SRGAN 学习心得
一、理论
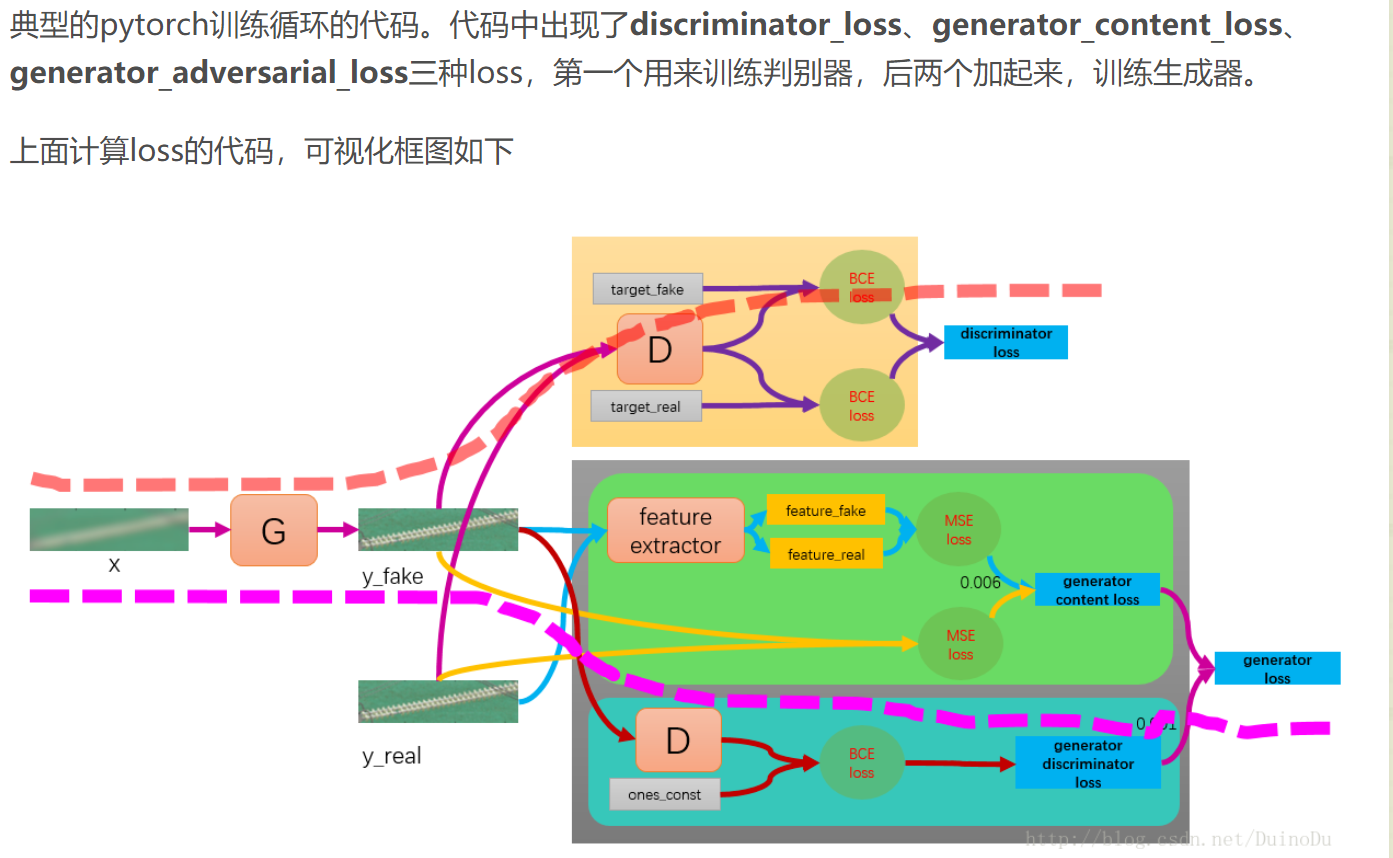
关于SRGAN的的论文中文翻译网上一大堆,可以直接读网络模型(大概了解),关于loss的理解,然后就能跑代码
loss = mse + 对抗损失 + 感知损失 : https://blog.csdn.net/DuinoDu/article/details/78819344
loss不要乱改,尽量按照原来论文的来,我尝试了 0.2*MSE+0.4*感知损失+0.4*对抗损失 , 结果loss很奇怪,效果也很差
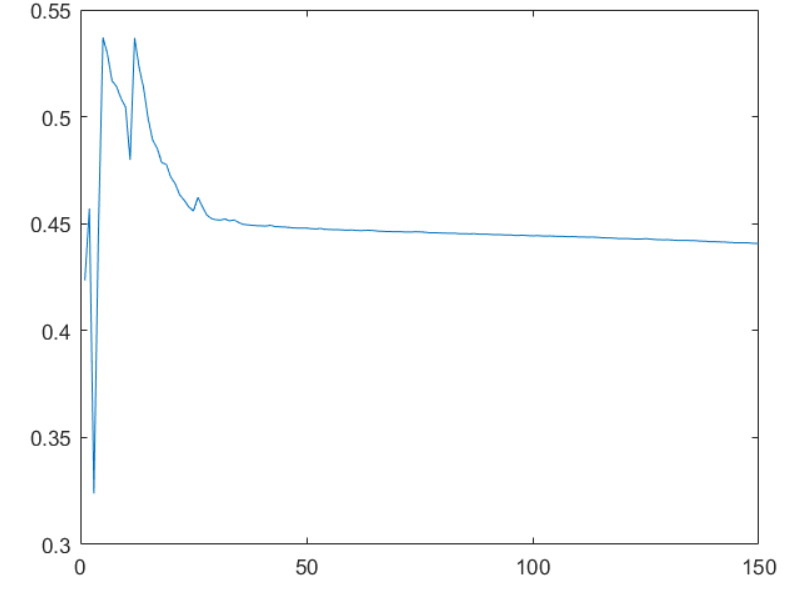
SRGAN的3个重要loss:
二、代码及其理解(源码)
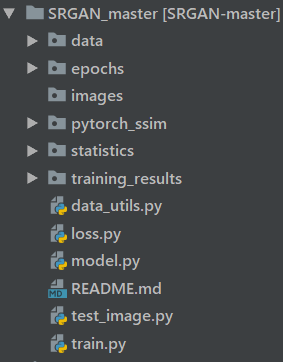
(1)文件结构(下面代码已经改好的,可直接跑)
(2)train.py
import argparse
import os
from math import log10 import pandas as pd
import torch.optim as optim
import torch.utils.data
import torchvision.utils as utils
from torch.autograd import Variable
from torch.utils.data import DataLoader
from tqdm import tqdm
import pytorch_ssim
from data_utils import TrainDatasetFromFolder, ValDatasetFromFolder, display_transform
from loss import GeneratorLoss
from model import Generator, Discriminator parser = argparse.ArgumentParser(description='Train Super Resolution Models')
parser.add_argument('--crop_size', default=88, type=int, help='training images crop size')
parser.add_argument('--upscale_factor', default=4, type=int, choices=[2, 4, 8],
help='super resolution upscale factor')
parser.add_argument('--num_epochs', default=100, type=int, help='train epoch number') opt = parser.parse_args() CROP_SIZE = opt.crop_size
UPSCALE_FACTOR = opt.upscale_factor
NUM_EPOCHS = opt.num_epochs
if __name__ == '__main__':
# 加载数据集
train_set = TrainDatasetFromFolder('/content/drive/My Drive/app/RBB/train', crop_size=CROP_SIZE, upscale_factor=UPSCALE_FACTOR)
val_set = ValDatasetFromFolder('/content/drive/My Drive/app/RBB/test', upscale_factor=UPSCALE_FACTOR)
train_loader = DataLoader(dataset=train_set, num_workers=4, batch_size=64, shuffle=True)
val_loader = DataLoader(dataset=val_set, num_workers=4, batch_size=1, shuffle=False)
# 加载网络模型
netG = Generator(UPSCALE_FACTOR)
print('# generator parameters:', sum(param.numel() for param in netG.parameters()))
netD = Discriminator()
print('# discriminator parameters:', sum(param.numel() for param in netD.parameters()))
# 加载loss函数
generator_criterion = GeneratorLoss()
# 判断GPU加速
if torch.cuda.is_available():
netG.cuda()
netD.cuda()
generator_criterion.cuda()
# 定义Adam优化器
optimizerG = optim.Adam(netG.parameters())
optimizerD = optim.Adam(netD.parameters())
# 定义结果保存的字典,值为列表
results = {'d_loss': [], 'g_loss': [], 'd_score': [], 'g_score': [], 'psnr': [], 'ssim': []} for epoch in range(1, NUM_EPOCHS + 1):
train_bar = tqdm(train_loader) # 生成进度条>>>>>>>>
# 定义字典统计相关超参数
running_results = {'batch_sizes': 0, 'd_loss': 0, 'g_loss': 0, 'd_score': 0, 'g_score': 0} netG.train()
netD.train()
for data, target in train_bar:
g_update_first = True
