RealSenseD435的一些参数整理
一、深度相机D435
二、自校准功能
https://www.intelrealsense.com/self-calibration-for-depth-cameras/
https://dev.intelrealsense.com/docs/self-calibration-for-depth-cameras?_ga=2.3349108.557786983.1670234972-1459684402.1670234972
具体怎么校准的看上面第二条链接
这个数字是设备校准健康状况的完整指示,可以随着时间的推移进行跟踪。自校准功能还允许您以最快 0.6 秒的速度运行重新校准——相机深度可以在不到一秒的时间内恢复到近乎完美的性能。由于不需要目标、方格图案墙或复杂的设置(如相机的特定运动路径)或相机静止的需要,自校准非常简单,只需调用片上函数即可。
三、技术规格
https://www.intelrealsense.com/depth-camera-d435/
https://www.intelrealsense.com/wp-content/uploads/2022/11/Intel-RealSense-D400-Series-Datasheet-November-2022.pdf
特征
- 使用环境:室内/室外
- 理想范围:0.3至3m
深度相机
- 深度技术:立体最大分辨率下的
- 深度视野(FOV):87度x58度
- 最小深度距离(Min-Z):~28cm
- 深度输出分辨率:高达1280x720
- 深度精度:< 2% at 2m^1
- 深度帧率:高达90 fps
- 图像传感器技术:全局快门
RGB相机
- RGB帧分辨率:1920x1080
- RGB传感器视野FOV(HxV):69度x42度
- RGB帧率:30fps
- RGB传感器分辨率:2Mp
- RGB传感器技术:Rolling Shutter
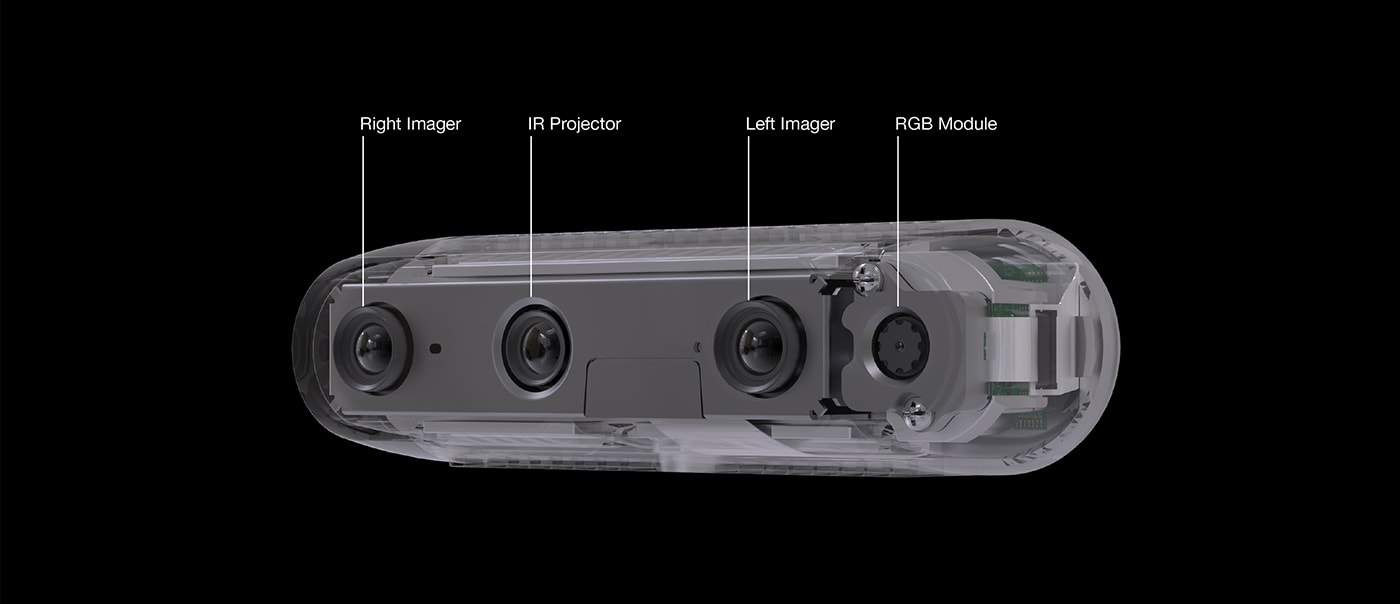
主要成分
- 摄像头模组:Intel RealSense Module D430 + RGB Camera
- 视觉处理器板:Intel RealSense Vision Processor D4
尺寸
- 长深高:90mmx25mmx25mm
- 安装机制:一个1/4-20 UNC 螺纹安装点、两个M3螺纹安装点
四、开发者中心
https://www.intelrealsense.com/developers/
realSense的文档:https://dev.intelrealsense.com/docs?_ga=2.32783866.557786983.1670234972-1459684402.1670234972
API How to:https://dev.intelrealsense.com/docs/api-how-to
API 文档:https://intelrealsense.github.io/librealsense/doxygen/annotated.html
SDK 2.0 例程:https://dev.intelrealsense.com/docs/code-samples
使用PCL例程:https://dev.intelrealsense.com/docs/pcl-wrapper
opencv配套例程:https://dev.intelrealsense.com/docs/pcl-wrapper
RealSenseD435的一些参数整理的更多相关文章
- $_SERVER的详细参数整理下
PHP编程中经常需要用到一些服务器的一些资料,特把$_SERVER的详细参数整理下,方便以后使用. $_SERVER['PHP_SELF'] #当前正在执行 脚本的文件名,与 document roo ...
