【POJ - 1573】Robot Motion
-->Robot Motion
直接中文
Descriptions:
样例1
样例2
N 向上
S 向下
E 向右
W 向左
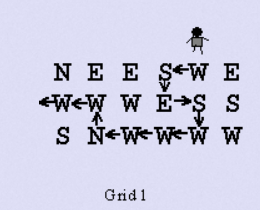
例如,假设机器人从网格1的北(顶)侧开始,从南(下)开始。机器人所遵循的路径如图所示。在离开网格之前,机器人在网格中执行10条指令。
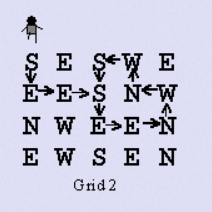
比较网格2中发生的情况:机器人仅通过3条指令,然后通过8条指令开始循环,并且永不退出。
您将编写一个程序来确定机器人离开网格所需的时间或机器人如何循环。
Input
Output
Sample Input
3 6 5
NEESWE
WWWESS
SNWWWW
4 5 1
SESWE
EESNW
NWEEN
EWSEN
0 0 0
Sample Output
10 step(s) to exit
3 step(s) before a loop of 8 step(s)
题目链接
https://vjudge.net/problem/POJ-1573
没啥说的,直接dfs搜就行
AC代码
#include <iostream>
#include <cstdio>
#include <fstream>
#include <algorithm>
#include <cmath>
#include <deque>
#include <vector>
#include <queue>
#include <string>
#include <cstring>
#include <map>
#include <stack>
#include <set>
#include <sstream>
#define mod 1000000007
#define eps 1e-6
#define ll long long
#define INF 0x3f3f3f3f
#define MEM(x,y) memset(x,y,sizeof(x))
#define Maxn 25
using namespace std;
int r,c,s;//行,列,从第s列开始
char mp[Maxn][Maxn];//地图
int vis[Maxn][Maxn];//标记是否走过
int step[Maxn][Maxn];//(x,y)是第几步 //(x,y) 下一步的字母标志 到(x,y)已是第step步
void dfs(int x,int y,char op,int start)
{
//走出迷宫
if(mp[x][y]=='X'||x<&&y<&&x>r&&y>c)
cout<<start<<" step(s) to exit"<<endl;
//(x,y)没走过
else if(!vis[x][y])
{
vis[x][y]=;
step[x][y]=start+;
//四种走法
if(op=='N')
return dfs(x-,y,mp[x-][y],step[x][y]);
if(op=='S')
return dfs(x+,y,mp[x+][y],step[x][y]);
if(op=='E')
return dfs(x,y+,mp[x][y+],step[x][y]);
if(op=='W')
return dfs(x,y-,mp[x][y-],step[x][y]);
}
//(x,y)走过,输出即可
else if(vis)
cout<<step[x][y]-<<" step(s) before a loop of "<<start+-step[x][y]<<" step(s)"<<endl;
}
int main()
{
while(cin>>r>>c>>s,r+c+s)
{
//初始化
MEM(mp,'X');
MEM(vis,);
MEM(step,);
for(int i=; i<=r; i++)
for(int j=; j<=c; j++)
cin>>mp[i][j];
step[][s]=;
dfs(,s,mp[][s],step[][s]);
}
}
【POJ - 1573】Robot Motion的更多相关文章
- POJ 1573:Robot Motion
Robot Motion Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 11324 Accepted: 5512 Des ...
- bzoj 2295: 【POJ Challenge】我爱你啊
2295: [POJ Challenge]我爱你啊 Time Limit: 1 Sec Memory Limit: 128 MB Description ftiasch是个十分受女生欢迎的同学,所以 ...
- 【链表】BZOJ 2288: 【POJ Challenge】生日礼物
2288: [POJ Challenge]生日礼物 Time Limit: 10 Sec Memory Limit: 128 MBSubmit: 382 Solved: 111[Submit][S ...