batch_size = data.size(0)
running_results['batch_sizes'] += batch_size
############################
# data/z:由target下采样的低分辨率图像 --> G --> fake_img --> D --> fake_out(label)
# target/real_img:高分辨率图像(原图) --> D --> real_out(label)
############################
# (1) 更新判别网络: maximize -1+D(z)-D(G(z))
# 判别网络的输出是数值,即是一个概率
###########################
real_img = Variable(target) # torch数据类型的标签图像real_img
if torch.cuda.is_available():
real_img = real_img.cuda() z = Variable(data) # torch数据类型的输入图像z
if torch.cuda.is_available():
z = z.cuda() fake_img = netG(z) # 生成网络的的输出图像fake_img netD.zero_grad() # 判别网络的梯度归零
real_out = netD(real_img).mean() # 判别网络对于标签图像的输出的均值real_out
fake_out = netD(fake_img).mean() # 判别网络对于fake_img的输出的均值fake_out
d_loss = 1 - real_out + fake_out # d_loss = - [D(z)-1-D(G(z))],所以最小化d_loss,则后一项的最大化
d_loss.backward(retain_graph=True) # 反向传播
optimizerD.step() # 梯度优化 ############################
# (2) 更新生成网络: minimize 1-D(G(z)) + Perception Loss + Image Loss + TV Loss
###########################
netG.zero_grad() # 生成网络梯度归零
g_loss = generator_criterion(fake_out, fake_img, real_img) # loss
g_loss.backward() # 反向传播
optimizerG.step() # 梯度优化
fake_img = netG(z) # 生成网络的的输出图像fake_img
fake_out = netD(fake_img).mean() # 判别网络对于fake_img的输出的均值fake_out g_loss = generator_criterion(fake_out, fake_img, real_img) # 生成网络loss计算
running_results['g_loss'] += g_loss.item() * batch_size
d_loss = 1 - real_out + fake_out # 判别网络loss计算
running_results['d_loss'] += d_loss.item() * batch_size
running_results['d_score'] += real_out.item() * batch_size
running_results['g_score'] += fake_out.item() * batch_size train_bar.set_description(desc='[%d/%d] Loss_D: %.4f Loss_G: %.4f D(x): %.4f D(G(z)): %.4f' % (
epoch, NUM_EPOCHS, running_results['d_loss'] / running_results['batch_sizes'],
running_results['g_loss'] / running_results['batch_sizes'],
running_results['d_score'] / running_results['batch_sizes'],
running_results['g_score'] / running_results['batch_sizes'])) # 模型评估
netG.eval()
out_path = 'training_results/SRF_' + str(UPSCALE_FACTOR) + '/'
if not os.path.exists(out_path): # 路径不存在则建立
os.makedirs(out_path)
val_bar = tqdm(val_loader) # 加载验证集
valing_results = {'mse': 0, 'ssims': 0, 'psnr': 0, 'ssim': 0, 'batch_sizes': 0}
val_images = []
for val_lr, val_hr_restore, val_hr in val_bar:
batch_size = val_lr.size(0)
valing_results['batch_sizes'] += batch_size
with torch.no_grad():
lr = Variable(val_lr)
hr = Variable(val_hr)
if torch.cuda.is_available():
lr = lr.cuda()
hr = hr.cuda()
sr = netG(lr) batch_mse = ((sr - hr) ** 2).data.mean()
valing_results['mse'] += batch_mse * batch_size
batch_ssim = pytorch_ssim.ssim(sr, hr).item()
