Ubuntu22.04版本安装对应版本ROS教程 (小白2024年)
参考资料:(我是开了加速器,毕竟中间使用了github访问网址,国内免费加速器Steam++,开个github网站加速即可,不开我不知道行不行可以自己一试)
ROS 安装详细教程 —— Ubuntu22.0.4 LTS 安装-CSDN博客
我的虚拟机刚开始设置的是简体中文,此前已经通过初始时的软件更新更新过一次;
在配置完虚拟机后:
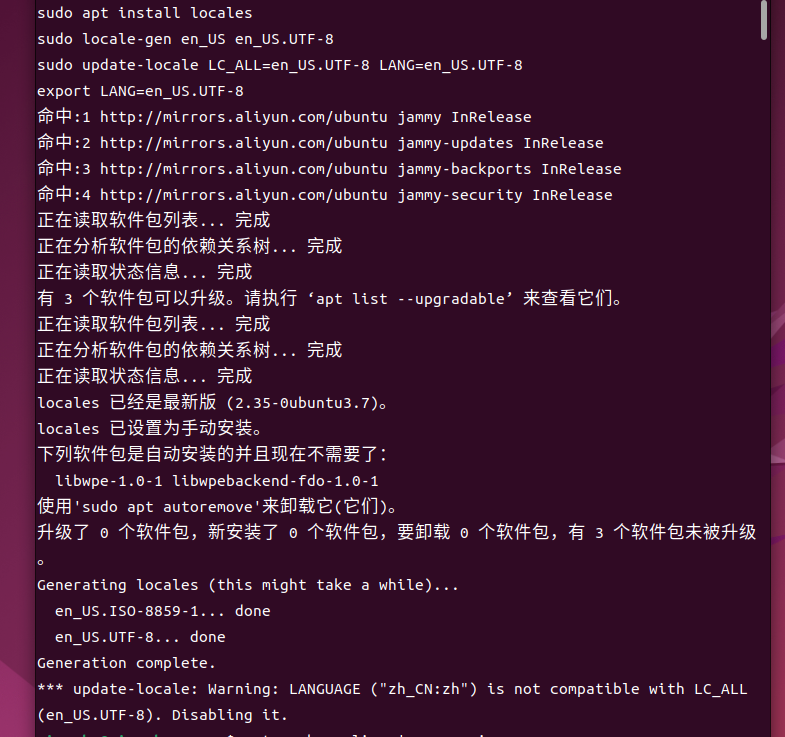
第一步先将字符集设置好如下代码:
sudo apt update
sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
下图为相应显示反应:
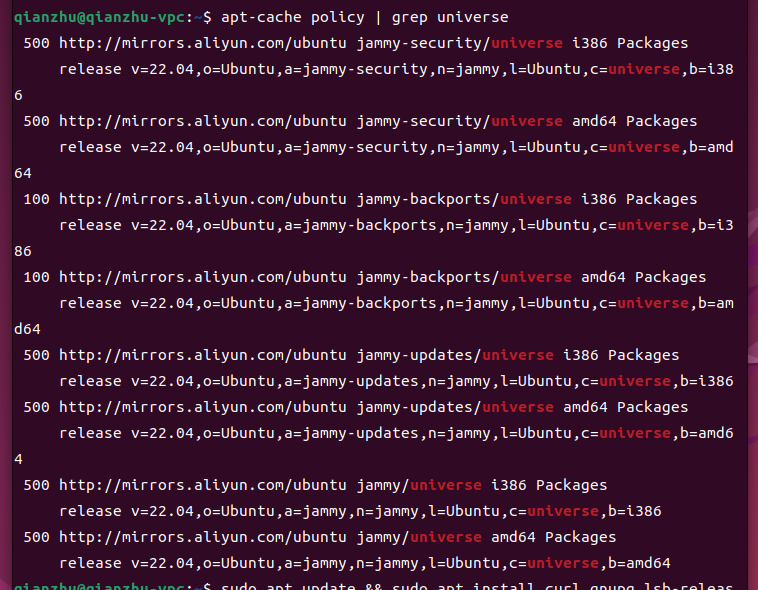
继续输入代码:## 通过检查此命令的输出,确保已启用Ubuntu Universe存储库。
apt-cache policy | grep universe