- BZOJ2288: 【POJ Challenge】生日礼物
2288: [POJ Challenge]生日礼物 Time Limit: 10 Sec Memory Limit: 128 MBSubmit: 284 Solved: 82[Submit][St ...
- BZOJ2293: 【POJ Challenge】吉他英雄
2293: [POJ Challenge]吉他英雄 Time Limit: 1 Sec Memory Limit: 128 MBSubmit: 80 Solved: 59[Submit][Stat ...
- BZOJ2287: 【POJ Challenge】消失之物
2287: [POJ Challenge]消失之物 Time Limit: 10 Sec Memory Limit: 128 MBSubmit: 254 Solved: 140[Submit][S ...
- BZOJ2295: 【POJ Challenge】我爱你啊
2295: [POJ Challenge]我爱你啊 Time Limit: 1 Sec Memory Limit: 128 MBSubmit: 126 Solved: 90[Submit][Sta ...
- BZOJ2296: 【POJ Challenge】随机种子
2296: [POJ Challenge]随机种子 Time Limit: 1 Sec Memory Limit: 128 MBSec Special JudgeSubmit: 114 Solv ...
- BZOJ2292: 【POJ Challenge 】永远挑战
2292: [POJ Challenge ]永远挑战 Time Limit: 10 Sec Memory Limit: 128 MBSubmit: 513 Solved: 201[Submit][ ...
随机推荐
- ORA-09925: Unable to create audit trail file
当我修改ORACLE_SID为新的SID,想进行数据库还原时,用sqlplus报如下错误 [oracle@dbtest ~]$ sqlplus / as sysdba SQL Production : ...
- 使用Visual Studio开发Python
Python优秀的集成开发环境有PyCharm,Visual Studio Code等,当然你仍然可以使用Visual Studio进行开发.如果你熟悉Visual Studio,使用Visual S ...
- 浅谈浏览器http的缓存机制 good
http://www.cnblogs.com/vajoy/p/5341664.html
- 基于CKEditor 你能做很多App。CKEditor 4.5 and CKFinder 3 beta 发布
直击现场 CKEditor 4.5 and CKFinder 3 beta 发布 oschina 发布于: 2015年04月10日 (0评) 分享到: 收藏 +5 4月18日 武汉 源创会开始报 ...
- 访问类的私有属性(RTTI和模仿类2种方法)
如何访问类的私有属性? 下面以 TPathData 为例,它有一个私有属性 PathData,储存了每一个曲线点,但一般无法修改它,需要利用下面方法,才能访问修改(若有更好的方法,歡迎分享): 一.利 ...
- Access Violation分成两大类:运行期和设计期(很全的解释)
用Delphi开发程序时,我们可以把遇到的Access Violation分成两大类:运行期和设计期. 一.设计期的Access Violation 1.硬件原因 在启动或关闭Delphi IDE以 ...
- 《CSS 设计指南》笔记(Ⅰ)
在图书馆借了这本书,讲的非常好,条理清晰,深入浅出,真的有一种和作者交流的感觉,解决了自己很多困惑,于是决定针对一些平时并不常用但是感觉会用到的知识点做一些笔记,加深印象. 一. 块级元素盒子会扩展到 ...
- [2017.02.13] linux平台下统计C++项目文件个数和代码行数
#输出排序后文件名 file='find . -name "*.[ch]" | sort' #统计文件个数 filecnt='find . -name "*.[ch]&q ...
- 高并发 Nginx+Lua OpenResty系列(5)——Lua开发库Redis
Redis客户端 lua-resty-redis是为基于cosocket API的ngx_lua提供的Lua redis客户端,通过它可以完成Redis的操作.默认安装OpenResty时已经自带了该 ...
- Spark学习之路(四)—— RDD常用算子详解
一.Transformation spark常用的Transformation算子如下表: Transformation算子 Meaning(含义) map(func) 对原RDD中每个元素运用 fu ...