Bounding-box 回归
R-CNN系列均训练了Bounding-box回归器来对窗口进行校正,其目标是学习一种转换关系将预测得到的窗口P映射为真实窗口G(Ground truth).
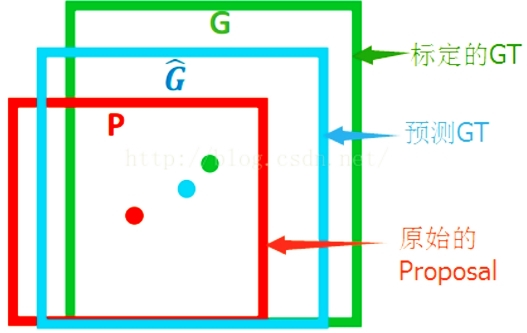
变换方式
可以通过简单的仿射变换以及指数变换将当前预测出的Bounding-box P向Ground truth纠正:
\[
\begin{cases}
\widehat{G_x}=P_wd_x(P)+P_x \\
\widehat{G_y}=P_hd_y(P)+P_y
\end{cases} \tag{仿射}
\]
\[
\begin{cases}
\widehat{G_w}=P_we^{d_w(P)} \\
\widehat{G_h}=P_he^{d_h(P)}
\end{cases}\tag{尺度缩放}
\]
其中(x,y)是区域的中心点坐标,(w,h)是宽和高.
注意:只有当Proposal和Ground Truth比较接近时(线性问题),我们才能将其作为训练样本训练我们的线性回归模型.RCNN计算预测的Proposal与多个Ground Truth的IoU,如果没有任何重叠(IoU=0),则忽略这个Proposal不加入训练;将最大IoU对应的窗口作为Proposal"最近"的Ground Truth,如果此最大的IoU小于阈值(如0.6)也忽略掉.
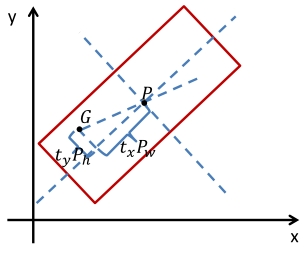
通过上述\(\widehat G - P\)公式可计算出需要学习的目标target:
\[
\begin{cases}
t_x = (G_x− P_x)/P_w \\
t_y = (G_y− P_y)/P_h \\
t_w = \log(G_w/P_w) \\
t_h = \log(G_h/P_h)
\end{cases}
\]
带L2正则项的(ridge regression)目标函数为:
\[
w_*= \text{argmin}_{\hat w_*}\sum_i^N(t^i_*-s^i_*)^2+\lambda\|\hat w_*\|^2
\]
其中\(s^i_*=\hat w_*^T\phi(P^i)\) ,而\(w_*\)是可学习的参数,\(\phi\)是CNN中某一层的特征.
目标函数除了计算差方和的方式还可以是smooth L1.
加旋转角度
对于船只等目标,通常是长条形且在图片中呈倾斜状态,对其进行一定程度的旋转可能能取得更好的效果。因此可以同时在训练集、预测值、损失函数中加入旋转角度。参考论文"A High Resolution Optical Satellite Image Dataset for Ship Recognition and Some New Baselines" (ICPRAM 2017,Zikun Liu,Yiping Yang),"Rotated Region Based CNN for Ship Detection"(Zikun Liu,ICIP 2017)
在预测的proposal中加入旋转角度\(\theta=P_a\),得到:
\[
\begin{cases}
t_x = (G_x− P_x)/(P_w\cosθ+P_h\sin|θ|) \\
t_y = (G_y− P_y)/(P_w\sin|θ|+P_h\cosθ) \\
t_w = \log(G_w/P_w) \\
t_h = \log(G_h/P_h) \\
ta= (G_a−P_a)/(λ180)
\end{cases}
\]
λ是个常数(λ = 0.5)。
在上式中求\(t_x,t_y\)时旋转映射不稳定,可以替换为如下方式,先映射再直接对宽和高进行normalize。
\[
\begin{cases}
t_x = (\cosα(G_x− P_x) + \sinα(G_y− P_y))/P_w \\
t_y = (−\sinα(G_x− P_x) + \cosα(G_y− P_y))/P_h
\end{cases}
\]
scale-invariant translation (SIT)的示例图:
Bounding-box 回归的更多相关文章
- Bounding Box回归
简介 Bounding Box非常重要,在rcnn, fast rcnn, faster rcnn, yolo, r-fcn, ssd,到今年cvpr最新的yolo9000都会用到. 先看图 对于上图 ...
