pytorch 实战教程之 Feature Pyramid Networks (FPN) 特征金字塔网络实现代码
原文作者:aircraft
原文链接:pytorch 实战教程之 Feature Pyramid Networks (FPN) 特征金字塔网络实现代码 - aircraft - 博客园
学习YOLOv5前的准备就是学习DarkNet53网络,FPN特征金字塔网络,PANet结构,SPPF结构等。本篇讲FPN特征金字塔网络。。。
特征金字塔网络(Feature Pyramid Networks, FPN)结构详解
1. 核心思想
FPN 通过结合 深层语义信息(高层特征)和 浅层细节信息(低层特征),构建多尺度的特征金字塔,显著提升目标检测模型对不同尺寸目标的检测能力。
2. 网络结构组成
FPN 由以下核心组件构成:
| 组件 | 作用 | 对应代码部分 |
|---|---|---|
| 骨干网络(自底向上C2-C5) | 提取多尺度特征(如ResNet) | layer1-layer4 |
| 自顶向下路径(P5-P2) | 通过上采样传递高层语义信息 | _upsample_add |
| 横向连接 | 将不同层级的特征对齐通道后融合 | latlayer1-latlayer3 |
| 特征平滑层 | 消除上采样带来的混叠效应 | smooth1-smooth3 |
3. 详细结构分解
3.1 骨干网络(Bottom-Up Pathway)
在这个过程中,特征图的分辨率逐渐降低,而语义信息逐渐丰富。每一层特征图都代表了输入图像在不同尺度上的抽象表示
- 作用:逐级提取特征,分辨率递减,语义信息递增
- 典型实现:ResNet的四个阶段(C1-C5)
- 输出特征图:
C2: [H/4, W/4, 256] (高分辨率,低层细节)
C3: [H/8, W/8, 512]
C4: [H/16, W/16, 1024]
C5: [H/32, W/32, 2048] (低分辨率,高层语义) - 代码对应:
# 构建四个特征提取阶段(stage)
# stage1: 不进行下采样(stride=1)
self.layer1 = self._make_layer(block, 64, num_blocks[0], stride=1)
# stage2: 进行下采样(stride=2)
self.layer2 = self._make_layer(block, 128, num_blocks[1], stride=2)
self.layer3 = self._make_layer(block, 256, num_blocks[2], stride=2)
self.layer4 = self._make_layer(block, 512, num_blocks[3], stride=2)
骨干网络(自底向上,从C2到C5):
C2到C5代表不同的ResNet卷积组,这些卷积组包含了多个Bottleneck结构,组内的特征图大小相同,组间大小递减。
Bottleneck结构(瓶颈残差块):包含三个卷积层,能够有效减少参数数量并提升性能。ResNet-18使用基础的残差块BasicBlock:两个3*3的卷积层,而ResNet-50使用Bottleneck块:一个1*1的卷积层降低通道数目,然后到3*3的卷积层融合特征,再到1*1的卷积层恢复通道数。
3.2 自顶向下路径(Top-Down Pathway)(从P5-P2):
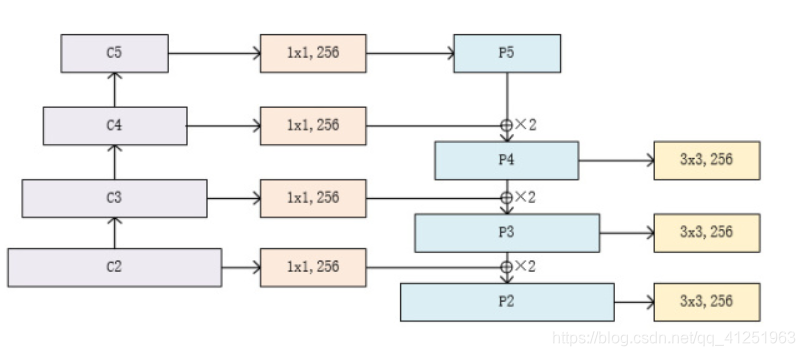
为了解决高层特征图分辨率低、细节信息少的问题,FPN引入了自顶向下的特征融合路径。首先对C5进行1x1卷积降低通道数得到P5,然后依次进行双线性差值上采样后与C2-C4层横向连接过来的数据直接相加,分别得到P4-P2,P4,P3,P2在通过一个3*3的平滑卷积层使得数据融合输出。
流程:
- 顶层处理:C5 → 1x1卷积 → P5
- 逐级上采样:P5 → 上采样 → 与C4融合 → P4 → 上采样 → 与C3融合 → P3 ...