对应反应大致如下图即可:
下图为参考资料的相关说明:
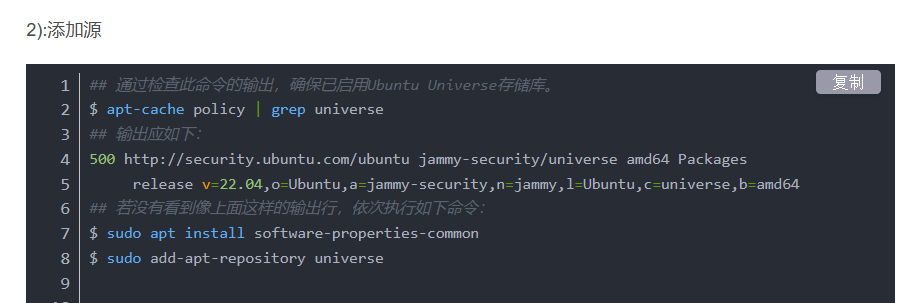
因为我执行完代码并没有出现什么不一样的问题所以上图7,8中代码我是没有使用的,如果在这里使用后具体有什么bug请自行处理,处理完后在留言说明具体办法方便为后来者提供解决办法。
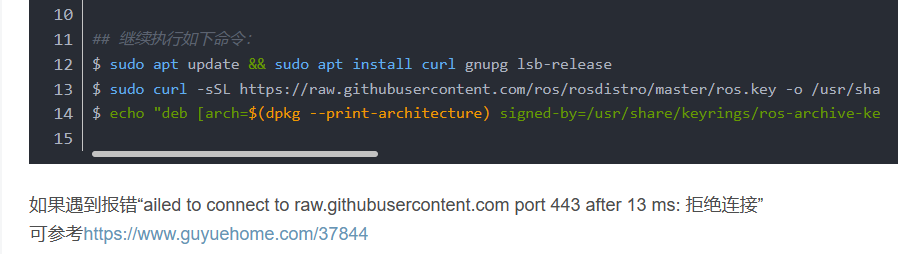
继续下一步操作:
sudo apt update && sudo apt install curl gnupg lsb-release
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
参考资料说明:
ps:关键点:害我删了两次虚拟机重新搞;
这里我的错误是如下:

curl: (7) Failed to connect to raw.githubusercontent.com port 443 after 65 ms:
连接被拒绝
解决方法:
法1.可以按照上上图中所指的网页https://www.guyuehome.com/37844,需要加速器加个速比较好上,再按照里面的步骤走,但是不好操作里面还涉及了一些终端文本编辑的操作,具体还要去自己查询处理;
法2:
使用如下代码:
sudo gedit /etc/hosts

使用后会打开一个文本编辑器,在内部增加一行即可:
185.199.108.133 raw.githubusercontent.com
如下图:
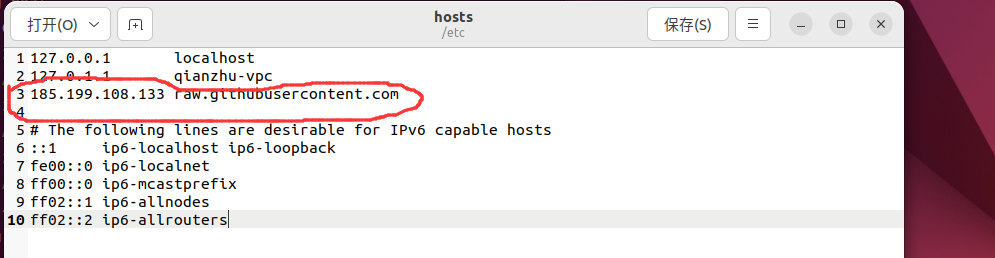
保存后关闭即可;
再重复使用一次如下命令:
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
使用后我是没有反应证明连接成功如下图:

继续执行如下代码:
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop
反应如下:
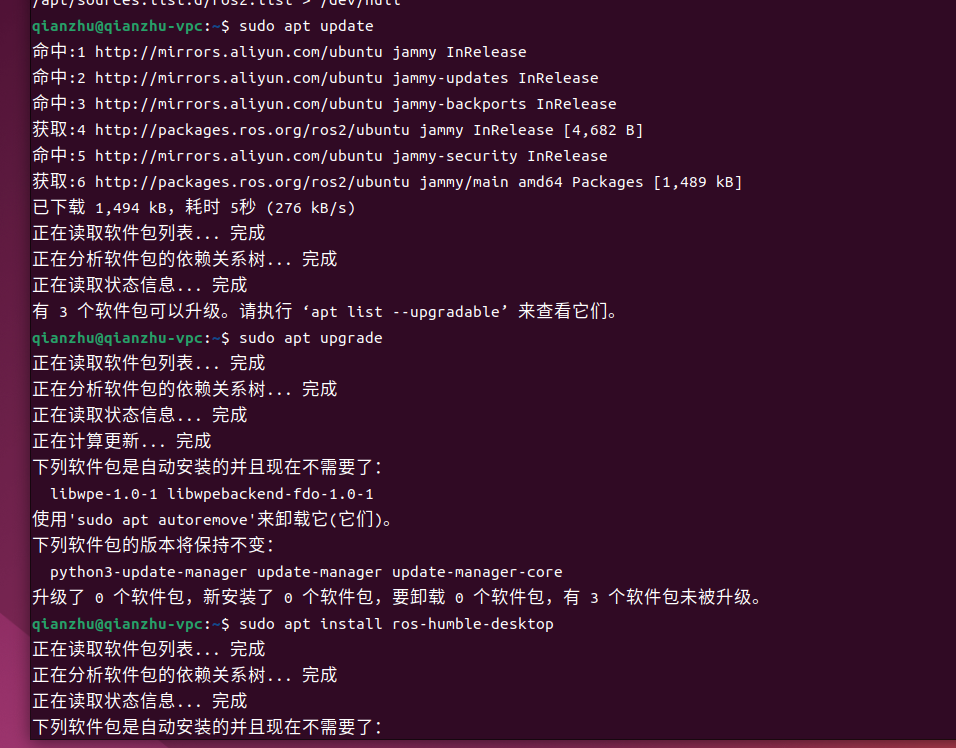
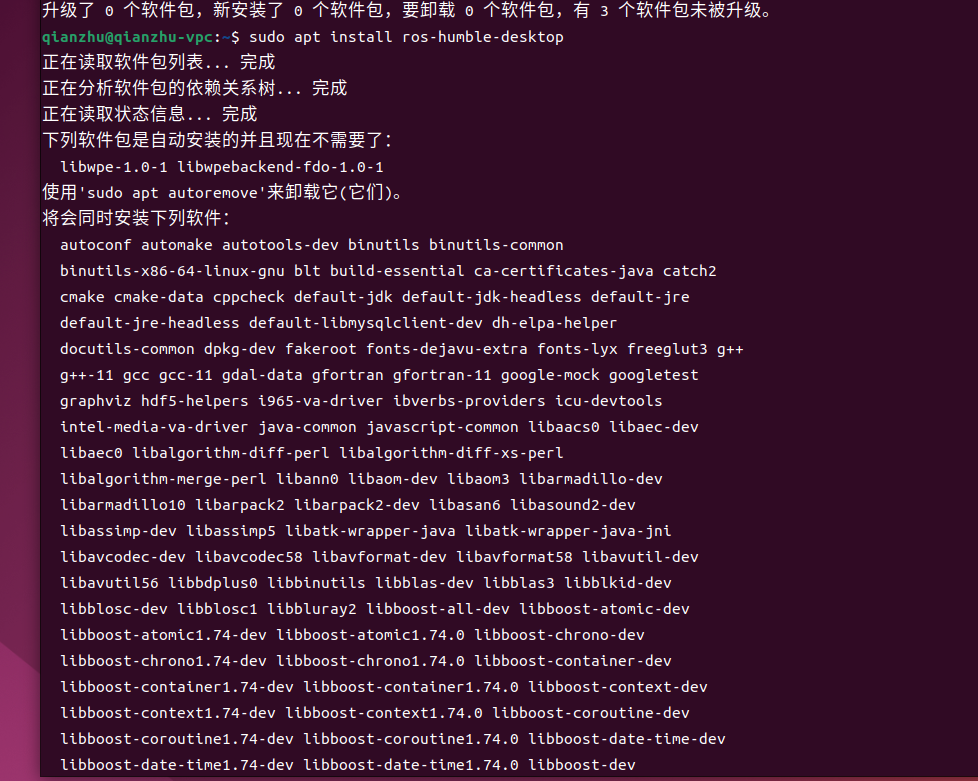
