Ubuntu16.04中安装stlink驱动
系统环境:
Vmware12,
Ubuntu16.04
Stlink version:v1.4.0
一、安装依赖包:
sudo apt-get install libusb-1.0
sudo apt-get install cmake
sudo apt-get install libgtk-3-dev
二、下载源码
git clone https://github.com/texane/stlink.git
三、编译
在命令行终端中输入命令进行编译:
$ cd stlink
$ make release
$ make debug
$ cd build
$ cmake -DCMAKE_BUILD_TYPE=Debug ..
$ make
$ cd Release; sudo make install;sudo ldconfig
$ cd ../.. (回到stlink目录下)
$ sudo cp etc/udev/rules.d/* /etc/udev/rules.d/
$ udevadm control --reload-rules
$ udevadm trigger
四、测试
在命令行终端中输入命令:
st-info –version
会看到类似如下提示:
v1.4.0
五、添加udev的rules规则
添加udev规则的目的是可以让应用程序可以访问STlink仿真器设备。
把STlink仿真器插到电脑的USB口,待Ubuntu系统识别后,在命令行终端中输入命令:lsusb
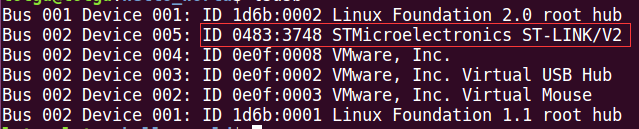
如上图所示,第二行可以看到STlink仿真器的类型和product ID和厂商ID。然后进入/etc/udev/rules.d/目录下,可以看到该目录下有一个99-vmware-scsi-udev.rules文件。在该文件中添加STlink设备信息,如下图第9行所示:

Ubuntu16.04中安装stlink驱动的更多相关文章
- SLAM+语音机器人DIY系列:(二)ROS入门——3.在ubuntu16.04中安装ROS kinetic
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- Ubuntu16.04下安装显卡驱动记录
安装环境及硬件信息 Ubuntu16.04 LTS 内核版本:4.4.0 显卡:Nvidia GeForce GTX 1060 安装过程 一.首先要下载好显卡驱动程序,官方网址:http://www. ...
- ROS-1 : Ubuntu16.04中安装ROS Kinetic
1.安装 ROS Kinetic仅支持Wily(Ubuntu 15.10).Xenial( Ubuntu16.04)和Jessie(Debian 8)的debian软件包. 1.1 配置Ubuntu ...
- 如何在Ubuntu16.04 中安装Linux, Nginx, MySQL, PHP (LEMP 栈)
介绍 LEMP 栈是用来开发动态网页和web 应用程序的一系列软件集合,LEMP描述的是Linux操作系统,Nginx web 服务器,以及后端数据存储MySQL/MariaDB数据库和服务器端动态脚 ...
- ubuntu16.04下安装nvidia驱动心得
首先机器重启后莫名出现循环登录错误,然后按照网上的方法卸载掉nvidia驱动后,可以正常登录. 但还是要再装nvidia驱动.网上说的各种方法都试过了,geforce.cn官网上推荐的各种版本的run ...
- Docker - 在Ubuntu16.04中安装Docker CE
Get Docker for Ubuntu Check system version root@Ubuntu16:~# uname -a Linux Ubuntu16 4.8.0-36-generic ...
- 在ubuntu16.04中安装apache2+modsecurity以及自定义WAF规则详解
一.Modsecurity规则语法示例 SecRule是ModSecurity主要的指令,用于创建安全规则.其基本语法如下: SecRule VARIABLES OPERATOR [ACTIONS] ...
- Ubuntu16.04中安装搜狗输入法
1.从搜狗输入法官网界面下载安装包 https://pinyin.sogou.com/linux/ 2.安装 sudo dpkg -i sogoupinyin_2.1.0.0082_amd64.deb ...
- Ubuntu16.04中安装VirtualBox及简单配置
sudo apt-get -y install virtualbox 注:将该图表拖到桌面上即可 往下的过程都不变..... 将左边的菜单栏移动到下面 打开一个终端输入:gsettings set c ...
随机推荐
- Genymotion上不能安装APK软件的问题
Genymotion模拟器不能安装APK的原因 官网给出的解释:Genymotion模拟器使用的是x86架构,在第三方市场上的应用有部分不采用x86这么一种架构,所以在编译的时候不通过,报“APP n ...
- Mysql Limit操作
oracle : || mysql: contact contact_ws 拼接 Font Size: Large | Medium | Small select * from tabl ...
- C# 托管资源 与 非托管资源
C# 托管资源 与 非托管资源 托管资源一般是指被CLR控制的内存资源,这些资源的管理可以由CLR来控制,.NET可以自动进行回收,主要是指托管堆上分配的内存资源.例如程序中分配的对象,作用域内的变量 ...
- 洛谷P1168中位数
传送门啦 基本思想就是二分寻找答案,然后用树状数组去维护有几个比这个二分出来的值大,然后就没有了: 数据要离散,这个好像用map也可以,但是不会: 那怎么离散呢? 我们先把a数组读入并复制给s数组,然 ...
- Effective STL 学习笔记 Item 16:vector, string & C API
有时需要支持 C 的接口,但这并不复杂. 对于 vector 来讲, \(v[0]\) 的地址 \(\&v[0]\) 即可作为数组指针传递给 C API: 1: // Legacy C API ...
- ASP.NET Web API 2:创建API帮助页面
当你新建了一个web API服务之后,再建一个API帮助页面是很有好处的,这样其他开发人员就会很清楚地知道如何调用你的API接口.你可以选择自己手工建立,但是如果能自动生成岂不是更好.为了简 ...
- 使用spring-boot-maven-plugin插件打包spring boot项目
在spring-boot项目中使用spring-boot-maven-plugin插件进行打包,输出可执行JAR包.项目包含多个模块,当打完包后在本地的maven仓库中发现输出的可执行JAR非常小,并 ...
- 【51nod】1655 染色问题
题解 首先每个颜色出现的次数应该是一样的 \(\frac{C_{n}^{2}}{n} = \frac{n - 1}{2}\) 所以n如果是偶数那么就无解了 然后我们需要让每个点连颜色不同的四条边 只要 ...
- 13:在O(1)时间内删除单向链表中的一个节点
思路:如果从首部开始依次查找,那么时间是O(n). 既然我们知道要删除的结点i,那么我们就知道它指向的下一个结点j,那么我们可以将j的内容复制到i,然后将i的指针指向j的下一个结点,这样虽然看起来我们 ...
- java.lang.ClassNotFoundException: net.sf.ezmorph.Morpher
java.lang.ClassNotFoundException: net.sf.ezmorph.Morpher 出现以上异常,可能是使用Json缺少ezmorph包: 以下是Json常用的包:ezm ...