我,不是说了PID要平均值吗?
前几日写了一篇PID算法学习笔记,并幻想了一个场景进行算法仿真。经过不断探索后,博主发现,PID算法的精髓不在算法逻辑,而在于PID三个参数的值。本篇随笔将延续上次的仿真实验进行调试,总结PID调参的规律和方法。

一、调参口诀
先看看百度找到的调参口诀。
参数整定找最佳, 从小到大顺序查。①
先是比例后积分, 最后再把微分加。②
曲线振荡很频繁, 比例度盘要放大。③
曲线漂浮绕大弯, 比例度盘往小扳。④
曲线偏离回复慢, 积分时间往下降。⑤
曲线波动周期长, 积分时间再加长。⑥
曲线振荡频率快, 先把微分降下来。⑦
动差大来波动慢, 微分时间应加长。⑧
理想曲线两个波, 前高后低四比一。⑨
一看二调多分析, 调节质量不会低。⑩

二、调参实战
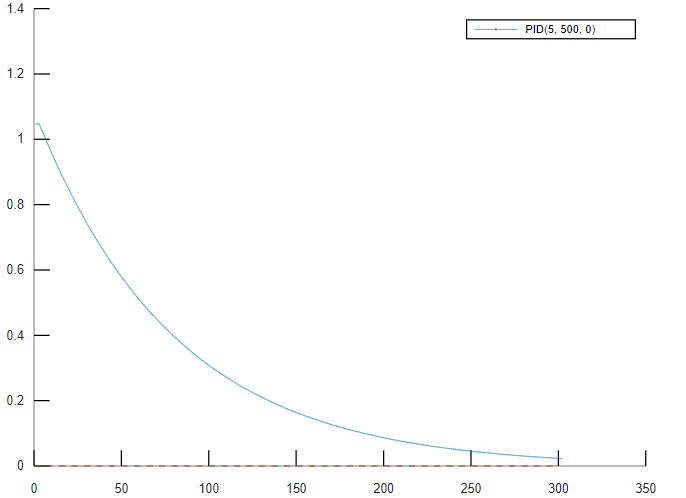
口诀①,从小到大。根据${PID}$公式可知,积分常数${I}$越大,对输出值影响越小,而比例常数和微分常数越大,对输出值影响越大。
因此,以${(P,I,D)=(5,500,0)}$为初始值,其仿真曲线为
口诀②,先比例。先调节${P}$,分别为5,25,50。
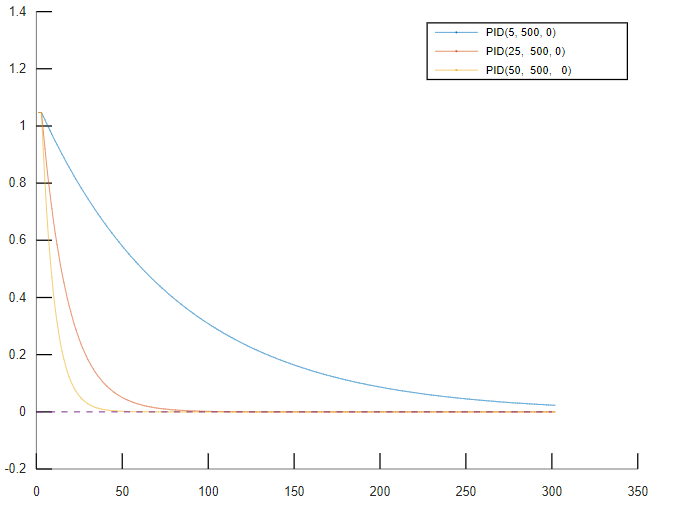
如上图,比例系数越大,曲线越快接近设定值,${P}$为50时,效果最佳。
