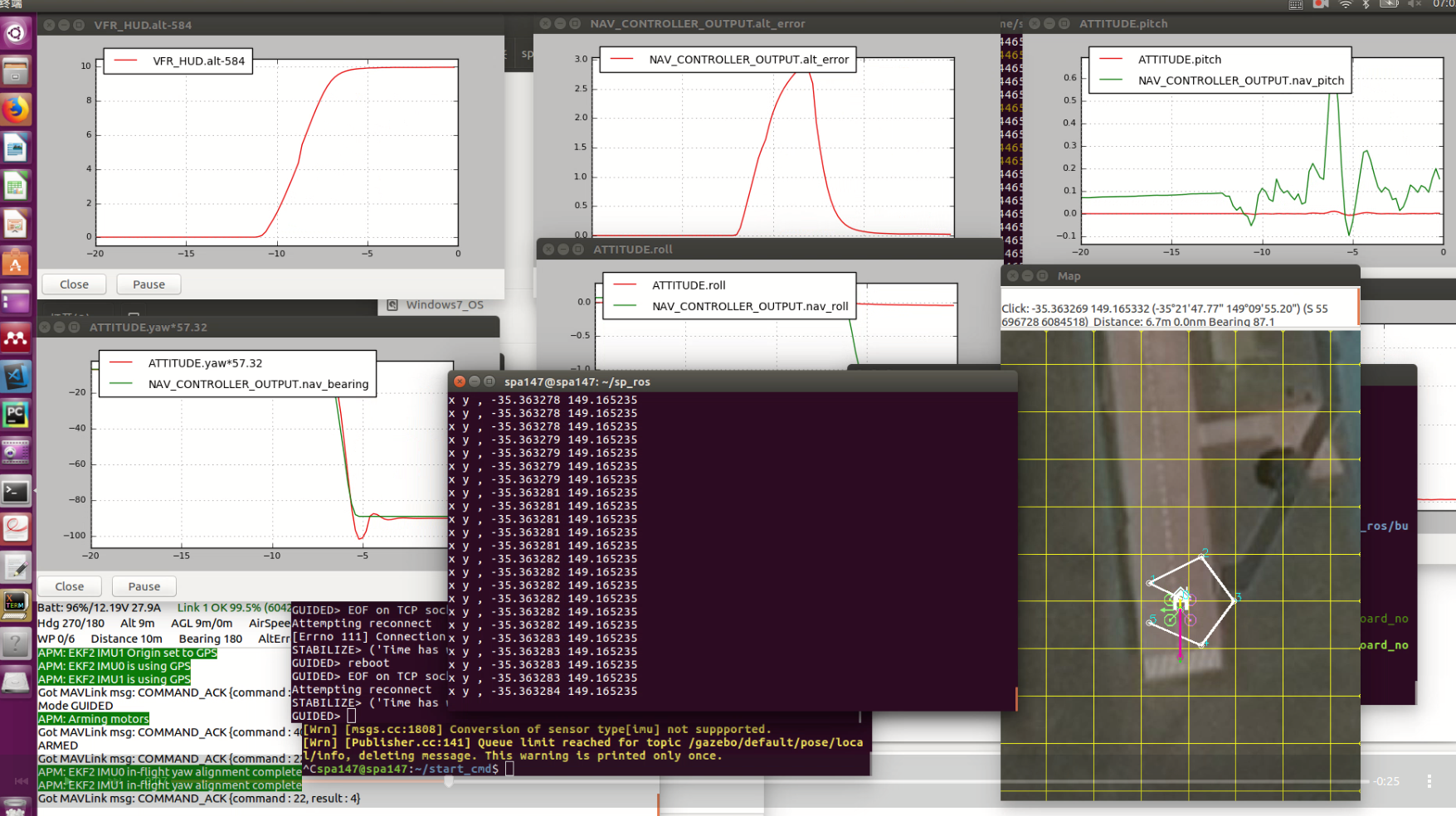
利用graph实时绘制曲线
graph是MAVproxy的一个module
用之前先要load graph
module load graph
常用参数监视
graph NAV_CONTROLLER_OUTPUT.nav_roll ATTITUDE.roll*57.32
graph NAV_CONTROLLER_OUTPUT.nav_pitch ATTITUDE.pitch*57.32
graph NAV_CONTROLLER_OUTPUT.nav_bearing ATTITUDE.yaw*57.32
graph VFR_HUD.alt
graph VFR_HUD.climb
NAV_CONTROLLER_OUTPUT 是期望数据
ATTITUDE 姿态需要乘以57.32变成角度
VFR_HUD.airspeed VFR_HUD.climb VFR_HUD.heading
VFR_HUD.alt VFR_HUD.groundspeed VFR_HUD.throttle
MAVprovxy控制无人机的指令
参考MAVproxy教程,官网给出了较完整的命令集
这里只做最简单的介绍,可以让无人机飞起来。
mode guided
arm throttle
takeoff 40
其中一些飞行模式需要rc 3 在中立的位置,例如alt_hold loiter circle 模式等
rc 3 1500
在地面站还可以对参数进行设置
GUIDED> param show fence*
GUIDED> FENCE_ACTION 1.000000
FENCE_ALT_MAX 100.000000
FENCE_ENABLE 0.000000
FENCE_MARGIN 2.000000
FENCE_RADIUS 150.000000
FENCE_TYPE 3.000000
ardupilot_gazebo仿真(三)的更多相关文章
- ardupilot_gazebo仿真(四)
ardupilot_gazebo仿真(四) 标签(空格分隔): 未分类 Multi-MAV simulation 参考官网给出的multi-vehicle-simulation的方法 在每次打开sim ...