valing_results['ssims'] += batch_ssim * batch_size
valing_results['psnr'] = 10 * log10(1 / (valing_results['mse'] / valing_results['batch_sizes']))
valing_results['ssim'] = valing_results['ssims'] / valing_results['batch_sizes']
val_bar.set_description(
desc='[converting LR images to SR images] PSNR: %.4f dB SSIM: %.4f' % (
valing_results['psnr'], valing_results['ssim'])) # save model parameters
torch.save(netG.state_dict(), '/content/drive/My Drive/app/SRGAN_master/epochs_RBB/RBB_netG_epoch_%d_%d.pth' % (UPSCALE_FACTOR, epoch))
# torch.save(netD.state_dict(), '/content/drive/My Drive/app/SRGAN_master/epochs/RBB_netD_epoch_%d_%d.pth' % (UPSCALE_FACTOR, epoch))
# save loss\scores\psnr\ssim
results['d_loss'].append(running_results['d_loss'] / running_results['batch_sizes'])
results['g_loss'].append(running_results['g_loss'] / running_results['batch_sizes'])
results['d_score'].append(running_results['d_score'] / running_results['batch_sizes'])
results['g_score'].append(running_results['g_score'] / running_results['batch_sizes'])
results['psnr'].append(valing_results['psnr'])
results['ssim'].append(valing_results['ssim']) if epoch % 10 == 0 and epoch != 0:
out_path = '/content/drive/My Drive/app/SRGAN_master/statistics/'
data_frame = pd.DataFrame(
data={'Loss_D': results['d_loss'], 'Loss_G': results['g_loss'], 'Score_D': results['d_score'],
'Score_G': results['g_score'], 'PSNR': results['psnr'], 'SSIM': results['ssim']},
index=range(1, epoch + 1))
data_frame.to_csv(out_path + 'srf_' + str(UPSCALE_FACTOR) + '_train_results.csv', index_label='Epoch')
(3)data_utils.py
from os import listdir
from os.path import join from PIL import Image
from torch.utils.data.dataset import Dataset
from torchvision.transforms import Compose, RandomCrop, ToTensor, ToPILImage, CenterCrop, Resize def is_image_file(filename):
return any(filename.endswith(extension) for extension in ['.png', '.jpg', '.jpeg', '.PNG', '.JPG', '.JPEG', '.tif']) def calculate_valid_crop_size(crop_size, upscale_factor):
return crop_size - (crop_size % upscale_factor) def train_hr_transform(crop_size):
return Compose([
RandomCrop(crop_size),
ToTensor(),
]) def train_lr_transform(crop_size, upscale_factor):
return Compose([
ToPILImage(),
Resize(crop_size // upscale_factor, interpolation=Image.BICUBIC),
ToTensor()
]) def display_transform():
return Compose([
ToPILImage(),
Resize(400),
CenterCrop(400),
ToTensor()
]) class TrainDatasetFromFolder(Dataset):
def __init__(self, dataset_dir, crop_size, upscale_factor):
super(TrainDatasetFromFolder, self).__init__()
self.image_filenames = [join(dataset_dir, x) for x in listdir(dataset_dir) if is_image_file(x)]