P5 (高层语义)
↓ 上采样2x
P4 = P5上采样 + C4投影
↓ 上采样2x
P3 = P4上采样 + C3投影
↓ 上采样2x
P2 = P3上采样 + C2投影
核心操作就是通过双线性上采样后的高层特征与浅层数据直接相加后续融合:
def _upsample_add(self, x, y):
_,_,H,W = y.size()
return F.interpolate(x, (H,W), mode='bilinear') + y # 双线性上采样
3.3 横向连接(Lateral Connections):
目的是为了将上采样后的高语义特征与浅层的定位细节进行融合,实现多尺度特征融合(通过横向连接将浅层细节与深层语义结合),横向连接不仅有助于传递低层特征图的细节信息,还可以增强高层特征图的定位能力。高语义特征经过上采样后,其长宽与对应的浅层特征相同,而通道数固定为256。因此需要对特征C2——C4进行1x1卷积使得其通道数变为256.,然后两者进行逐元素相加得到P4、P3与P2。
- 作用:将骨干网络特征与上采样特征对齐通道
- 实现方式:1x1卷积(通道压缩/对齐)
- 代码对应:
self.latlayer1 = nn.Conv2d(1024, 256, 1) # C4 (1024通道) → 256通道
self.latlayer2 = nn.Conv2d(512, 256, 1) # C3 (512通道) → 256通道
self.latlayer3 = nn.Conv2d(256, 256, 1) # C2 (256通道) → 保持256通道
3.4 特征平滑(Smoothing):
得到相加后的特征后,利用3x3卷积对生成的P2,P3,P4进行融合。目的是消除上采样过程中带来的重叠效应,以生成最终的特征图。
- 作用:消除上采样导致的锯齿状伪影
- 实现方式:3x3卷积(不改变分辨率)
- 代码对应:
self.smooth1 = nn.Conv2d(256, 256, 3, padding=1) # P4平滑
self.smooth2 = nn.Conv2d(256, 256, 3, padding=1) # P3平滑
self.smooth3 = nn.Conv2d(256, 256, 3, padding=1) # P2平滑
4. 输出特征金字塔
| 特征层 | 分辨率(相对于输入) | 通道数 | 适用目标尺寸 |
|---|---|---|---|
| P2 | 1/4 | 256 | 小目标(<32x32像素) |
| P3 | 1/8 | 256 | 中等目标(32-96像素) |
| P4 | 1/16 | 256 | 大目标(>96x96像素) |
| P5 | 1/32 | 256 | 极大目标/背景 |
- 通过上述步骤,FPN构建了一个特征金字塔(feature pyramid)。这个金字塔包含了从底层到顶层的多个尺度的特征图,每个特征图都融合了不同层次的特征信息。
- 特征金字塔的每一层都对应一个特定的尺度范围,使得模型能够同时处理不同大小的目标。
5. 设计优势
- 多尺度预测:每个金字塔层都可独立用于目标检测
- 参数共享:所有层级使用相同的检测头(Head)
- 计算高效:横向连接仅使用轻量级的1x1卷积
- 端到端训练:整个网络可联合优化
6. 典型应用场景
- 目标检测:Faster R-CNN、Mask R-CNN
- 实例分割:Mask预测分支可附加到各金字塔层
- 关键点检测:高分辨率特征层(如P2)适合精细定位
基于pytorch的实现代码(可复制直接运行,注释都打的挺详细了,仔细看即可):
'''
Feature Pyramid Networks (FPN) 特征金字塔网络实现
论文: 《Feature Pyramid Networks for Object Detection》
核心思想:通过自顶向下路径和横向连接,构建多尺度特征金字塔
'''
import torch
import torch.nn as nn
import torch.nn.functional as F from torch.autograd import Variable class Bottleneck(nn.Module):
"""ResNet的瓶颈残差块,通道扩展比例为4"""
expansion = 4 # 输出通道扩展倍数(最终输出通道数 = planes * expansion) def __init__(self, in_planes, planes, stride=1):
"""
参数说明:
in_planes: 输入特征图的通道数
planes: 中间层的基准通道数(实际输出通道为 planes * expansion)
stride: 第一个卷积层的步长(用于下采样)
"""
super(Bottleneck, self).__init__()
# 第一层:1x1卷积压缩通道(通道数:in_planes -> planes)
self.conv1 = nn.Conv2d(in_planes, planes, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(planes) # 第二层:3x3卷积处理特征(通道数不变,可能进行下采样)
self.conv2 = nn.Conv2d(planes, planes, kernel_size=3,