反正一大串的下完就完了;
等待下载完成继续执行如下操作:
source /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc
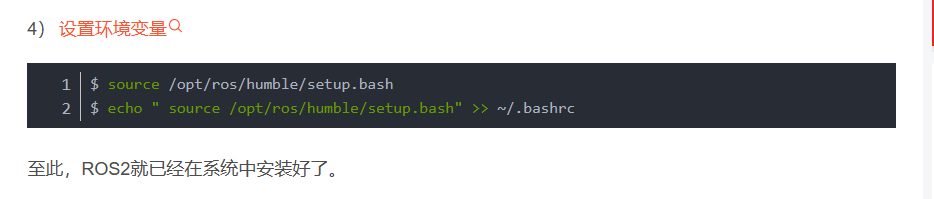
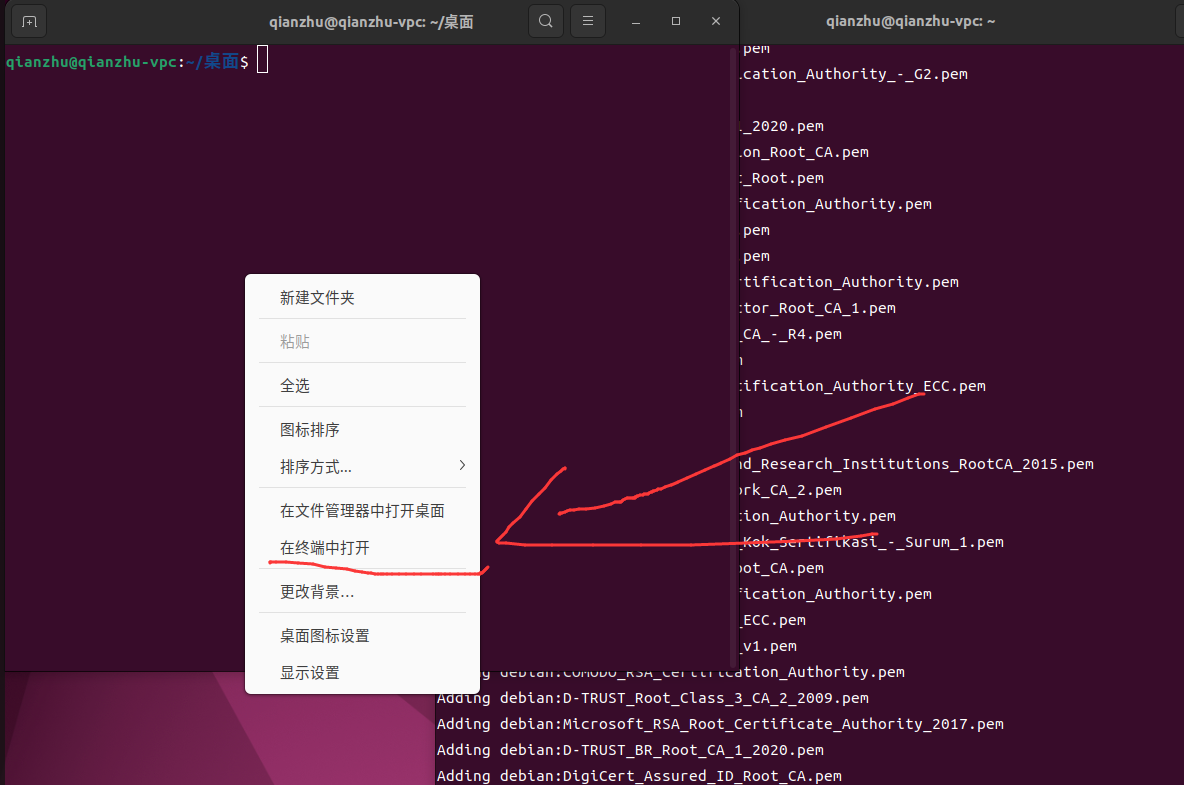
设置完环境变量下面就是测试环节了:
注意需要再打开一个终端,具体操作就是不关第一个终端,回到虚拟机屏幕页面右键点击终端即可,如下 图:
接下来在一个终端输入:
ros2 run demo_nodes_cpp talker
在另外一个终端输入:
ros2 run demo_nodes_py listener
两个终端反应如下:
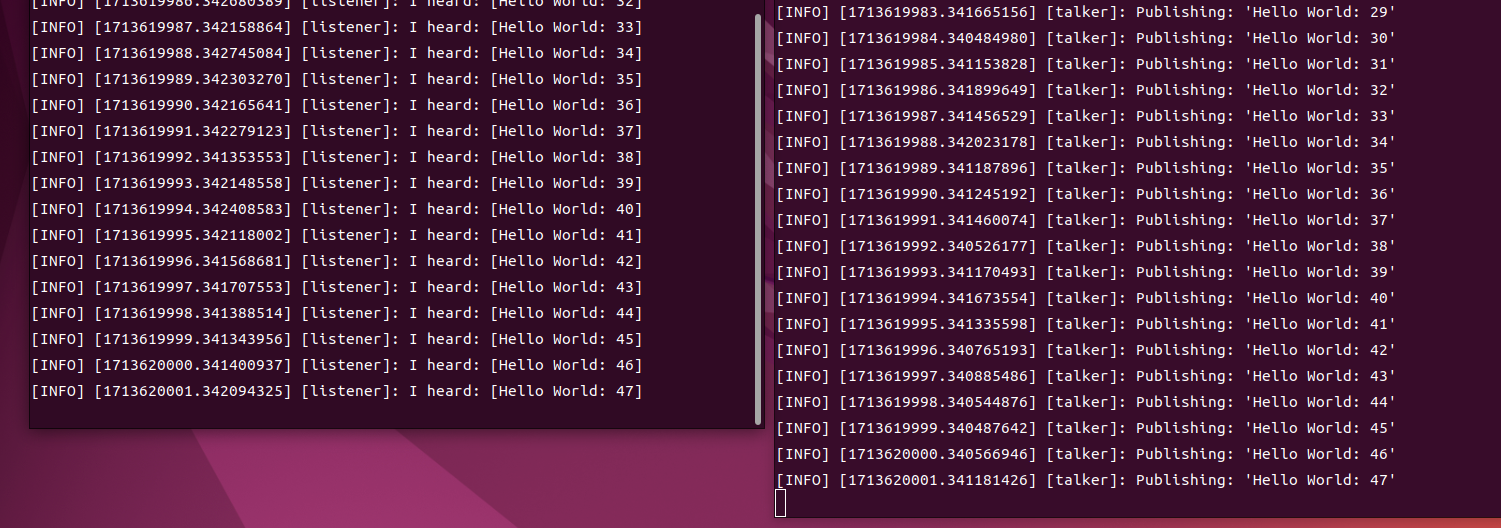
输入ctrl+z即可停止运行;
第二个测试:
一个终端输入:
ros2 run turtlesim turtlesim_node
