three.js 欧拉角和四元数
这篇郭先生就来说说欧拉角和四元数,欧拉角和四元数的优缺点是老生常谈的话题了,使用条件我就不多说了,我只说一下使用方法。
1. 欧拉角(Euler)
欧拉角描述一个旋转变换,通过指定轴顺序和其各个轴向上的指定旋转角度来旋转一个物体。下面我们开看看它的方法
1. set( x: number, y: number, z: number, order?: string ): Euler
x - 用弧度表示x轴旋转量。y - 用弧度表示y轴旋转量。z - 用弧度表示z轴旋转量。order - (optional) 表示旋转顺序的字符串。设置该欧拉变换的角度和旋转顺序 order。
2. clone(): this
返回一个与当前参数相同的新欧拉角。
3. copy( euler: Euler ): this
将 euler 的属性拷贝到当前对象。
4. setFromRotationMatrix( m: Matrix4, order?: string ): Euler
m - Matrix4 矩阵上面的3x3部分是一个纯旋转矩阵rotation matrix (也就是不发生缩放)order - (可选参数) 表示旋转顺序的字符串。使用基于 order 顺序的纯旋转矩阵来设置当前欧拉角。
var vector = new THREE.Vector3(0,0,1);
var matrix = new THREE.Matrix4().makeRotationAxis(vector, Math.PI/6)
var euler = new THREE.Euler().setFromRotationMatrix(matrix); // 返回Euler {_x: -0, _y: 0, _z: 0.5235987755982987, _order: "XYZ"}
5. setFromQuaternion( q: Quaternion, order?: string ): Euler
根据 order 指定的方向,使用归一化四元数设置这个欧拉变换的角度。
var vector = new THREE.Vector3(0,0,1);
var quaternion = new THREE.Quaternion().setFromAxisAngle(vector, Math.PI/6)
var euler = new THREE.Euler().setFromQuaternion(quaternion);// 返回Euler {_x: -0, _y: 0, _z: 0.5235987755982987, _order: "XYZ"}结果同上
6. setFromVector3( v: Vector3, order?: string ): Euler
设置 x, y and z 并且选择性更新 order。
var vector = new THREE.Vector3(0,0,Math.PI/6);
var euler = new THREE.Euler().setFromVector3(vector);/ 返回Euler {_x: -0, _y: 0, _z: 0.5235987755982987, _order: "XYZ"}结果同上
7. reorder( newOrder: string ): Euler
通过这个欧拉角创建一个四元数,然后用这个四元数和新顺序设置这个欧拉角。
8. equals( euler: Euler ): boolean
检查 euler 是否与当前对象相同。
9. fromArray( xyzo: any[] ): Euler
长度为3或4的一个 array 。array[3] 是一个可选的 order 参数。将欧拉角的x分量设置为 array[0]。将欧拉角的x分量设置为 array[1]。将欧拉角的x分量设置为 array[2]。将array[3]设置给欧拉角的 order 。可选。
10. toArray( array?: number[], offset?: number ): number[]
返回一个数组:[x, y, z, order ]。
11. toVector3( optionalResult?: Vector3 ): Vector3
以 Vector3 的形式返回欧拉角的 x, y 和 z。
var vector = new THREE.Vector3(0,0,Math.PI/6);
var euler = new THREE.Euler().setFromVector3(vector);
euler.toVector3(); //返回Vector3 {x: 0, y: 0, z: 0.5235987755982988}
2. 四元数
四元数对象Quaternion使用x、y、z和w四个分量表示。在三维空间中一个旋转由一个旋转轴、一个旋转角度和旋转方向来唯一确定。
假设我们默认为右手法则的旋转,则旋转方向为逆时针,旋转轴向量为v = (vx, vy, vz), 角度为旋转角度,那么该旋转就应该类似如下图所示:
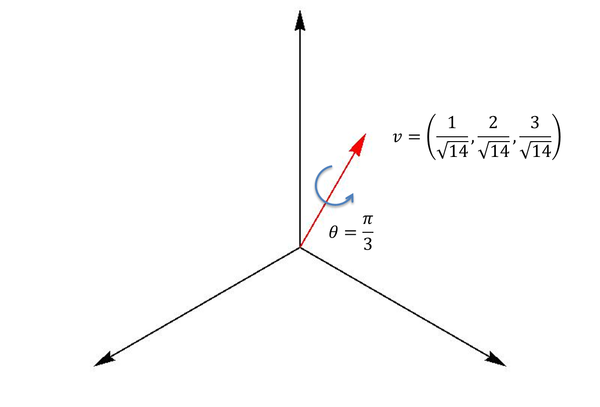
其对应的四元数就是:

1. set( x: number, y: number, z: number, w: number ): Quaternion
设置该四元数的值。
2. clone(): this
克隆此四元数。
3. copy( q: Quaternion ): this
将q的值复制到这个四元数。
4. setFromEuler( euler: Euler ): Quaternion
用欧拉角指定的旋转来设置此四元数。
var euler = new THREE.Euler(0,0,Math.PI/6);
var quaternion = new THREE.Quaternion().setFromEuler(euler) //返回Quaternion {_x: 0, _y: 0, _z: 0.25881904510252074, _w: 0.9659258262890683}
5. setFromAxisAngle( axis: Vector3, angle: number ): Quaternion
使用由轴和角度指定的旋转来设置此四元数。axis 应该是归一化的,angle 的单位是弧度。