stride=stride, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(planes) # 第三层:1x1卷积恢复通道数(通道数:planes -> planes*expansion)
self.conv3 = nn.Conv2d(planes, self.expansion*planes,
kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(self.expansion*planes) # 捷径连接(当输入输出维度不匹配时,使用1x1卷积调整)
self.shortcut = nn.Sequential()
if stride != 1 or in_planes != self.expansion*planes:
self.shortcut = nn.Sequential(
nn.Conv2d(in_planes, self.expansion*planes,
kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(self.expansion*planes)
) def forward(self, x):
# 主路径处理
out = F.relu(self.bn1(self.conv1(x))) # 压缩通道
out = F.relu(self.bn2(self.conv2(out))) # 空间特征处理(可能下采样)
out = self.bn3(self.conv3(out)) # 恢复通道数 # 残差连接(如果维度不匹配,通过shortcut调整)
out += self.shortcut(x)
out = F.relu(out)
return out class FPN(nn.Module):
"""特征金字塔网络主结构"""
def __init__(self, block, num_blocks):
"""
参数说明:
block: 基础构建块类型(本代码中使用Bottleneck)
num_blocks: 每个stage包含的block数量(列表长度必须为4)
"""
super(FPN, self).__init__()
self.in_planes = 64 # 初始通道数(会在_make_layer中自动更新) # ----------------- 骨干网络初始化 -----------------
# 初始卷积层(模仿ResNet的前处理)
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False)
self.bn1 = nn.BatchNorm2d(64) # 构建四个特征提取阶段(stage)
# stage1: 不进行下采样(stride=1)
self.layer1 = self._make_layer(block, 64, num_blocks[0], stride=1)
# stage2: 进行下采样(stride=2)
self.layer2 = self._make_layer(block, 128, num_blocks[1], stride=2)
self.layer3 = self._make_layer(block, 256, num_blocks[2], stride=2)
self.layer4 = self._make_layer(block, 512, num_blocks[3], stride=2) # ----------------- 特征金字塔网络组件 -----------------
# 顶层特征处理(将stage4的输出通道压缩到256)
self.toplayer = nn.Conv2d(2048, 256, kernel_size=1, stride=1, padding=0) # 横向连接层(Lateral Connections)
# 将各stage的输出通道统一为256
self.latlayer1 = nn.Conv2d(1024, 256, kernel_size=1, stride=1, padding=0) # stage3输出通道是1024
self.latlayer2 = nn.Conv2d(512, 256, kernel_size=1, stride=1, padding=0) # stage2输出通道是512
self.latlayer3 = nn.Conv2d(256, 256, kernel_size=1, stride=1, padding=0) # stage1输出通道是256 # 特征平滑层(消除上采样带来的混叠效应)
self.smooth1 = nn.Conv2d(256, 256, kernel_size=3, stride=1, padding=1)
self.smooth2 = nn.Conv2d(256, 256, kernel_size=3, stride=1, padding=1)
self.smooth3 = nn.Conv2d(256, 256, kernel_size=3, stride=1, padding=1) def _make_layer(self, block, planes, num_blocks, stride):