另一个终端输入:
ros2 run turtlesim turtle_teleop_key
反应如下:
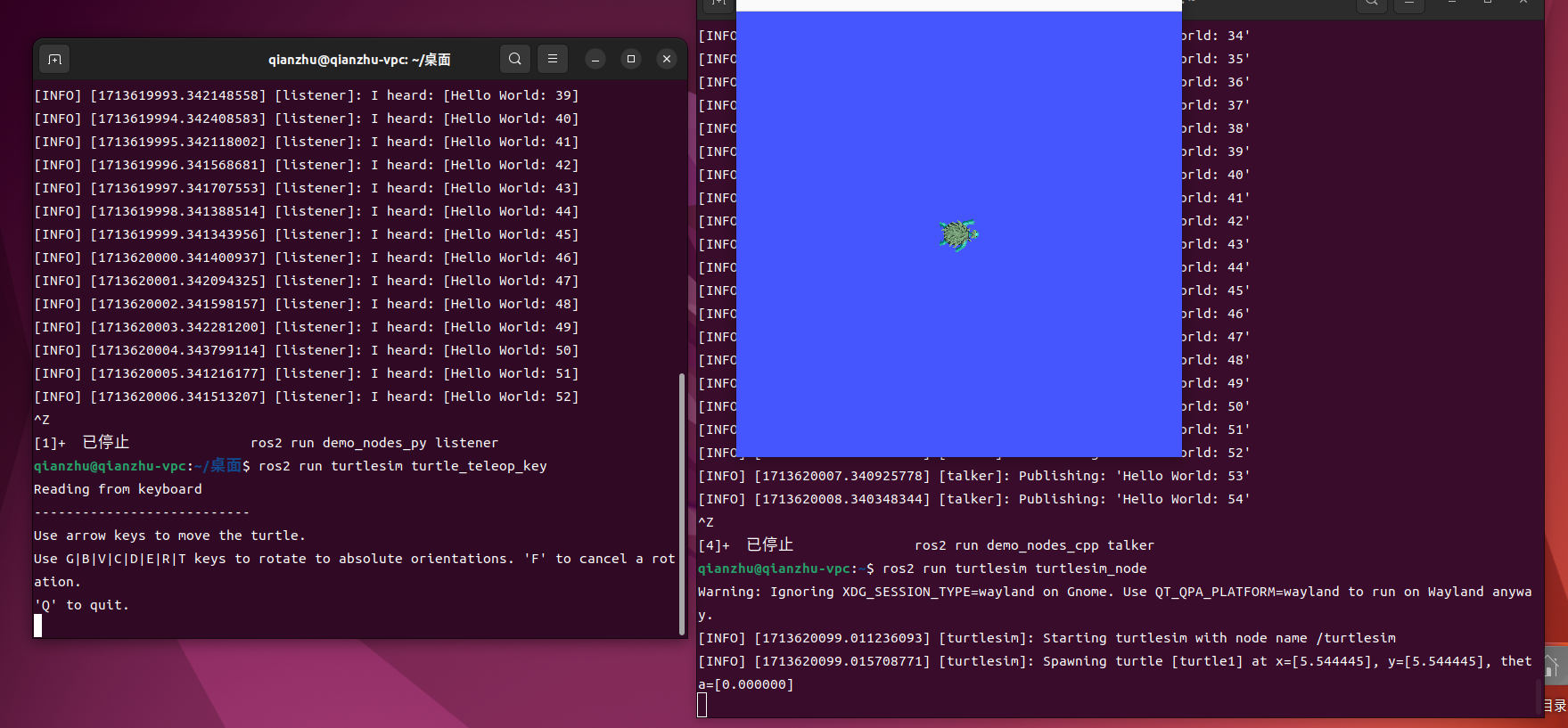
输入第二个代码的终端有说明根据键盘控制海龟的运行,同时使用键盘右半盘的上下左右箭头运动海龟运动也行;

至此完成调试;
写这篇文章是因为发现网上这个22.04版本ROS安装教程很少,而且查得到的安装的时候都出现了bug,为了大家的方便,在安装好ROS后第一时间将安装坑点与教程重新编写了一次,希望大家不要在这里浪费太多时间,把饭喂到大家嘴边。中间还有一些代码我没运行的可能运行了也会有些bug存在,希望如果有bug后来者可以及时补充,减少时间的浪费。
Ubuntu22.04版本安装对应版本ROS教程 (小白2024年)的更多相关文章
- Ubuntu16.04下安装多版本cuda和cudnn
Ubuntu16.04下安装多版本cuda和cudnn 原文 https://blog.csdn.net/tunhuzhuang1836/article/details/79545625 前言 因为之 ...
- mysql 5.7以上版本安装配置方法图文教程(mysql 5.7.12\mysql 5.7.13\mysql 5.7.14)(转)
http://www.jb51.net/article/90302.htm ******************************* 这篇文章主要为大家分享了MySQL 5.7以上缩版本安装配置 ...
- 带有pwn环境的Ubuntu22.04快速安装
pwn环境ubuntu22.04快速安装(有克隆vmk) ubuntu更新到了22.04版本,经过本人测试后非常的好(ma)用(fan),该版本和mac很相像,而且用起来也比较丝滑,只不过配置上稍微有 ...
- Ubuntu22.04 KubeSphere 安装K8S集群
Ubuntu22.04 KubeSphere 安装K8S集群_Ri0n的博客-CSDN博客 一.系统环境系统:Ubuntu 22.04集群IP分布hostname 角色 IP地址master mast ...