- ardupilot_gazebo仿真(二)
ardupilot_gazebo仿真(二) 标签(空格分隔): 未分类 在模型中添加sensor gezebo官网-sensor部分教程 gezebo官网-基础部分教程 Gazebo plugins ...
- ardupilot_gazebo仿真(一)
ardupilot_gazebo仿真 标签(空格分隔): 未分类 ardupilot_gazebo仿真 官网网址 代码更新地址 Ardupilot Gazebo Plugin & Models ...
- MFC框架仿真<三>R T T I
RTTI,简单的说,就是判定A类是否为B类的基类.将书本的内容最大程度的简化,如下图的类层次,现在解决的问题就是:判定“梨”是否是“红富士”的基类.
- 常见行为:仿真&重力&碰撞&捕捉
一.UIDynamic是从iOS 7开始引入的一种新技术,隶属于UIKit框架.可以认为是一种物理引擎,能模拟和仿真现实生活中的物理现象,重力.弹性碰撞等,游戏开发中很常见,例如愤怒的小鸟. 二.UI ...
- UIDynamic(简单介绍)
一.简单介绍 1.什么是UIDynamic UIDynamic是从iOS 7开始引入的一种新技术,隶属于UIKit框架 可以认为是一种物理引擎,能模拟和仿真现实生活中的物理现象 如:重力.弹性碰撞等现 ...
- iOS开发拓展篇—UIDynamic(简单介绍)
iOS开发拓展篇—UIDynamic(简单介绍) 一.简单介绍 1.什么是UIDynamic UIDynamic是从iOS 7开始引入的一种新技术,隶属于UIKit框架 可以认为是一种物理引擎,能模拟 ...
- 李洪强iOS开发之拓展篇—UIDynamic(简单介绍)
iOS开发拓展篇—UIDynamic(简单介绍) 一.简单介绍 1.什么是UIDynamic UIDynamic是从iOS 7开始引入的一种新技术,隶属于UIKit框架 可以认为是一种物理引擎,能 ...
- iOS开发——UI篇OC篇&UIDynamic详解
iOS开发拓展篇—UIDynamic(简单介绍) 一.简单介绍 1.什么是UIDynamic UIDynamic是从iOS 7开始引入的一种新技术,隶属于UIKit框架 可以认为是一种物理引擎,能模拟 ...
随机推荐
- Android学习笔记_27_多媒体之视频刻录
一.配置文件: <?xml version="1.0" encoding="utf-8"?> <manifest xmlns:android= ...
- jstl 中substring,length等函数用法
引入jstl库:<%@ taglib prefix="fn" uri="http://java.sun.com/jsp/jstl/functions"%& ...
- Angularjs实例4
<!DOCTYPE html><html lang="zh-cn" ng-app=""><head><meta htt ...
- 6.Spring Cloud初相识-------Zool路由
前言: 在生产环境中,我们不可能将每个服务的真实信息暴漏出去,因为这样太不安全. 我们会选择使用路由代理真实的服务信息,由它负责转发给真实的服务. 新建一个Zool: 1.添加依赖 <?xml ...
- c#实现的HTTP服务端
这次在整理一个服务组件的时候,需要涉及到HTTP的请求,HTTP是应用层,建立在TCP之上的.因此,可以用TCP服务端接收HTTP请求,只需要解析请求内容.HTPP有固定的格式,大家可以直接搜索.网上 ...
- POJ 1180 Batch Scheduling (dp,双端队列)
#include <iostream> using namespace std; + ; int S, N; int T[MAX_N], F[MAX_N]; int sum_F[MAX_N ...
- LintCode 7.Serialize and Deserialize Binary Tree(含测试代码)
题目描述 设计一个算法,并编写代码来序列化和反序列化二叉树.将树写入一个文件被称为“序列化”,读取文件后重建同样的二叉树被称为“反序列化”. 如何反序列化或序列化二叉树是没有限制的,你只需要确保可以将 ...
- TCP/IP协议模型详解
TCP
- (转)IP地址分配原理
网络模型介绍 在计算机网络中有著名的OSI七层协议体系结构,概念清楚,理论完整,但是它既复杂又不实用.TCP/IP体系结构则不同,得到的广泛的应用.最终结合OSI和TCP/IP的优点,采用了一种只有五 ...
- R语言绘图:ggplot2绘制ROC
使用ggplot2包绘制ROC曲线 rocplot<- function(pred, truth, ...){ predob<- prediction(pred, truth) #打印AU ...