ROS-Gazebo-turtlebot3仿真
前言:Gazebo是一款强大的3D仿真器,支持机器人开发所需的机器人、传感器和环境模型,并且通过搭载的物理引擎可以得到逼真的仿真结果。即便Gazebo是一款开源仿真器,却具有高水准的仿真性能,因此在机器人工程领域中非常流行。
前提:已安装了turtlebot3软件包,如没有安装,可参考:https://www.cnblogs.com/chendeqiang/p/10227401.html
https://github.com/huchunxu/ros_exploring
一、 启动“世界”仿真图像
roslaunch turtlebot_gazebo turtlebot_world.launch
------------------------------------
显示如下:

shift+鼠标左键 可以调整视角。
注:如果启动失败,可以注销后再重新打开就可以正常显示了。
二、启动键盘控制
启动键盘控制:
roslaunch turtlebot_teleop keyboard_teleop.launch
三、启动rviz查看turtlbot摄像机采集的信息
roslaunch turtlebot_rviz_launchers view_robot.launch
勾选左边的depthcloud就可以看到,记得切换一下topic。按鼠标左键可调整视角。
-----------------------------------------
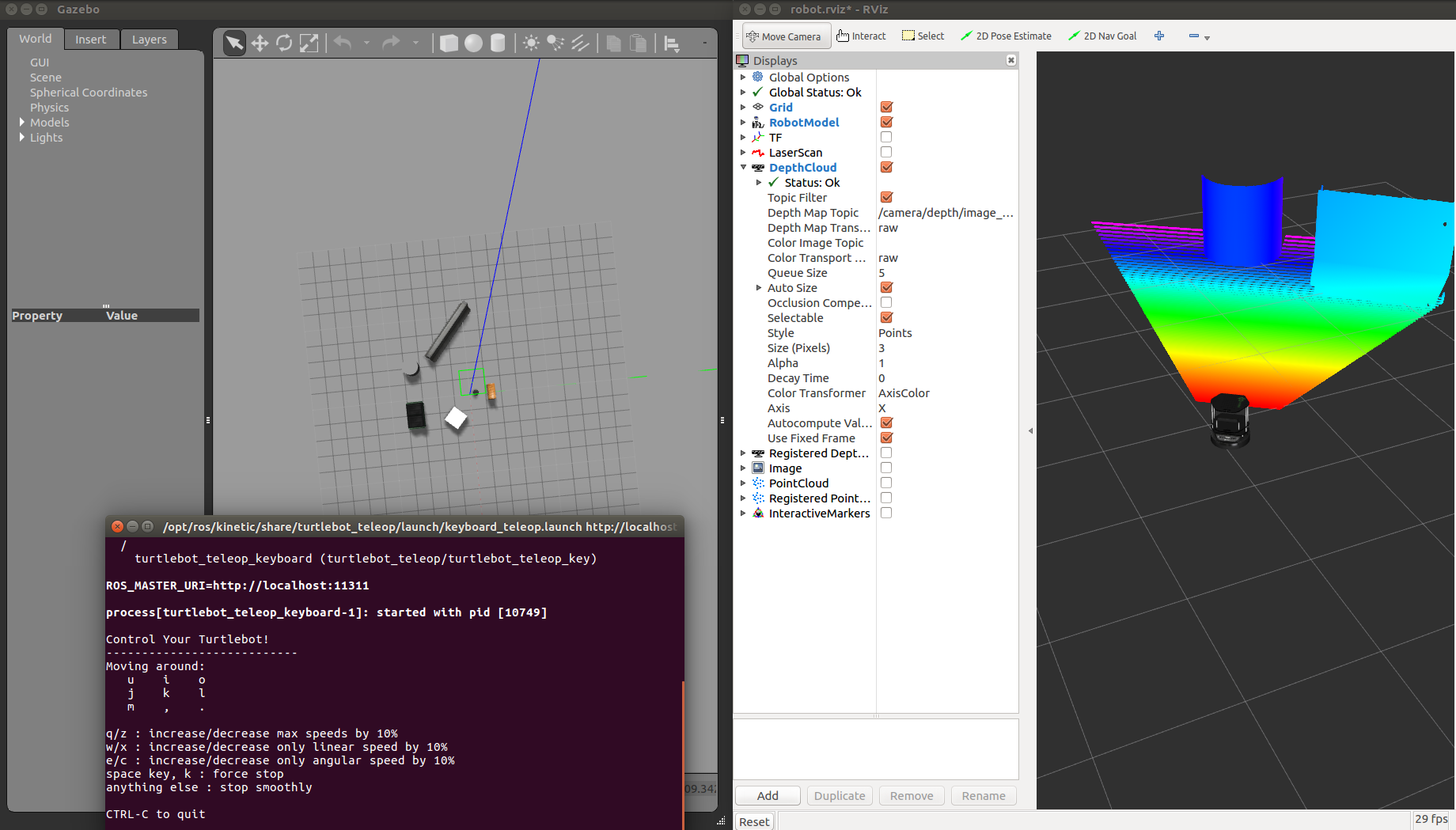
显示如下:

四、最终版
左边是gazebo,右边是rviz,前端是键盘控制。
五、launch文件解析
<launch>
<!-- 设置launch文件的参数 -->
<arg name="world_name" value="$(find mrobot_gazebo)/worlds/playground.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mrobot_gazebo)/urdf/mrobot.urdf.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
launch文件主要做了两件事:
1.启动机器人的状态发布节点,同时加载带有Gazebo属性的机器人urdf模型;
2.启动Gazebo,并且将机器人模型加载到Gazebo仿真环境中。
六、运行摄像头仿真
启动仿真环境
roslaunch view_mrobot_with_camera_gazebo.launch
启动rqt
rqt_image_view
-END-
ROS-Gazebo-turtlebot3仿真的更多相关文章
- Ubuntu 18.04 + ROS Melodic + TurtleBot3仿真
1. 下载安装包 官网地址: http://wiki.ros.org/action/show/Robots/TurtleBot?action=show&redirect=TurtleBot 所 ...