crop_size = calculate_valid_crop_size(crop_size, upscale_factor)
self.hr_transform = train_hr_transform(crop_size)
self.lr_transform = train_lr_transform(crop_size, upscale_factor) def __getitem__(self, index):
hr_image = self.hr_transform(Image.open(self.image_filenames[index]))
lr_image = self.lr_transform(hr_image)
return lr_image, hr_image def __len__(self):
return len(self.image_filenames) class ValDatasetFromFolder(Dataset):
def __init__(self, dataset_dir, upscale_factor):
super(ValDatasetFromFolder, self).__init__()
self.image_filenames = [join(dataset_dir, x) for x in listdir(dataset_dir) if is_image_file(x)]
self.upscale_factor = upscale_factor def __getitem__(self, index):
hr_image = Image.open(self.image_filenames[index])
w, h = hr_image.size
crop_size = calculate_valid_crop_size(min(w, h), self.upscale_factor)
lr_scale = Resize(crop_size // self.upscale_factor, interpolation=Image.BICUBIC)
hr_scale = Resize(crop_size, interpolation=Image.BICUBIC)
hr_image = CenterCrop(crop_size)(hr_image)
lr_image = lr_scale(hr_image)
hr_restore_img = hr_scale(lr_image)
return ToTensor()(lr_image), ToTensor()(hr_restore_img), ToTensor()(hr_image) def __len__(self):
return len(self.image_filenames) class TestDatasetFromFolder(Dataset):
def __init__(self, dataset_dir, upscale_factor):
super(TestDatasetFromFolder, self).__init__()
self.lr_path = dataset_dir + '/SRF_' + str(upscale_factor) + '/data/'
self.hr_path = dataset_dir + '/SRF_' + str(upscale_factor) + '/target/'
self.upscale_factor = upscale_factor
self.lr_filenames = [join(self.lr_path, x) for x in listdir(self.lr_path) if is_image_file(x)]
self.hr_filenames = [join(self.hr_path, x) for x in listdir(self.hr_path) if is_image_file(x)] def __getitem__(self, index):
image_name = self.lr_filenames[index].split('/')[-1]
lr_image = Image.open(self.lr_filenames[index])
w, h = lr_image.size
hr_image = Image.open(self.hr_filenames[index])
hr_scale = Resize((self.upscale_factor * h, self.upscale_factor * w), interpolation=Image.BICUBIC)
hr_restore_img = hr_scale(lr_image)
return image_name, ToTensor()(lr_image), ToTensor()(hr_restore_img), ToTensor()(hr_image) def __len__(self):
return len(self.lr_filenames)
(4)loss.py
import torch
from torch import nn
from torchvision.models.vgg import vgg16 class GeneratorLoss(nn.Module):
def __init__(self):
super(GeneratorLoss, self).__init__()
vgg = vgg16(pretrained=True)
loss_network = nn.Sequential(*list(vgg.features)[:31]).eval()
for param in loss_network.parameters():
param.requires_grad = False
self.loss_network = loss_network
self.mse_loss = nn.MSELoss()
