Velodyne VPL16 configuration in ROS Kinetic
1. 驱动安装
sudo apt-get install ros-kinetic-velodyne
2. 在已有工作空间catkin_ws中,添加Velodyne包
cd ~/catkin_ws/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
catkin_make
sourrce devel/setup.bash (或 source ~/.bashrc)
3. 修改网络端口IPv4 setting
(1)找到右上角wifi图标,右键鼠标->Edit connection
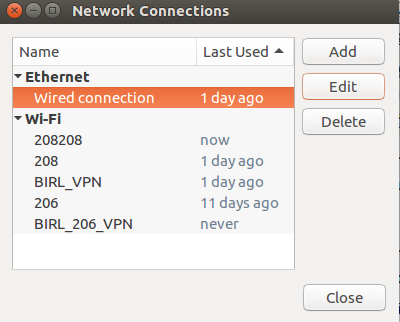
Wired connection->Edit->IPv4 Settings
Methods->Manual
(2)修改Addresses中的各项参数
Address 192.168.1.77
Netmask 255.255.255.0
Gateway 192.168.1.1
(3)save
4. 连接激光雷达,将网线接上电脑和velodyne,打开浏览器输入192.168.1.201可以看到激光雷达的配置文件。
5. 把Velodyne XML文件转成ROS节点的YAML文件(VLP-16.xml文件是激光雷达附赠U盘中提供的,转换后生成VLP-16.yaml):
rosrun velodyne_pointcloud gen_calibration.py /home/william/catkin_ws/src/velodyne/VLP-16.xml(根据VLP-16.xml文件位置修改路径)
6. 加载:
roslaunch velodyne_pointcloud VLP16_points.launch calibration:=/home/william/catkin_ws/src/velodyne/VLP-16.yaml(同上)
7. 实时显示点云图:
rosrun rviz rviz -f velodyne
然后在rviz中点Add,增加PointCloud2,再在PointCloud2下点topic输入/velodyne_points。这样就可以实时显示获取的3D点云图。
8. 保存数据
rosbag record -O velodyne_points /velodyne_points
只保存/velodyne_points这个topic的数据(可以用rostopic list -v开看当前可用的topic),保存在当前目录的velodyne_points.bag。
9. 后记:
VeloView也是可以实时显示3D LiDAR激光雷达点云图的,保存格式是pcap。
参考:http://blog.csdn.net/littlethunder/article/details/51920681
Velodyne VPL16 configuration in ROS Kinetic的更多相关文章
- ROS_Kinetic_02 ROS Kinetic 迁移指南及中文wiki指南(Migration guide)
ROS_Kinetic_02 ROS Kinetic 迁移指南(Migration guide) 对于ROS Kinetic Kame有些功能包已经更新改变,提供关于这些包的迁移注意或教程.主要针对于 ...
- Ubuntu 16.04 + ROS Kinetic 机器人操作系统学习镜像分享与使用安装说明
Ubuntu 16.04 + ROS Kinetic 镜像分享与使用安装说明 内容概要:1 网盘文件介绍 2 镜像制作 3 系统使用与安装 ---- 祝ROS爱好者和开发者新年快乐:-) ---- ...
- ROS_Kinetic_01 在ubuntu 16.04安装ROS Kinetic 2017.01更新
ROS_Kinetic系列学习(一),在ubuntu 16.04安装ROS Kinetic. Celebrating 9 Years of ROS! ubuntu16.04已经发布半年多了,ROS的K ...
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ros kinetic安装rbx1
1.首先安装一些依赖包 sudo apt-get install ros-kinetic-turtlebot-bringup \ ros-kinetic-turtlebot-create ros-ki ...
- Ros Kinetic 配置 OpenCV2和CV_bridge (Python, C++)
本篇介绍如何在Ros-kinetic环境下运用opencv2进行开发的配置,系统平台为64位Ubuntu16.04. 需要系统环境: 1.Ros kinetic版本,一般自带cv_bridge, 若没 ...
- Ubuntu 16.04 使用docker资料汇总与应用docker安装caffe并使用Classifier(ros kinetic+usb_cam+caffe)
Docker是开源的应用容器引擎.若想简单了解一下,可以参考百度百科词条Docker.好像只支持64位系统. Docker官网:https://www.docker.com/ Docker - 从入门 ...
- 在ROS Kinetic和Gazebo 8中使用智能汽车仿真演示
在ROS Kinetic和Gazebo 8中使用智能汽车仿真演示 智能车无人驾驶技术是目前人工智能和机器人技术的研究热点,有许多开源平台可以使我们零基础零成本入门无人驾驶技术.本文分享一下目前ROS官 ...
- 在ROS Kinetic中使用Gazebo 8进行机器人仿真
在ROS Kinetic中使用Gazebo 8比在ROS Indigo中使用Gazebo 3-8要容易一些. 目前最新稳定版本的Gazebo8为8.1.1. 安装流程如下: $ sudo apt-g ...
随机推荐
- laravel 判断上传文件的类型和后缀
学习源头: https://blog.csdn.net/ddjjll8877/article/details/52249965 class FileUpdateController extends B ...
- POJ2456(最大化最小值)
Aggressive cows Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 10728 Accepted: 5288 ...
- ov2640数据
问题部分解决,数据错误的原因是太快了.将0x11->3f 0xd3->7f 哈哈 问题解决 直接降低7670输出频率 调0x11到最大分频比 现在能完整抓拍QVGA的图像 不过就是采集速 ...
- 修改crushmap实验
标签(空格分隔): ceph,ceph实验,crushmap CRUSH的全称是Controlled Replication Under Scalable Hashing,是ceph数据存储的分布式选 ...
- 转:InnoDB多版本(MVCC)实现简要分析
InnoDB多版本(MVCC)实现简要分析 基本知识 假设对于多版本(MVCC)的基础知识,有所了解.InnoDB为了实现多版本的一致读,采用的是基于回滚段的协议. 行结构 InnoDB表数据的组织方 ...
- socket模型
Socket: "主机" + "端口" = 套接字/插座; 仅仅是一个通信模型,不属于七层协议(网络协议). 一台电脑(IP)的一个应用程序(端口) 和 另一台 ...
- [更新中]【South使用总结】django开发中使用South进行数据库迁移
Django开发中使用South进行数据库迁移的使用总结 South的详细资料可产看官方文档http://south.readthedocs.org/en/latest South安装配置 pip i ...
- HDLM命令dlnkmgr详解之五_set
set命令用来设置HDLM的操作环境及参数. set操作设置的大部分是dlnkmgr view -sys命令中显示的参数值 命令格式 dlnkmgr set { -lb on [ -lbtype { ...
- JDBC批处理数据
JDBC3.0 的增强支持BLOB,CLOB,ARRAY,REF数据类型.的ResultSet对象UPDATEBLOB(),updateCLOB(),updateArray()和updateRef( ...
- 【277】◀▶ Python 列表/元组/字典说明
目录: 前言 一.访问列表中的值 二.更新列表 三.删除列表元素 四.Python 列表脚本操作符 五.Python 列表函数 & 方法 参考:Python 列表(List)使用说明 列表截取 ...