var vector1 = new THREE.Vector3(0,0,1);
var vector2 = new THREE.Vector3(0,0,2);
var quaternion1 = new THREE.Quaternion().setFromAxisAngle(vector1, Math.PI/6); //返回Quaternion {_x: 0, _y: 0, _z: 0.25881904510252074, _w: 0.9659258262890683}
var quaternion2 = new THREE.Quaternion().setFromAxisAngle(vector2, Math.PI/6); //返回Quaternion {_x: 0, _y: 0, _z: 0.5176380902050415, _w: 0.9659258262890683}
可见axis是否归一化对四元数的x、y和z值的影响是线性的。
6. setFromRotationMatrix( m: Matrix4 ): Quaternion
从m的旋转分量来设置该四元数。使用很简单就不多说了。
7. setFromUnitVectors( vFrom: Vector3, vTo: Vector3 ): Quaternion
通过从向量vFrom到vTo所需的旋转来设置这四元数。vFrom 和 vTo 应该是归一化的。我们来看一下
var vector1 = new THREE.Vector3(1,1,0);
var vector2 = new THREE.Vector3(0,1,0);
var quaternion = new THREE.Quaternion().setFromUnitVectors(vector1, vector2); //相当于绕z轴旋转了Math.PI/4
8. angleTo( q: Quaternion ): number
返回这个四元数到q的角度
var quaternion1 = new THREE.Quaternion().setFromEuler(new THREE.Euler(0,0,Math.PI/3));
var quaternion2 = new THREE.Quaternion().setFromEuler(new THREE.Euler(0,0,Math.PI/6));
quaternion1.angleTo(quaternion2); // 返回0.5235987755982987
9. rotateTowards( q: Quaternion, step: number ): Quaternion
将此四元数按给定的step旋转到定义的四元数q。该方法确保最终四元数不会超出q。那么是什么意思呢?
var quaternion1 = new THREE.Quaternion().setFromEuler(new THREE.Euler(0,0,Math.PI/3)); //{_x: 0, _y: 0, _z: 0.49999999999999994, _w: 0.8660254037844387}
var quaternion2 = new THREE.Quaternion().setFromEuler(new THREE.Euler(0,0,Math.PI/6)); //{_x: 0, _y: 0, _z: 0.25881904510252074, _w: 0.9659258262890683}
quaternion1.rotateTowards( quaternion2, 0); //{_x: 0, _y: 0, _z: 0.49999999999999994, _w: 0.8660254037844387}
quaternion1.rotateTowards( quaternion2, 0.5); //{_x: 0, _y: 0, _z: 0.2701980971440553, _w: 0.9628047508709812}
quaternion1.rotateTowards( quaternion2, 1); //{_x: 0, _y: 0, _z: 0.25881904510252074, _w: 0.9659258262890683}
可以看出其内部使用了quaternion.slerp()方法。当step为0时,rotateTowards方法返回就是当前四元数。当step为1时,rotateTowards方法返回就是参数q的四元数。当step为0~1之间时,rotateTowards方法返回就是当前四元数和参数q的四元数之间的插值。
10. inverse(): Quaternion
转置此四元数-计算共轭。假设四元数具有单位长度。
var quaternion = new THREE.Quaternion().setFromEuler(new THREE.Euler(Math.PI/6,Math.PI/6,Math.PI/6)); //初始四元数Quaternion {_x: 0.30618621784789724, _y: 0.17677669529663687, _z: 0.30618621784789724, _w: 0.8838834764831845}
quaternion.inverse(); //返回Quaternion {_x: -0.30618621784789724, _y: -0.17677669529663687, _z: -0.30618621784789724, _w: 0.8838834764831845}
由此可知计算共轭之后,x、y和z分别取复制,而w值不变。
11. conjugate(): Quaternion
返回此四元数的旋转共轭。四元数的共轭。表示旋转轴在相反方向上的同一个旋转。经过我的测试这个方法和inverse()方法是一样的,来看看inverse的源码
inverse: function () {
// quaternion is assumed to have unit length
return this.conjugate();
},
12. dot( v: Quaternion ): number
计算四元数v和当前四元数的点积。众所周知点积得到的是一个数字。很简单
13. lengthSq(): number
计算四元数的平方长度。就是各个值平方求和。