后积分。后调${I}$,分别为50, 5, 0.5
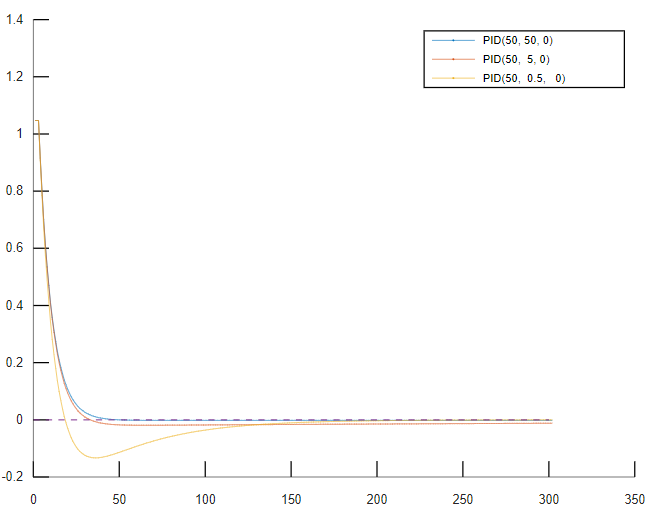
如上图,积分常数P越小,曲线越快达到设定值。当${P}$为0.5时效果最佳
再微分。再调${D}$,分别为0.005, 0.05, 0.5
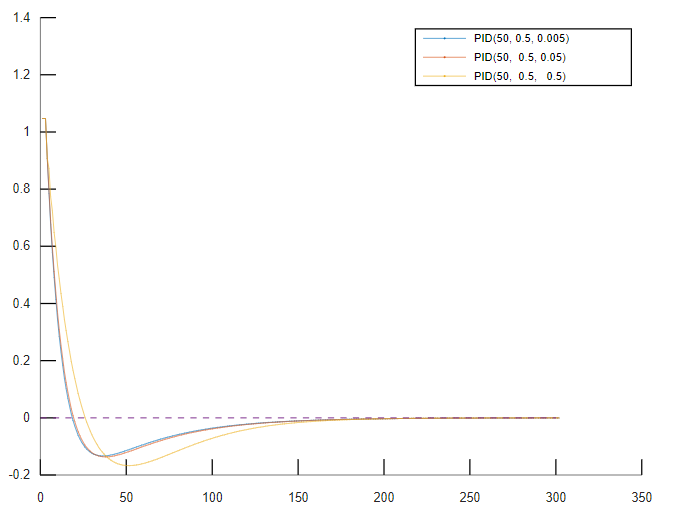
如上图,${D}$值变大,曲线并没有明显变化。通过上面几次调节,暂时得到一组较优的PID值,为
${PID_{s}=(50,500,0)}$
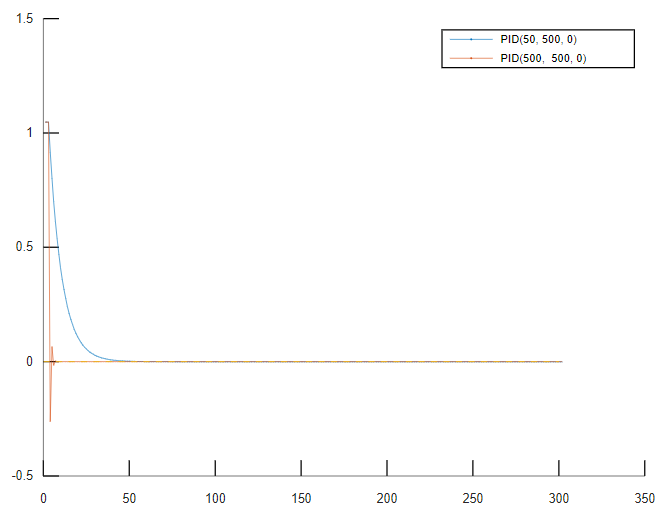
进一步研究,以该值为基准,改变其中的值。
(1)改变P值,改变为500,发现曲线很快超出了设定值,但是如果不考虑稳定性的话,该曲线能更快接近设定值。
(2)改变I值,改变为0.02,发现曲线也会很快超出设定值,后缓慢抖动接近设定值,抖动频率小于曲线(1),根据口诀⑨,这样的曲线可以称作“理想曲线”

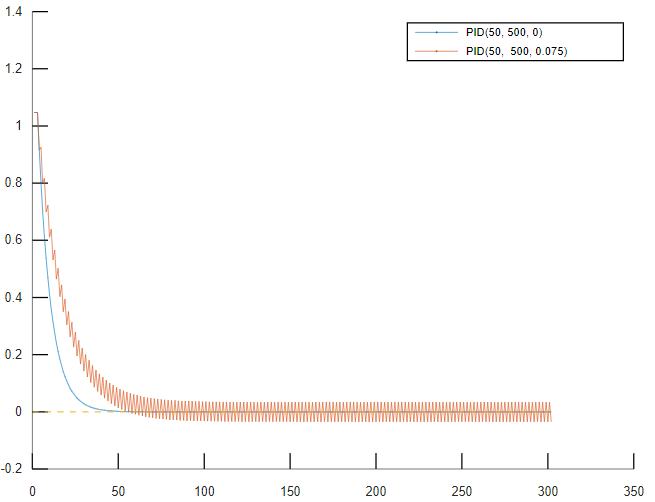
(3)改变${D}$值,改变为0.0.75,曲线剧烈抖动。根据口诀⑦可知,积分系数过大,需要减小。

三、总结