self.tv_loss = TVLoss() def forward(self, out_labels, out_images, target_images):
# Adversarial Loss
adversarial_loss = torch.mean(1 - out_labels)
# Perception Loss
perception_loss = self.mse_loss(self.loss_network(out_images), self.loss_network(target_images))
# Image Loss
image_loss = self.mse_loss(out_images, target_images)
# TV Loss
tv_loss = self.tv_loss(out_images)
return image_loss + 0.001 * adversarial_loss + 0.006 * perception_loss + 2e-8 * tv_loss class TVLoss(nn.Module):
def __init__(self, tv_loss_weight=1):
super(TVLoss, self).__init__()
self.tv_loss_weight = tv_loss_weight def forward(self, x):
batch_size = x.size()[0]
h_x = x.size()[2]
w_x = x.size()[3]
count_h = self.tensor_size(x[:, :, 1:, :])
count_w = self.tensor_size(x[:, :, :, 1:])
h_tv = torch.pow((x[:, :, 1:, :] - x[:, :, :h_x - 1, :]), 2).sum()
w_tv = torch.pow((x[:, :, :, 1:] - x[:, :, :, :w_x - 1]), 2).sum()
return self.tv_loss_weight * 2 * (h_tv / count_h + w_tv / count_w) / batch_size @staticmethod
def tensor_size(t):
return t.size()[1] * t.size()[2] * t.size()[3] if __name__ == "__main__":
g_loss = GeneratorLoss()
print(g_loss)
(5)model.py
import math
import torch
# import torch.nn.functional as F
from torch import nn class Generator(nn.Module):
def __init__(self, scale_factor):
upsample_block_num = int(math.log(scale_factor, 2)) super(Generator, self).__init__()
self.block1 = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=9, padding=4),
nn.PReLU()
)
self.block2 = ResidualBlock(64)
self.block3 = ResidualBlock(64)
self.block4 = ResidualBlock(64)
self.block5 = ResidualBlock(64)
self.block6 = ResidualBlock(64)
self.block7 = nn.Sequential(
nn.Conv2d(64, 64, kernel_size=3, padding=1),
nn.BatchNorm2d(64)
)
block8 = [UpsampleBLock(64, 2) for _ in range(upsample_block_num)]
block8.append(nn.Conv2d(64, 3, kernel_size=9, padding=4))
self.block8 = nn.Sequential(*block8) def forward(self, x):
block1 = self.block1(x)
block2 = self.block2(block1)
block3 = self.block3(block2)
block4 = self.block4(block3)
block5 = self.block5(block4)
block6 = self.block6(block5)
block7 = self.block7(block6)
block8 = self.block8(block1 + block7) return (torch.tanh(block8) + 1) / 2 class Discriminator(nn.Module):
def __init__(self):
super(Discriminator, self).__init__()
self.net = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=3, padding=1),
nn.LeakyReLU(0.2), nn.Conv2d(64, 64, kernel_size=3, stride=2, padding=1),
nn.BatchNorm2d(64),
nn.LeakyReLU(0.2), nn.Conv2d(64, 128, kernel_size=3, padding=1),
nn.BatchNorm2d(128),
nn.LeakyReLU(0.2), nn.Conv2d(128, 128, kernel_size=3, stride=2, padding=1),
nn.BatchNorm2d(128),
nn.LeakyReLU(0.2), nn.Conv2d(128, 256, kernel_size=3, padding=1),