14 length(): number
计算此四元数的长度。也就是各个值平方求和,然后在开根号。
15. normalize(): Quaternion
归一化该四元数。开看下源码
normalize: function () {
var l = this.length();
if ( l === 0 ) { //如果四元数参length为0,那么this._x、this._y和this._z都设置为0,this._w设置为1
this._x = 0;
this._y = 0;
this._z = 0;
this._w = 1;
} else { //如果四元数参length为l,那么四元数的各个参数乘以l的倒数。
l = 1 / l;
this._x = this._x * l;
this._y = this._y * l;
this._z = this._z * l;
this._w = this._w * l;
}
return this;
},
16. multiply( q: Quaternion ): Quaternion
把该四元数和q相乘。具体怎么相乘。稍后再说。
17. premultiply( q: Quaternion ): Quaternion;
使用q左乘以(pre-multiply)该四元数。同样稍后再说。
18. multiplyQuaternions( a: Quaternion, b: Quaternion ): Quaternion
四元数a乘以四元数b,我们说一下四元数的乘法。
multiplyQuaternions: function ( a, b ) {
var qax = a._x, qay = a._y, qaz = a._z, qaw = a._w;
var qbx = b._x, qby = b._y, qbz = b._z, qbw = b._w;
this._x = qax * qbw + qaw * qbx + qay * qbz - qaz * qby;
this._y = qay * qbw + qaw * qby + qaz * qbx - qax * qbz;
this._z = qaz * qbw + qaw * qbz + qax * qby - qay * qbx;
this._w = qaw * qbw - qax * qbx - qay * qby - qaz * qbz;
return this;
},
19. equals( v: Quaternion ): boolean;
比较v和这个四元数的各个分量,以确定两者是否代表同样的旋转。不多说。
20. slerp( qb: Quaternion, t: number ): Quaternion
处理四元数之间的球面线性插值。t 代表quaternionA(这里t为0)和quaternionB(这里t为1)这两个四元数之间的旋转量。quaternion 被设置为结果。rotateTowards的底层同样使用了slerp方法。
var quaternion1 = new THREE.Quaternion().setFromEuler(new THREE.Euler(0,0,Math.PI/6));
var quaternion2 = new THREE.Quaternion().setFromEuler(new THREE.Euler(0,0,Math.PI/2));
quaternion1; //quaternion1的值为{_x: 0, _y: 0, _z: 0.25881904510252074, _w: 0.9659258262890683}
quaternion2; //quaternion2的值为{_x: 0, _y: 0, _z: 0.7071067811865475, _w: 0.7071067811865476}
quaternion1.slerp(quaternion2, 0) //返回的结果和quaternion1相同
quaternion1.slerp(quaternion2, 1) //返回的结果和quaternion2相同
quaternion1.slerp(quaternion2, 其他值) //返回quaternion1到quaternion2的插值,当然这个t也是可以大于1的
//看一下rotateTowards的部分源码
rotateTowards: function ( q, step ) {
var angle = this.angleTo( q );
if ( angle === 0 ) return this;
var t = Math.min( 1, step / angle );
this.slerp( q, t );
return this;
}
21. static slerp: functistatic slerp(qa: Quaternion, qb: Quaternion, qm: Quaternion, t: number): Quaternionon
这是slerp的静态方法,无需动态设置。同样使用了slerp方法。
slerp: function ( qa, qb, qm, t ) {
return qm.copy( qa ).slerp( qb, t );
}
关于欧拉角四元数要说的差不多就这些,还需要平时多多应用才能记熟。
转载请注明地址:郭先生的博客
three.js 欧拉角和四元数的更多相关文章
- 【3D计算机图形学】变换矩阵、欧拉角、四元数
[3D计算机图形学]变换矩阵.欧拉角.四元数 旋转矩阵.欧拉角.四元数主要用于:向量的旋转.坐标系之间的转换.角位移计算.方位的平滑插值计算. 一.变换矩阵: 首先要区分旋转矩阵和变换矩阵: 旋转 ...
- matlab练习程序(旋转矩阵、欧拉角、四元数互转)
欧拉角转旋转矩阵公式: 旋转矩阵转欧拉角公式: 旋转矩阵转四元数公式,其中1+r11+r22+r33>0: 四元数转旋转矩阵公式,q0^2+q1^2+q2^2+q3^2=1: 欧拉角转四元数公式 ...
- Unity复杂的旋转-欧拉角和四元数
一.欧拉角欧拉角最容易表示,用三个变量X,Y,Z可以直观的表示绕着某个轴的旋转角度. 在Unity里就是Transform组件的Rotation里的X Y Z三个变量代表了欧拉角 二.四元数四元数相比 ...