我的数学模型存在很多缺陷,并不能完全模仿真实环境。进行简单的调参后可以发现,P系数调节可能出现“一劳永逸”的情况。而I调节可以减弱P的某些过激行为,比如剧烈抖动变为缓慢震荡,D调节则增强这种行为。本实验中,D系数的作用并不明显,还应在以后的实验中多多观察。
最后,如果调成平均值会发生什么呢?
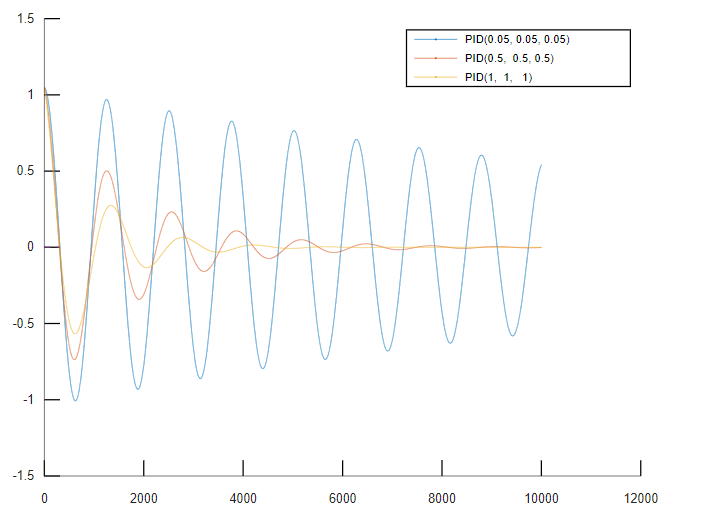
看,它是不是变得非常强大了……
我,不是说了我不是标题党吗?

我,不是说了PID要平均值吗?的更多相关文章
- HDU 2376 树形dp|树上任意两点距离和的平均值
原题:http://acm.hdu.edu.cn/showproblem.php?pid=2376 经典问题,求的是树上任意两点和的平均值. 这里我们不能枚举点,这样n^2的复杂度.我们可以枚举每一条 ...
- 记录一个多核CPU负载不均衡问题(动态绑定进程到指定cpu:taskset -pc $CPU $PID)
昨晚和一位读者朋友讨论了一个问题:在一台多核 CPU 的 Web 服务器上,存在负载不均衡问题,其中 CPU0 的负载明显高于其它 CPUx,进一步调查表明 PHP-FPM 的嫌疑很大.话说以前我曾经 ...
- 漫谈PID——实现与调参
闲话: 作为一个控制专业的学生,说起PID,真是让我又爱又恨.甚至有时候会觉得我可能这辈子都学不会pid了,但是经过一段时间的反复琢磨,pid也不是很复杂.所以在看懂pid的基础上,写下这篇文章,方便 ...