- String格式化参数整理
Java String格式话参数整理如下: conversion:转换格式,可选的格式有: d 整数型(十进制) c Unicode字符 b Boolean值 s String f 浮点数(十进制) ...
- hadoop作业调优参数整理及原理
hadoop作业调优参数整理及原理 10/22. 2013 1 Map side tuning参数 1.1 MapTask运行内部原理 当map task开始运算,并产生中间数据时,其产生的中间结果并 ...
- Hbase集群搭建及所有配置调优参数整理及API代码运行
最近为了方便开发,在自己的虚拟机上搭建了三节点的Hadoop集群与Hbase集群,hadoop集群的搭建与zookeeper集群这里就不再详细说明,原来的笔记中记录过.这里将hbase配置参数进行相应 ...
- Win32 API中的user32.dll中的ShowWindow方法参数整理
在使用ShowWindow方法来设置窗体的状态时,由于不知道参数值,用起来非常容易混乱,所以整理了以下其参数的枚举值,方便以后的的使用. public class User32API { #reg ...
- JVM性能调优2:JVM性能调优参数整理
序号 参数名 说明 JDK 默认值 使用过 1 JVM执行模式 2 -client-server 设置该JVM运行与Client 或者Server Hotspot模式,这两种模式从本质上来说是在JVM ...
- HttpWebRequest上传多文件和多参数——整理
1.整理HttpWebRequest上传多文件和多参数.较上一个版本,更具普适性和简易型.注意(服务方web.config中要配置)这样就可以上传大文件了 <system.webServer&g ...
- MySQL 8.0部分弃用的参数整理
最近整理了一下MySQL 8.0的自动化安装,其中用到了一个MySQL 5.7版本的自定义配置文件,由于没有对(MySQL 8.0)做针对性修改,导致安装过程中出现了一些错误其中部分原因就是MySQL ...
- 多线程用this指针来传递参数(整理)
整理自CSDN的论坛中,地址:https://bbs.csdn.net/topics/390703249 1.不同的线程不是两个独立的程序:线程不是进程(process是你说的程序) 2.线程函数必须 ...
- goldengate一些参数整理
转自:http://blog.csdn.net/lemontree1123/article/details/46603549 manager参数: AUTOSTART:指定在mgr启动时自动启动那些进 ...
随机推荐
- JAVA虚拟机09---垃圾回收---经典垃圾回收器
1.Serial收集器 1.1简介 Serial收集器是最基础.历史最悠久的收集器,曾经(在JDK 1.3.1之前)是HotSpot虚拟机新生代收集器的唯一选择 1.2使用算法 标记-复制算法 1 ...
- Requset02
其他功能: 1. 获取请求参数通用方式:不论get还是post请求方式都可以使用下列方法来获取请求参数 1. String getParameter(String name):根据参数名称获取参数值 ...
- JZOJ 7392. 【2021.11.17NOIP提高组联考】数 (ds)
\(\text{Problem}\) 元素带类型与权值,每次修改权值或类型,求区间每种类型和的 \(k\) 次方和 强制在线 \(\text{Solution}\) 显然简单分块,根据询问需要发现要 ...
- Cobalt Strike 之:会话管理
郑重声明: 本笔记编写目的只用于安全知识提升,并与更多人共享安全知识,切勿使用笔记中的技术进行违法活动,利用笔记中的技术造成的后果与作者本人无关.倡导维护网络安全人人有责,共同维护网络文明和谐. Co ...
- python爬取网页的多种方式以及保存方法
爬取网页信息并保存 bs4和lxml都是用来将接收的数据解析html 1.bs4+excel(openpyxl): import requests from bs4 import BeautifulS ...
- 从 B 站出发,用 Chrome devTools performance 分析页面如何渲染
页面是如何渲染的?通常会得到"解析 HTML.css 合成 Render Tree,就可以渲染了"的回答.但是具体都做了些什么,却很少有人细说,我们今天就从 Chrome 的性能工 ...
- XShell 连接 VMware Linux
如果你的系统是 Ubuntu,并且是精简安装的系统,极大可能使用ifconfig时会提示你安装相关依赖,所以你安装的时候要记得顺带安装 ifconfig: sudo apt install ifcon ...
- PostGIS之地理坐标
1. 概述 PostGIS 是PostgreSQL数据库一个空间数据库扩展,它添加了对地理对象的支持,允许在 SQL 中运行空间查询 PostGIS官网:About PostGIS | PostGIS ...
- [网鼎杯2020]boom
[网鼎杯2020]boom 分析 感觉比较友善,主要考查数学运算. 解析 解压之后发现是个exe文件,运行得到一个md5 查询: 输入明文得到: 下个挑战是解三元一次方程: 拿matlab算一下. s ...
- CLIP改进工作串讲(上)学习笔记
看了跟李沐学AI系列朱毅老师讲的CLIP改进工作串讲,这里记录一下. 1.分割 分割的任务其实跟分类很像,其实就是把图片上的分类变成像素级别上的分类,但是往往图片上能用的技术都能用到像素级别上来.所以 ...