nn.BatchNorm2d(256),
nn.LeakyReLU(0.2), nn.Conv2d(256, 256, kernel_size=3, stride=2, padding=1),
nn.BatchNorm2d(256),
nn.LeakyReLU(0.2), nn.Conv2d(256, 512, kernel_size=3, padding=1),
nn.BatchNorm2d(512),
nn.LeakyReLU(0.2), nn.Conv2d(512, 512, kernel_size=3, stride=2, padding=1),
nn.BatchNorm2d(512),
nn.LeakyReLU(0.2), nn.AdaptiveAvgPool2d(1),
nn.Conv2d(512, 1024, kernel_size=1),
nn.LeakyReLU(0.2),
nn.Conv2d(1024, 1, kernel_size=1)
) def forward(self, x):
batch_size = x.size(0)
return torch.sigmoid(self.net(x).view(batch_size)) class ResidualBlock(nn.Module):
def __init__(self, channels):
super(ResidualBlock, self).__init__()
self.conv1 = nn.Conv2d(channels, channels, kernel_size=3, padding=1)
self.bn1 = nn.BatchNorm2d(channels)
self.prelu = nn.PReLU()
self.conv2 = nn.Conv2d(channels, channels, kernel_size=3, padding=1)
self.bn2 = nn.BatchNorm2d(channels) def forward(self, x):
residual = self.conv1(x)
residual = self.bn1(residual)
residual = self.prelu(residual)
residual = self.conv2(residual)
residual = self.bn2(residual) return x + residual class UpsampleBLock(nn.Module):
def __init__(self, in_channels, up_scale):
super(UpsampleBLock, self).__init__()
self.conv = nn.Conv2d(in_channels, in_channels * up_scale ** 2, kernel_size=3, padding=1)
self.pixel_shuffle = nn.PixelShuffle(up_scale)
self.prelu = nn.PReLU() def forward(self, x):
x = self.conv(x)
x = self.pixel_shuffle(x)
x = self.prelu(x)
return x
(6)test_image.py
import argparse
import time import torch
from PIL import Image
from torch.autograd import Variable
from torchvision.transforms import ToTensor, ToPILImage from model import Generator parser = argparse.ArgumentParser(description='Test Single Image')
parser.add_argument('--upscale_factor', default=4, type=int, help='super resolution upscale factor')
parser.add_argument('--test_mode', default='GPU', type=str, choices=['GPU', 'CPU'], help='using GPU or CPU')
parser.add_argument('--image_name', type=str, help='test low resolution image name')
parser.add_argument('--model_name', default='netG_epoch_2_100.pth', type=str, help='generator model epoch name')
opt = parser.parse_args() UPSCALE_FACTOR = opt.upscale_factor
TEST_MODE = True if opt.test_mode == 'GPU' else False
IMAGE_NAME = opt.image_name
MODEL_NAME = opt.model_name model = Generator(UPSCALE_FACTOR).eval()
if TEST_MODE:
model.cuda()
model.load_state_dict(torch.load('/content/drive/My Drive/app/SRGAN_master/' + MODEL_NAME))
else:
model.load_state_dict(torch.load('/content/drive/My Drive/app/SRGAN_master/' + MODEL_NAME, map_location=lambda storage, loc: storage)) image = Image.open(IMAGE_NAME)