- SIMATIC PID温度控制
SIMATIC PID温度控制 // VAR_INPUT ------------------------------------------------------------------- #if ...
- 移动端测试===PROC系列之---/proc/pid/stat 如何准确取cpu的值【转】
/proc/ /stat 包含了所有CPU活跃的信息,该文件中的所有值都是从系统启动开始累计到当前时刻. [root@localhost ~]# cat /proc/6873/stat 68 ...
- 自整定模糊PID算法的理论
模糊控制系统的构成与与常规的反馈控制系统的主要区别在于控制器主要是由模糊化,模糊推理机和精确化三个功能模块和知识库(包括数据库和规则库)构成的.具体实现过程如下所示: (1)预处理: 输入数据往往是通 ...
- PID控制算法的C语言实现
参考: PID控制器开发笔 浅谈位置式PID 专家PID控制在快速系统中的仿真及应用(这篇了论文介绍的积分分离PID.专家PID(脚本实现和simulink实现)很详细) PID控制算法的C语言实现一 ...
- C语言 · 整数平均值
编写函数,求包含n个元素的整数数组中元素的平均值.要求在函数内部使用指针操纵数组元素,其中n个整数从键盘输入,输出为其平均值. 样例输入: (输入格式说明:5为输入数据的个数,3 4 0 0 2 是以 ...
- 80 端口被占用 pid=4
80端口被pid=4的系统进程给占用的解决方法: 一般开发的时候我们都会安装sqlserver ,也会把Sql server Reporting Services 安装上去.原因就是这个服务占用了80 ...
随机推荐
- 看完肯定懂的 Java 字符串常量池指南
字符串问题可谓是 Java 中经久不衰的问题,尤其是字符串常量池经常作为面试题出现.可即便是看似简单而又经常被提起的问题,还是有好多同学一知半解,看上去懂了,仔细分析起来却又发现不太明白. 背景说明 ...
- Jenkins(1)- centos7.X下安装Jenkins
如果想从头学起Jenkins的话,可以看看这一系列的文章哦 https://www.cnblogs.com/poloyy/category/1645399.html 下载安装包 wget http:/ ...
- Android--sos闪光灯
Camera camera = null; Parameters parameters = null; Handler handler = new Handler() { @Override publ ...
- wireshark的基础认识
简单的抓包分析 使用过滤功能: 数据分别经过:物理层-> 数据链路层->网络层 ->传输层 ->应用层 下面将详细的查分各个层所涉及的东西. 物理层:单位是比特流 数据链路层; ...
- 【JAVA基础】02 Java基础语法
一.内容 注释 关键字 标识符 常量.进制和进制转换 变量 数据类型和类型转换 运算符 语句 二.注释 注释概述 用于解释说明程序的文字 Java中注释分类格式 单行注释 格式://注释文字 多行注释 ...
- Django入门2:路由系统
1.单一路由对应 url(r'^index/', views.index), # FBV url(r'^home/', views.Home.as_view()), # CBV 2.基于正则的路由 u ...
- spark系列-4、spark序列化方案、GC对spark性能的影响
一.spark的序列化 1.1.官网解释 http://spark.apache.org/docs/2.1.1/tuning.html#data-serialization 序列化在任何分布式应用程序 ...
- 通过例题进一步学习DP
1.以上篇文章数塔为例 https://blog.csdn.net/weixin_43627118/article/details/88701586 上一章用的是递归的做法,这次我们采用递推的做法. ...
- 使用python实现模拟掷骰子数据分析
Data:2020/4/8 主题:模拟实现掷骰子数据分析 编译环境:pycharm 库:pygal 说明: code 1:创建一个掷骰子类对象,类方法获得掷骰子随机数1-6,默认6个面,模拟20次将结 ...
- F. Cards and Joy
F. Cards and Joy 题目大意: 给你n个人,每一个人恰好选k张牌. 第一行是 n 和 k 第二行有n*k个数,代表有n*k张牌,每张牌上的数字 第三行有n个数,代表第i个人喜欢的数字 第 ...