- Matrix4x4矩阵变换、欧拉角转四元数、角度转弧度
Matrix4x4 // 重置矩阵 ][]) { m[][] = ; m[][] = ; m[][] = ; m[][] = ; m[][] = ; m[][] = ; m[][] = ; m[][] ...
- 3D数学基础:四元数与欧拉角之间的转换
在3D图形学中,最常用的旋转表示方法便是四元数和欧拉角,比起矩阵来具有节省存储空间和方便插值的优点.本文主要归纳了两种表达方式的转换,计算公式采用3D笛卡尔坐标系: 单位四元数可视化为三维矢量加上第四 ...
- 四元数与欧拉角(RPY角)的相互转换
RPY角与Z-Y-X欧拉角 描述坐标系{B}相对于参考坐标系{A}的姿态有两种方式.第一种是绕固定(参考)坐标轴旋转:假设开始两个坐标系重合,先将{B}绕{A}的X轴旋转$\gamma$,然后绕{A} ...
- 四元数(Quaternion)和旋转 +欧拉角
四元数介绍 旋转,应该是三种坐标变换--缩放.旋转和平移,中最复杂的一种了.大家应该都听过,有一种旋转的表示方法叫四元数.按照我们的习惯,我们更加熟悉的是另外两种旋转的表示方法--矩阵旋转和欧拉旋转. ...
- eigen 中四元数、欧拉角、旋转矩阵、旋转向量
一.旋转向量 1.0 初始化旋转向量:旋转角为alpha,旋转轴为(x,y,z) Eigen::AngleAxisd rotation_vector(alpha,Vector3d(x,y,z)) 1. ...
- 三维空间旋转和Three.JS中的实现
三维空间中主要有两种几何变换,一种是位置的变换,位置变换和二维空间的是一样的.假设一点P(X1,Y1,Z1) 移动到Q(X2,Y2,Z2)只要简单的让P点的坐标值加上偏移值就可以了.但是三维空间的旋转 ...
随机推荐
- 实战笔记丨JDBC问题定位指南
JDBC(Java数据库连接性)是Java API,用于管理与数据库的连接,发出查询和命令以及处理从数据库获得的结果集.JDBC在1997年作为JDK 1.1的一部分发布,是为Java持久层开发的首批 ...
- html+css快速入门教程(5)
练习: 1.画盒子1 2.画盒子2 3.京东特色购物 4.京东发现好货 5.京东玩3c 7.3 定位 通过使用 position 属性,我们可以选择 3 种不同类型的定位,这会影响元素框生成的方式. ...
- GIT更换连接方式
1-使用 git remote -v 查看对应的克隆地址: git remote -v origin https://github.com/username/repository.git (fetch ...
- .NET 开源工作流: Slickflow流程引擎高级开发(七)--消息队列(RabbitMQ)的集成使用
前言:工作流流程过程中,除了正常的人工审批类型的节点外,事件类型的节点处理也尤为重要.比如比较常见的事件类型的节点有:Timer/Message/Signal等.本文重点阐述消息类型的节点处理,以及实 ...
- 五.数据库同步,创建django用户,用户登陆过程
(1)配置数据库 项目目录/settings.py是一个普通的python模块,每项配置都是一key/value 数据库的配置是以dict的形式存放在这个模块中,key名为:DATABASES DAT ...
- 注解式HTTP请求Feign (F版)
Spring Cloud 为开发者提供了在分布式系统中的一些常用的组件(例如配置管理,服务发现,断路器,智能路由,微代理,控制总线,一次性令牌,全局锁定,决策竞选,分布式会话集群状态).使用Sprin ...
- Linux下C++动态加载so 调用方法
Windows 下的C++动态加载DLL调用方法 文献参考 http://man7.org/linux/man-pages/man0/dlfcn.h.0p.html http://man7.org/l ...
- LeetCode-Queue
简单题 1. 数据流中的移动平均值 $(leetcode-346) 暂无 2. 最近的请求次数(leetcode-933) 写一个 RecentCounter 类来计算最近的请求. 它只有一个方法:p ...
- 如何快速部署一条Simplechain子链
我们都知道Simplechain是一种主子链架构,主链Simplechain是POW共识算法的公链.那如何快速创建一条属于自己的子链呢?下面我们就是快速部署一条子链流程.首先clone 源码, 然后按 ...
- 前端进阶笔记(一)---JS语言通识
一.语言按照语法分类 1.非形式语言:中文 英文 2.形式语言:乔姆斯基谱系(四种文法 上下文包含文法) 0型 无限制文法 1型 上下文相关文法 2型 上下文无关文法 正则文法 二 产生式(BNF) ...