with torch.no_grad():
image = Variable(ToTensor()(image)).unsqueeze(0)
if TEST_MODE:
image = image.cuda() start = time.clock()
out = model(image)
elapsed = (time.clock() - start)
print('cost' + str(elapsed) + 's')
out_img = ToPILImage()(out[0].data.cpu())
out_img.save('/content/drive/My Drive/app/SRGAN_master/result/_out_srf_2.tif')
三、遇到的一些问题及技巧
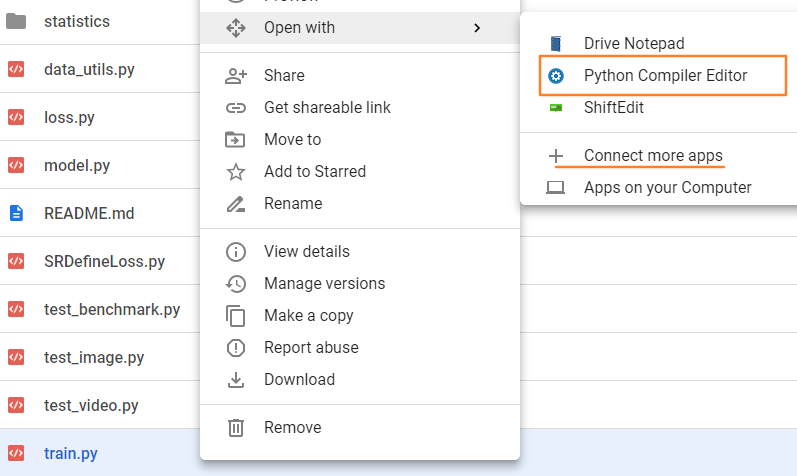
(1)直接使用Google drive修改代码,减少利用win10修改上传下载的麻烦
(2)上面的代码修改可能会存在奇怪的bug,就是空格的编码不同导致错误
解决:代码复制到pycharm上,删除重新打,在复制到原来位置
(3)对于数据集,可以尝试多种不同的组合搭配

但是,这些组合搭配的效果并不一定好,因为:训练集的颜色整体分布决定了测试出来的结果,所以全黑通道不能补
如下例子:
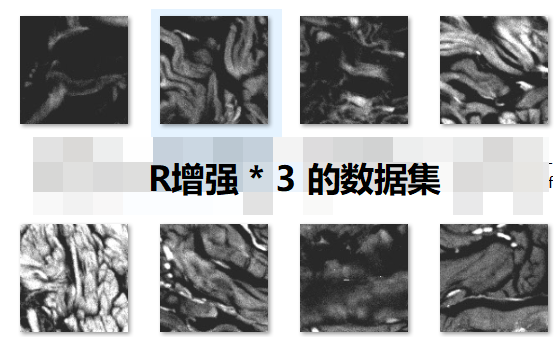
我训练 R增强+R增强+R增强(整体图像成灰色) ,然后出来的都是灰色的:

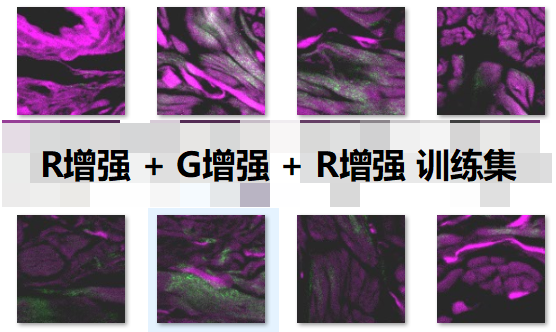
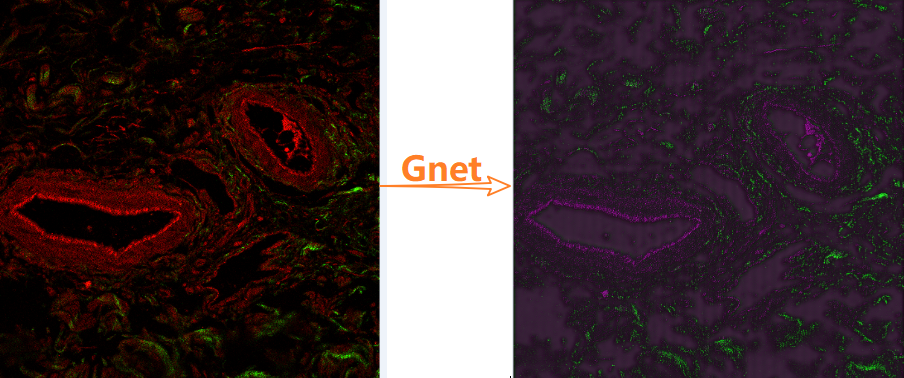
R增强 + G增强 + R 增强,训练集及超分结果:超分结果成紫色绿色,而原来红色没了
R通道增强 + G黑色 + B黑色,训练集如下,超分结果:绿色内容基本消失

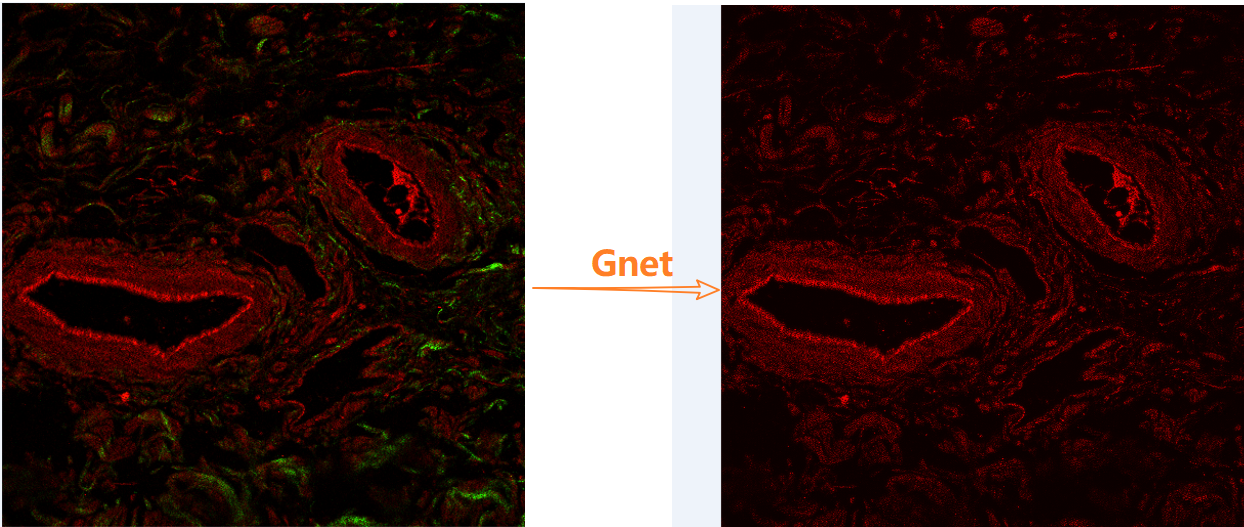
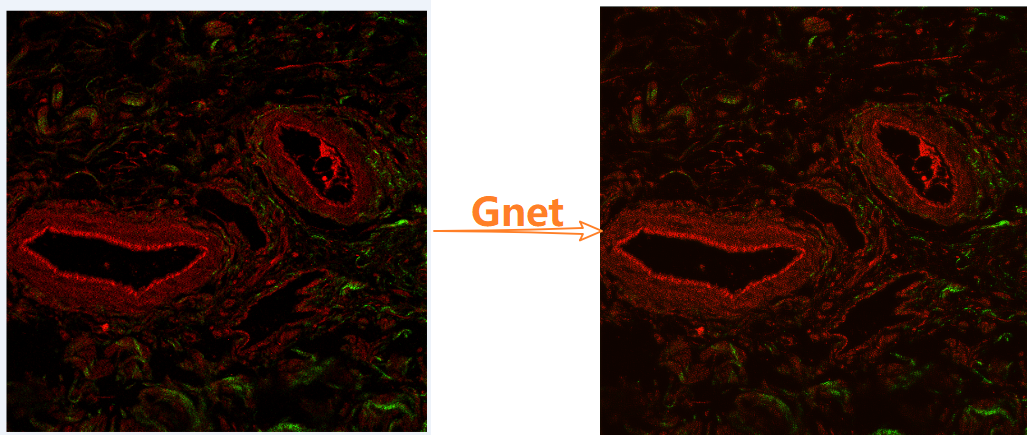
目前训练最好的是:R增强 + G增强 + 黑色B ,训练集包含红色、绿色内容,超分处理图像也比较正常显示

但目前:单张下采样后超分回来的网络中,相比于BSDS300,我们1024图像集效果:像素值比较“实”,但噪点更多,且细节呈现更差
所以, 我认为:要先明确要超分对象的整体内容分布,再确定训练的数据集的分布,这样才能等到比较好的效果。
(4)对于我们要做到其他几个网络,应该都先测试BSDS300的效果,作为比较的标准,超过它为主要目标,在对比不同网络
(5)MATLAB的一个通道合成的小程序
file_path_r = 'D:/ALL_DataSet/R_G_Partition/R_Part/train_target/';% 图像文件夹路径
file_path_g = 'D:/ALL_DataSet/R_G_Partition/G_Part/train_target_1024_128/';% 图像文件夹路径
img_path_list_r = dir(strcat(file_path_r,'*.tif'));%获取该文件夹中所有tif格式的图像
img_path_list_g = dir(strcat(file_path_g,'*.tif'));%获取该文件夹中所有tif格式的图像
img_num = length(img_path_list_r);%获取图像总数量
if img_num > 0 %有满足条件的图像
for k = 1:img_num %逐一读取图像
image_name_r = img_path_list_r(k).name;%
image_name_g = img_path_list_g(k).name;% 图像名 imgr = imread(strcat(file_path_r,image_name_r));
imgg = imread(strcat(file_path_g,image_name_g));
black = imread('D:/PycharmDOC/test_photo/all_black.tif'); x = cat(3, imgr, imgg, imgg); Img_R_path = strcat('D:/ALL_DataSet/RGGE/train/RGGE_' ,image_name_r);
imwrite(x ,Img_R_path);
end
end
(6)MATLAB单通道复制到其他2个通道小程序(如:增强R+增强R+增强R)
file_path = 'D:/ALL_DataSet/R_G_Partition/R_Part/train_input/';% 图像文件夹路径
img_path_list = dir(strcat(file_path,'*.tif'));%获取该文件夹中所有jpg格式的图像
img_num = length(img_path_list);%获取图像总数量
if img_num > 0 %有满足条件的图像
for k = 1:img_num %逐一读取图像
image_name = img_path_list(k).name;% 图像名
img = imread(strcat(file_path,image_name)); x = repmat(img,[1,1,3]);%将单通道图片转换为三通道图片 Img_R_path = strcat('D:/ALL_DataSet/ThreeFoldGrayRed/train_input/TCR_' ,image_name);
imwrite(x ,Img_R_path);
end
end
(7)超分处理出来的图像,首先看细节呈现,再看噪点,再看亮度,因为亮度可以调节
SRGAN 学习心得的更多相关文章
- 我的MYSQL学习心得(一) 简单语法
我的MYSQL学习心得(一) 简单语法 我的MYSQL学习心得(二) 数据类型宽度 我的MYSQL学习心得(三) 查看字段长度 我的MYSQL学习心得(四) 数据类型 我的MYSQL学习心得(五) 运 ...