- Ubuntu16.04下安装最新版本的CMake
当前最新版CMake为3.9.1.. Ubuntu中更新cmake到最新版本,过程如下: 1. 卸载已经安装的旧版的CMake[非必需] apt-get autoremove cmake 2. 文 ...
- Ubantu 14.04下安装高版本cmake
Ubantu14.04 下自带的cmake版本比较低(默认为2.8),这里我们从源码编译高版本cmake: 先卸载电脑上安装的cmake (如何已安装的话): sudo apt-get autorem ...
- MySQL8.0.x 版本安装步骤傻瓜式教程【官方版】
MySQL8.0.x 安装 一.下载 MySQL官网下载链接:https://downloads.mysql.com/archives/community/ 选择版本后下载zip文件 博主选择的是8. ...
- Ubuntu 16.04 上安装 MySQL 5.7 教程
介绍 MySQL 是一种开源数据库管理系统,通常作为流行的LAMP(Linux,Apache,MySQL,PHP / Python / Perl)堆栈的一部分安装.它使用关系数据库和SQL(结构化查询 ...
- VSCode 安装以及初步使用教程
老样子先介绍一下VSCode(是什么?干什么?有什么用?好处是什么?等) VisualStudioCode(简称VSCode)是Microsoft开发的代码编辑器,它支持Windows,Linux和m ...
- Caffe学习笔记2--Ubuntu 14.04 64bit 安装Caffe(GPU版本)
0.检查配置 1. VMWare上运行的Ubuntu,并不能支持真实的GPU(除了特定版本的VMWare和特定的GPU,要求条件严格,所以我在VMWare上搭建好了Caffe环境后,又重新在Windo ...
随机推荐
- Python下使用串口发送十六进制数据
import serial from time import sleep def recv(serial): while True: data = serial.read_all() if data ...
- 可穿戴设备主控制器芯片AMA3B 源码解析之初体验
一 背景和缘由 现在的mcu非常多,在超低功耗mcu这块,能赢得市场穿戴式设备使用的产品的确不多,以前是的是stm32 L系列,可是,随着L系列的缺货涨价和技术指标没有快速的发展,很多厂商都抛弃了 ...
- URL URI URN
总结如下: 1.简写: URI (uniform resource identifier)统一资源标志符: URL(uniform resource location )统一资源定位符(或统一资源定位 ...
- 记录--post为什么会发送两次请求?
这里给大家分享我在网上总结出来的一些知识,希望对大家有所帮助 在前段时间的一次面试中,被问到了一个如标题这样的问题.要想好好地去回答这个问题,这里牵扯到的知识点也是比较多的. 那么接下来这篇文章我们就 ...
- 记录--用css画扇形菜单
这里给大家分享我在网上总结出来的一些知识,希望对大家有所帮助 1.效果图 用手机录屏再用小程序转换的gif,可能精度上有点欠缺. 2.实现过程 1.观察及思考 开始编码前我们首先观察展开后的结构:两个 ...
- 记录--vue打印插件
这里给大家分享我在网上总结出来的一些知识,希望对大家有所帮助 网页实现打印 可以选择性的打印某一部分 的vue组件 1.引入 把print.js 下载到本地,然后放在src 下面添加文件夹里. pri ...
- C++ Concurrency in Action 读书笔记三:并发操作的同步
Chapter 4 并发操作的同步·Synchronizing concurrent operations
- dynatrace监控发现Java代码中new对象耗时100多秒
排查代码发现两个原因: 1.流,之前用的字节流,通过打日志发现并发场景有效率问题,改为了字符流: 2.用的jaxb转换xml,也是在并发时效率急剧下降,发现在每次转换时都在创建新对象,修改为只有第一次 ...
- 《.NET内存管理宝典 》(Pro .NET Memory Management) 阅读指南 - 第2章
本章勘误: 暂无,等待细心的你告诉我哦. 本章注解: 出处:2.2.6 Windows内存布局 原文: segment heap:用于Universal Windows Platform程序,它提供了 ...
- how to install local jar to maven repository
如何把maven不能引入的依赖安装到本地Repository: 1.比如fastdfs-client-java. <dependency> <groupId>org.csour ...