- [转载]边框回归(Bounding Box Regression)
[转载]边框回归(Bounding Box Regression) 许多模型中都应用到了这种方法来调整piror使其和ground truth尽量接近,例如之前自己看过的SSD模型 这篇文章写的很好, ...
- bounding box的简单理解
1. 小吐槽 OverFeat是我看的第一篇深度学习目标检测paper,因为它是第一次用深度学习来做定位.目标检测问题.可是,很难懂...那个bounding box写得也太简单了吧.虽然,很努力地想 ...
- 论文阅读笔记四十七:Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression(CVPR2019)
论文原址:https://arxiv.org/pdf/1902.09630.pdf github:https://github.com/generalized-iou 摘要 在目标检测的评测体系中,I ...
- 目标检测中bounding box regression
https://zhuanlan.zhihu.com/p/26938549 RCNN实际包含两个子步骤,一是对上一步的输出向量进行分类(需要根据特征训练分类器):二是通过边界回归(bounding-b ...
- 目标检测中的bounding box regression
目标检测中的bounding box regression 理解:与传统算法的最大不同就是并不是去滑窗检测,而是生成了一些候选区域与GT做回归.
- Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression
Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression 2019-05-20 19:3 ...
- [论文笔记] Improving Head Pose Estimation with a Combined Loss and Bounding Box Margin Adjustment
Improving Head Pose Estimation with a Combined Loss and Bounding Box Margin Adjustment 简介 本文提出了一种网络结 ...
- 3D空间中的AABB(轴向平行包围盒, Aixe align bounding box)的求法
引言 在前面的一篇文章中讲述了怎样通过模型的顶点来求的模型的包围球,而且还讲述了基本包围体除了包围球之外,还有AABB包围盒.在这一章,将讲述怎样依据模型的坐标求得它的AABB盒. 表示方法 AABB ...
- Latex 中插入图片no bounding box 解决方案
在windows下,用latex插入格式为jpg,png等图片会出现no bounding box 的编译错误,此时有两个解决办法: 1.将图片转换为eps格式的图片 \usepackage{grap ...
随机推荐
- 排序算法(Java实现)
这几天一直在看严蔚敏老师的那本<数据结构>那本书.之前第一次学懵懵逼逼,当再次看的时候,发觉写的是非常详细,非常的好. 那就把相关的排序算法用我熟悉的Java语言记录下来了.以下排序算法是 ...
- java2 - 语言基础
一.结构流程图制作工具 xmind 的使用 二.Java 基础数据类型 回答以下问题: java 基本数据类型有几种? 整数类型是哪几种? 浮点数类型是哪几种? 字符类型关键字? 布尔类型关键字? 为 ...
- Yii2数据库操作再总结
User::find()->all(); 此方法返回所有数据:User::findOne($id); 此方法返回 主键 id=1 的一条数据(举个例子): User::find()->wh ...
- Yii高级模板的安装
1,如果你使用composer来安装的话,执行下边两条命令. composer global require "fxp/composer-asset-plugin:^1.2.0" ...
- Spring boot 整合mybatis
第一步:创建maven项目并添加spring boot依赖: <project xmlns="http://maven.apache.org/POM/4.0.0" xmlns ...
- java字符串以及字符类型基础
介绍一下java字符集和字符的编码方式, 首先要区分一下字符集和字符编码.所谓的字符集 类似于unicode,GB2312,GBK,ASCII等等.因为一开始只有26个英文字母需要 编一下号.所有用下 ...
- iOS开发引入第三方类库的问题
在开发iOS程序的过程中,通常在导入第三方的类库(.a/.o)文件会报出一系列的错误: Undefined symbols for architecture i386: "std::stri ...
- Docker容器技术
Docker介绍 什么是容器 Linux容器是与系统其他部分隔离开的一系列进程,从另一个系统镜像运行,并由该镜像提供支持进程所需的全部文件. 容器镜像包含了应用的所有依赖项,因而在从开发到测试再到生产 ...
- (转载)SVM-基础(一)
支持向量机: Maximum Margin Classifier by pluskid, on 2010-09-08, in Machine Learning 87 comments 本文是 ...
- ElasticSearch AggregationBuilders java api常用聚会查询
以球员信息为例,player索引的player type包含5个字段,姓名,年龄,薪水,球队,场上位置.index的mapping为: "mappings": { "pl ...