- 我的MYSQL学习心得(二) 数据类型宽度
我的MYSQL学习心得(二) 数据类型宽度 我的MYSQL学习心得(一) 简单语法 我的MYSQL学习心得(三) 查看字段长度 我的MYSQL学习心得(四) 数据类型 我的MYSQL学习心得(五) 运 ...
- 我的MYSQL学习心得(三) 查看字段长度
我的MYSQL学习心得(三) 查看字段长度 我的MYSQL学习心得(一) 简单语法 我的MYSQL学习心得(二) 数据类型宽度 我的MYSQL学习心得(四) 数据类型 我的MYSQL学习心得(五) 运 ...
- 我的MYSQL学习心得(四) 数据类型
我的MYSQL学习心得(四) 数据类型 我的MYSQL学习心得(一) 简单语法 我的MYSQL学习心得(二) 数据类型宽度 我的MYSQL学习心得(三) 查看字段长度 我的MYSQL学习心得(五) 运 ...
- 我的MYSQL学习心得(五) 运算符
我的MYSQL学习心得(五) 运算符 我的MYSQL学习心得(一) 简单语法 我的MYSQL学习心得(二) 数据类型宽度 我的MYSQL学习心得(三) 查看字段长度 我的MYSQL学习心得(四) 数据 ...
- 我的MYSQL学习心得(六) 函数
我的MYSQL学习心得(六) 函数 我的MYSQL学习心得(一) 简单语法 我的MYSQL学习心得(二) 数据类型宽度 我的MYSQL学习心得(三) 查看字段长度 我的MYSQL学习心得(四) 数据类 ...
- 我的MYSQL学习心得(七) 查询
我的MYSQL学习心得(七) 查询 我的MYSQL学习心得(一) 简单语法 我的MYSQL学习心得(二) 数据类型宽度 我的MYSQL学习心得(三) 查看字段长度 我的MYSQL学习心得(四) 数据类 ...
- 我的MYSQL学习心得(八) 插入 更新 删除
我的MYSQL学习心得(八) 插入 更新 删除 我的MYSQL学习心得(一) 简单语法 我的MYSQL学习心得(二) 数据类型宽度 我的MYSQL学习心得(三) 查看字段长度 我的MYSQL学习心得( ...
- 我的MYSQL学习心得(九) 索引
我的MYSQL学习心得(九) 索引 我的MYSQL学习心得(一) 简单语法 我的MYSQL学习心得(二) 数据类型宽度 我的MYSQL学习心得(三) 查看字段长度 我的MYSQL学习心得(四) 数据类 ...
随机推荐
- WebStrom 中文显示异常中文变样乱码
问题描述 WebStorm 编辑文件时中文显示异常,大小不一 菜单栏字体需要更换 解决方法 修改编辑器字体 菜单栏默认字体取消 设置效果 编辑文件时中英文显示 菜单栏 其他相关 关于编码格式,这里未做 ...
- 3.移动端自动化测试-appium环境搭建(原理)
appium自动化原理: 需要服务端(appium启动),手机端(adb连接设备),脚本端(pycharm)就可以进行 自己总结下: 手机和脚本连接:1.adb连接,2靠脚本导入驱动. 脚本和服务端连 ...
- Tomcat项目自动部署脚本
一般情况下使用的Linux环境都是加固的,root路径只有超级管理员权限才能进入.我们新建一个自己的用户,在/home下会有一个用户目录,传输war包都放在这个目录下,此时不动webapps文件下的内 ...
- How to mount remote windows partition (windows share) under Linux
http://www.cyberciti.biz/tips/how-to-mount-remote-windows-partition-windows-share-under-linux.html ...
- CentOS7.2安装Airflow
1 安装pip yum -y install epel-release yum install python-pip 2 更新pip pip install --upgrade pip pip ins ...
- 详解python中的描述符
描述符介绍 总所周知,python声明变量的时候,不需要指定类型.虽然现在有了注解,但这只是一个规范,在语法层面是无效的.比如: 这里我们定义了一个hello函数,我们要求name参数传入str类型的 ...
- 22_6mybatis中的缓存
1.mybatis中的延时加载 问题:在一对多中,当我们有一个用户,它有100个账户. 在查询用户的时候,要不要把关联的账户查出来? 在查询账户的时候,要不要把关联的用户查出来? 在查询用户时,用户下 ...
- Change :hover CSS properties with JavaScript
I need to find a way to change CSS :hover properties using JavaScript. For example, suppose I have t ...
- 电脑同时安装了python2和python3后,随意切换版本并使用pip安装
第一步: python2安装路径下python.exe重命名为python2.exe,python3安装路径下python.exe重命名为python3.exe; 第二步: 分别为python2.ex ...
- django 模型层(orm)05
目录 配置测试脚本 django ORM基本操作 增删改查 Django 终端打印SQL语句 13条基本查询操作 双下滑线查询 表查询 建表 一对多字段数据的增删改查 多对多字段数据的增删改查 基于对 ...