- ROS(indigo)_pr2_simulator仿真(gazebo)示例
ROS(indigo)_pr2_simulator仿真(gazebo)示例 1 开启pr2仿真 ~$ roslaunch gazebo_ros empty_world.launch ~$ roslau ...
- ROS(indigo)_turtlebot仿真示例包括stage和gazebo
ROS(indigo)_turtlebot仿真示例包括stage和gazebo 现上参考网址: turtlebot:http://wiki.ros.org/Robots/TurtleBot stage ...
- 【探索之路】机器人篇(5)-Gazebo物理仿真环境搭建_让机器人运动起来
如果完成了前两步,那么其实我们已经可以去连接我们的现实中的机器人了. 但是,做机器人所需要的材料还没有到,所以我们这里先在电脑平台上仿真一下.这里我们用到的就算gazebo物理仿真环境,他能很好的和R ...
- 多指灵巧手MoveIt!与Gazebo联合仿真框架搭建
至于为什么叫框架,一是因为灵巧手的3维模型没有按照基本的设计要求画,正常来说,设计机器人机构之前应该设计好机构需要多少个自由度/DOF,每个自由度是旋转/revolute类型还是滑移/prismati ...
- ROS(indigo)国外开源示例包括多机器人控制等基于V-Rep和Gazebo的仿真
ROS(indigo)国外开源示例包括多机器人的V-Rep和Gazebo仿真等 1 micros_swarm_framework 使用超级经典的stage. http://wiki.ros.org/m ...
- 安卓手机与ROS通信遥控Gazebo中仿真机器人小车运动(ROS_indigo)
首先,先列出需要用到的一些文件: Gazebo中机器人模型及说明: http://wiki.ros.org/grizzly_simulator https://github.com/g/grizzly ...
- Making my own Autonomous Robot in ROS / Gazebo, Day 2: Enable the robot
Day 2: Enable the robot Git Setting git checkout master git branch day2_enable_robot git push --set- ...
- Making my own Autonomous Robot in ROS / Gazebo, Day 1: Building the static model
Day 1: Setting up ROS: Indigo OS: Ubuntu 14.04 OS: Gazebo 7.0.0 Initialize the workspace To create t ...
- ROS机器人导航仿真(kinetic版本)
准备工作: ubuntu 16.04系统;ROS kinetic版本;ROS包turtlebot,导航包rbx1,模拟器arbotix,可视化rviz 1.安装ubuntu 16.04系统与安装ROS ...
随机推荐
- jQuery中样式和属性模块简单分析
1.行内样式操作 目标:扩展框架实现行内样式的增删改查 1.1 创建 css 方法 目标:实现单个样式或者多个样式的操作 1.1.1 css方法 -获取样式 注意:使用 style 属性只能获取行内样 ...
- 8 Mistakes to Avoid while Using RxSwift. Part 1
Part 1: not disposing a subscription Judging by the number of talks, articles and discussions relate ...
- eclipse tomcat发布路径在哪?
- 转载:移动端自适应:flexible.js可伸缩布局使用
阿里团队开源的一个库.flexible.js,主要是实现在各种不同的移动端界面实现一稿搞定所有的设备兼容自适应问题. 实现方法: 通过JS来调整html的字体大小,而在页面中的制作稿则统一使用rem这 ...
- vc++如何创建程序-构造函数
如果给Animal带参,则提示没有缺省的构造函数了,缺省就是不带参数的 改进:从子类当中向基类传递代参的,这样他就会给Animal传递400,300 对一个常量来调用 #include<iost ...
- springboot版本控制
HandlerMapping通过继承InitializingBean接口在完成实例后,扫描所有的Controller和标识RequestMapping的方法,缓存这个映射对应关系.然后在应用运行的时候 ...
- Nginx1.14.2新增tcp/udp代理stream
[root@rhel nginx-1.12.1]# ./configure --help --help print this message --prefix=PATH set installatio ...
- kernel 3.10内核源码分析--hung task机制
kernel 3.10内核源码分析--hung task机制 一.相关知识: 长期以来,处于D状态(TASK_UNINTERRUPTIBLE状态)的进程 都是让人比较烦恼的问题,处于D状态的进程不能接 ...
- java+selenium+testNG+excel 实现 web 网页的自动化测试
webdriver的关键字从excel读取,这样测试人员只需要在excel中填写相关用例即可 前端微站和后台系统的用例可整合在同一excel中,这样可实现前端与后台的闭循环测试 除了一些基本的校验规则 ...
- HDU 1575 EASY
#include <iostream> #include <cstdio> #include <cstring> #include <algorithm> ...