"""
构建一个特征处理阶段(stage)
参数:
block: 块类型(Bottleneck)
planes: 该stage的基础通道数
num_blocks: 包含的block数量
stride: 第一个block的步长
"""
# 生成步长列表:第一个block可能下采样,后续保持分辨率
strides = [stride] + [1]*(num_blocks-1)
layers = []
for stride in strides:
# 逐个添加block,并自动更新输入通道数
layers.append(block(self.in_planes, planes, stride))
self.in_planes = planes * block.expansion # 更新为当前block的输出通道数
return nn.Sequential(*layers) # 将多个block打包为顺序模块 def _upsample_add(self, x, y):
"""
特征图上采样并相加(特征融合核心操作)
参数:
x: 高层特征(需要上采样)
y: 低层特征(需要通道对齐)
"""
# 获取低层特征y的空间尺寸
_,_,H,W = y.size()
# 双线性插值上采样(确保尺寸匹配)
return F.interpolate(x, size=(H,W), mode='bilinear', align_corners=False) + y def forward(self, x):
# ----------------- 自底向上路径(骨干网络) -----------------
# Stage 0: 初始卷积+池化
c1 = F.relu(self.bn1(self.conv1(x))) # [1,64,300,450] (假设输入600x900)
c1 = F.max_pool2d(c1, kernel_size=3, stride=2, padding=1) # [1,64,150,225] # Stage 1-4: 通过四个特征阶段
c2 = self.layer1(c1) # [1,256,150,225] (2个Bottleneck,每个输出256通道)
c3 = self.layer2(c2) # [1,512,75,113] (下采样,2个Bottleneck)
c4 = self.layer3(c3) # [1,1024,38,57] (继续下采样)
c5 = self.layer4(c4) # [1,2048,19,29] (最终高层特征) # ----------------- 自顶向下路径(特征金字塔构建) -----------------
# 顶层特征处理
p5 = self.toplayer(c5) # [1,256,19,29] (2048->256通道) # 特征融合(自上而下)
p4 = self._upsample_add(p5, self.latlayer1(c4)) # [1,256,38,57]
p3 = self._upsample_add(p4, self.latlayer2(c3)) # [1,256,75,113]
p2 = self._upsample_add(p3, self.latlayer3(c2)) # [1,256,150,225] # ----------------- 特征平滑处理 -----------------
p4 = self.smooth1(p4) # 保持[1,256,38,57]
p3 = self.smooth2(p3) # 保持[1,256,75,113]
p2 = self.smooth3(p2) # 保持[1,256,150,225] return p2, p3, p4, p5 # 返回多尺度特征(分辨率从高到低排列) def FPN18():
"""构建FPN-18结构(类似ResNet-18的配置)"""
# 参数说明:4个stage分别包含2,2,2,2个Bottleneck块
return FPN(Bottleneck, [2,2,2,2]) def test():
"""测试函数:验证网络结构"""
net = FPN18()
# 生成随机输入(1张3通道的600x900图像)
input_tensor = Variable(torch.randn(1,3,600,900))
# 前向传播获取各层特征
feature_maps = net(input_tensor) # 打印各层输出尺寸
for i, fm in enumerate(feature_maps):
print(f"P{i+2} shape: {fm.size()}") test() #if __name__ == "__main__":
# test() """
预期输出(当输入为600x900时):
P2 shape: torch.Size([1, 256, 150, 225]) # 最高分辨率特征
P3 shape: torch.Size([1, 256, 75, 113])
P4 shape: torch.Size([1, 256, 38, 57])
P5 shape: torch.Size([1, 256, 19, 29]) # 最低分辨率特征 """
可能有疑问的代码段详细讲解:
def _make_layer(self, block, planes, num_blocks, stride):
"""
构建一个特征处理阶段(stage)
参数:
block: 块类型(Bottleneck)
planes: 该stage的基础通道数
num_blocks: 包含的block数量
stride: 第一个block的步长
"""
# 生成步长列表:第一个block可能下采样,后续保持分辨率
strides = [stride] + [1]*(num_blocks-1)
layers = []
for stride in strides:
# 逐个添加block,并自动更新输入通道数
layers.append(block(self.in_planes, planes, stride))
self.in_planes = planes * block.expansion # 更新为当前block的输出通道数
return nn.Sequential(*layers) # 将多个block打包为顺序模块
block参数这里就指代Bottleneck类,num_blocks就是这里几个块组合,stride步长
第一行:strides = [stride] + [1]*(num_blocks-1)
- 这里创建了一个列表
strides,由传入的stride参数和一个包含num_blocks-1个1的列表拼接而成。 - 例如,如果
num_blocks=3且stride=2,则strides为[2, 1, 1]。 - 这样做的目的是让第一个block使用给定的
stride(可能进行下采样),后续的block使用步长1,保持分辨率不变。
第二行:layers = []
- 初始化一个空列表
layers,用于存放该阶段的所有block。
第三行:for stride in strides:
- 遍历之前生成的
strides列表中的每一个stride值。
第四行:layers.append(block(self.in_planes, planes, stride))
- 将新创建的block实例添加到
layers列表中。 block是传入的块类型,如Bottleneck。self.in_planes是当前输入的通道数,planes是该块的基础通道数,stride是当前步长。- 这一步实例化一个block,并将其添加到层列表中。
第五行:self.in_planes = planes * block.expansion
- 更新
self.in_planes为planes乘以block的扩展系数(例如Bottleneck的expansion是4)。 - 因为每个block的输出通道数是
planes * expansion,所以下一个block的输入通道数需要更新为此值。
第六行:return nn.Sequential(*layers)
- 将
layers列表中的block按顺序组合成一个Sequential模块。 *layers是将列表解包为多个参数,Sequential会按顺序堆叠这些block。
参考博客:
https://blog.csdn.net/a8039974/article/details/142288667?spm=1001.2014.3001.5502
https://blog.csdn.net/a8039974/article/details/142288667?spm=1001.2014.3001.5502
pytorch 实战教程之 Feature Pyramid Networks (FPN) 特征金字塔网络实现代码的更多相关文章
- 特征金字塔网络Feature Pyramid Networks
小目标检测很难,为什么难.想象一下,两幅图片,尺寸一样,都是拍的红绿灯,但是一副图是离得很近的拍的,一幅图是离得很远的拍的,红绿灯在图片里只占了很小的一个角落,即便是对人眼而言,后者图片中的红绿灯也更 ...
- 『计算机视觉』FPN:feature pyramid networks for object detection
对用卷积神经网络进行目标检测方法的一种改进,通过提取多尺度的特征信息进行融合,进而提高目标检测的精度,特别是在小物体检测上的精度.FPN是ResNet或DenseNet等通用特征提取网络的附加组件,可 ...
- 常见特征金字塔网络FPN及变体
好久没有写文章了(对不起我在划水),最近在看北京的租房(真真贵呀). 预告一下,最近无事,根据个人多年的证券操作策略和自己的浅显的AI时间序列的算法知识,还有自己Javascript的现学现卖,在微信 ...
- 论文阅读笔记三十三:Feature Pyramid Networks for Object Detection(FPN CVPR 2017)
论文源址:https://arxiv.org/abs/1612.03144 代码:https://github.com/jwyang/fpn.pytorch 摘要 特征金字塔是用于不同尺寸目标检测中的 ...
- Feature Pyramid Networks for Object Detection比较FPN、UNet、Conv-Deconv
https://vitalab.github.io/deep-learning/2017/04/04/feature-pyramid-network.html Feature Pyramid Netw ...
- FPN(feature pyramid networks)
多尺度的object detection算法:FPN(feature pyramid networks). 原来多数的object detection算法都是只采用顶层特征做预测,但我们知道低层的特征 ...
- 【Network Architecture】Feature Pyramid Networks for Object Detection(FPN)论文解析(转)
目录 0. 前言 1. 博客一 2.. 博客二 0. 前言 这篇论文提出了一种新的特征融合方式来解决多尺度问题, 感觉挺有创新性的, 如果需要与其他网络进行拼接,还是需要再回到原文看一下细节.这里 ...
- Feature Pyramid Networks for Object Detection
Feature Pyramid Networks for Object Detection 特征金字塔网络用于目标检测 论文地址:https://arxiv.org/pdf/1612.03144.pd ...
- 特征金字塔网络 FPN
一. 提出背景 论文:Feature Pyramid Networks for Object Detection [点击下载] 在传统的图像处理方法中,金字塔是比较常用的一种手段,像 SIFT 基于 ...
- FPN(feature pyramid networks)
多数的object detection算法都是只采用顶层特征做预测,但我们知道低层的特征语义信息比较少,但是目标位置准确:高层的特征语义信息比较丰富,但是目标位置比较粗略.另外虽然也有些算法采用多尺度 ...
随机推荐
- ctfshow--web11session置空绕过
代码审计 点击查看代码 <?php function replaceSpecialChar($strParam){ $regex = "/(select|from|where|join ...
- TCP/IP协议笔记
TCP/IP 一.TCP/IP简介 TCP/IP 指传输控制协议/网际协议(Transmission Control Protocol / Internet Protocol),是用于因特网 (Int ...
- 独立看门狗IWDG
一.简介 STM32F10xxx内置两个看门狗(独立看门狗是12位递减计数器,窗口看门狗是7位递减计数器),提供了更高的安全性.时间的精确性和使用的灵活性.两个看门狗设备(独立看门狗和窗口看门 ...
- .net 通过 HttpClient 下载文件同时报告进度的方法
通过 HttpClient 的 ContentLength 很多时候都可以拿到下载的内容的长度,通过 ReadAsync 可以返回当前读到的长度,将读取到的长度加起来就是已经下载的长度 看起来很简单, ...
- 认识soui4js(第1篇)
源代码:https://github.com/soui4js/soui4js soui4js是soui4+quickjs的结合体. soui4是一套c++ directui客户端开发框架,soui4j ...
- 这或许是全网最全的 DeepSeek 使用指南,95% 的人都不知道的使用技巧(建议收藏)
2025年春节过的好快,转眼间,大家又回到了各自工作岗位了,要说这个春节,什么最火,肯定绕不开DeepSeek. 几乎一夜之间,所有人都在关注DeepSeek,甚至我在老家,完全没用过AI的七大姑八大 ...
- Luogu P9055 [集训队互测 2021] 数列重排 题解 [ 紫 ] [ 构造 ] [ 数学 ]
数列重排:差点就场切的神仙构造,最后一步想假了,导致我模拟赛荣获 25+5+0 的好成绩! 这题部分分很有启发性,跟着一步一步打基本能想到正解的构造,但也有可能想偏部分分的意思,想假策略. 构造 先看 ...
- 基于DeepSeek R1 满血版大模型的个人知识库,回答都源自对你专属文件的深度学习。
这是一座专属你的知识宝库,它依托 DeepSeek R1 满血版大模型构建而成.在这里,每一次回答都源自对你专属文件的深度学习,精准匹配你的知识需求,为你输出最贴合文件内容的答案 . 使用 Cherr ...
- C# 手机号码隐藏中间四位
C# 隐藏手机号码中间四位数字 使用正则表达式隐藏手机号中间四位 if (!string.IsNullOrWhiteSpace(txtPhone.Text) && txtPhone.T ...
- ERROR 1820 (HY000): You must reset your password using ALTER USER statement before executing this
mysql操作错误: mysql> use mysql;ERROR 1820 (HY000): You must reset your password using ALTER USER sta ...